







RRPR机械臂建模及仿真
(1)机器人建模
在solidworks中绘制机械臂的简单模型,将零件文件导入simulink中,完成坐标系变换的设置,完成机械臂的搭建。

Simulink机械臂搭建图
完成搭建后使用改进DH方法建立连杆坐标系,完成DH参数表,并求解工具坐标系到基坐标系的变换矩阵。
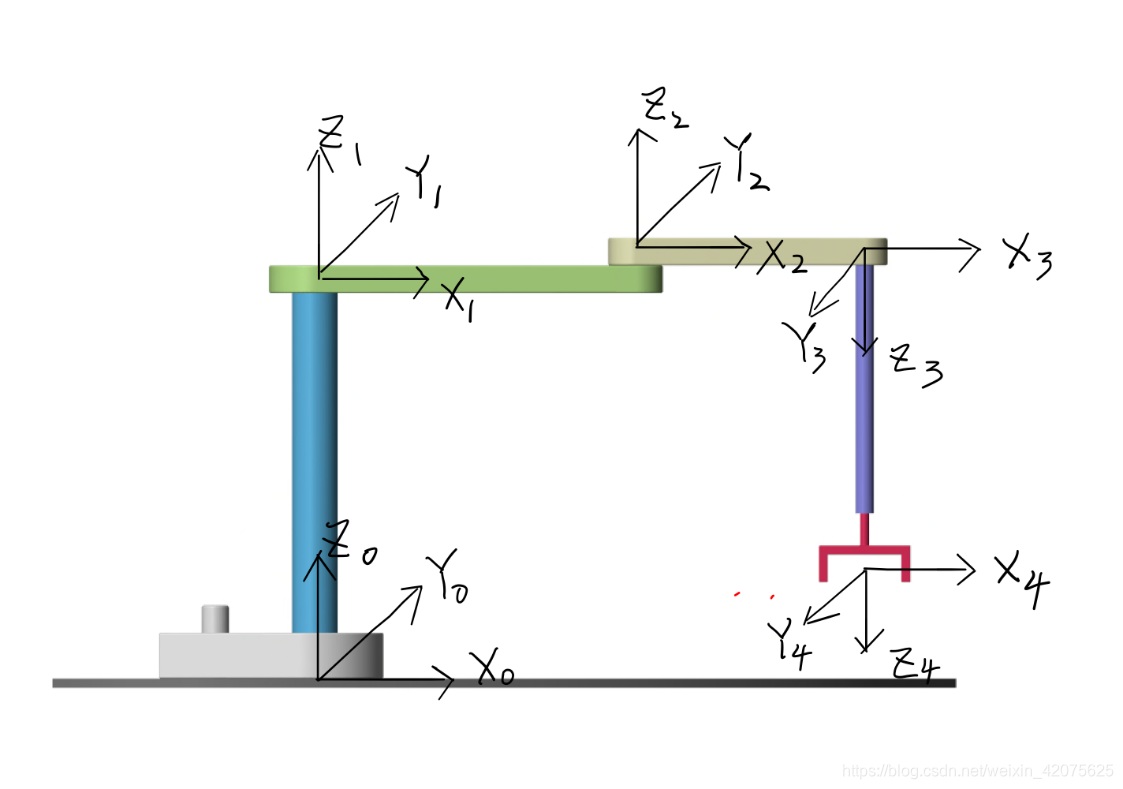
DH模型图
DH参数表为:
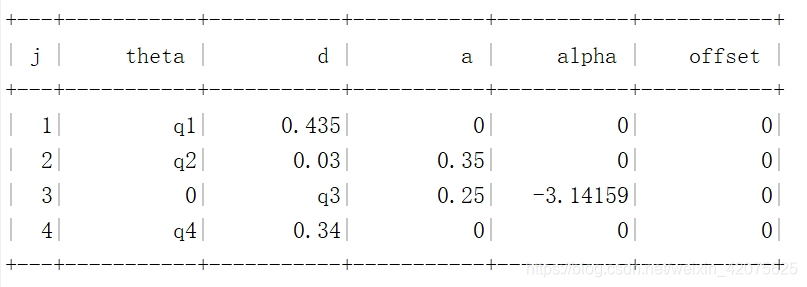
通过程序fk_test求得工具坐标系到基坐标系的变换矩阵为:

最后设置机械臂材料的密度为2.7g/cm3![]() ,完成建模。
,完成建模。
在solidworks中绘制机械臂的简单模型,将零件文件导入simulink中,完成坐标系变换的设置,完成机械臂的搭建。
Simulink机械臂搭建图
完成搭建后使用改进DH方法建立连杆坐标系,完成DH参数表,并求解工具坐标系到基坐标系的变换矩阵。
DH模型图
DH参数表为:
通过程序fk_test求得工具坐标系到基坐标系的变换矩阵为:
最后设置机械臂材料的密度为2.7g/cm3![]() ,完成建模。
,完成建模。
 5084
2500
5084
2500

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























