







 本文详细介绍了SLAM问题的状态估计背景,强调了非线性优化在解决SLAM问题中的核心地位。通过数学推导,阐述了如何在已知运动和观测数据下,利用非线性优化技术求解相机位姿和路标点的世界坐标。同时,提供了手写笔记PDF供读者下载,以便进一步学习和理解。
本文详细介绍了SLAM问题的状态估计背景,强调了非线性优化在解决SLAM问题中的核心地位。通过数学推导,阐述了如何在已知运动和观测数据下,利用非线性优化技术求解相机位姿和路标点的世界坐标。同时,提供了手写笔记PDF供读者下载,以便进一步学习和理解。
《SLAM十四讲》理论部分专栏
《SLAM十四讲》实践部分专栏
一、引入

经过前几讲的学习,我们知道了SLAM的数学表示方式(如上图),那怎么求解这个数学问题呢?这是
一个什么问题呢?我们来理一理。
我们已知的是:运动方程、观测方程、运动数据、图片数据;
我们求解目标的是:相机各个时刻的位姿和路标点的世界坐标。
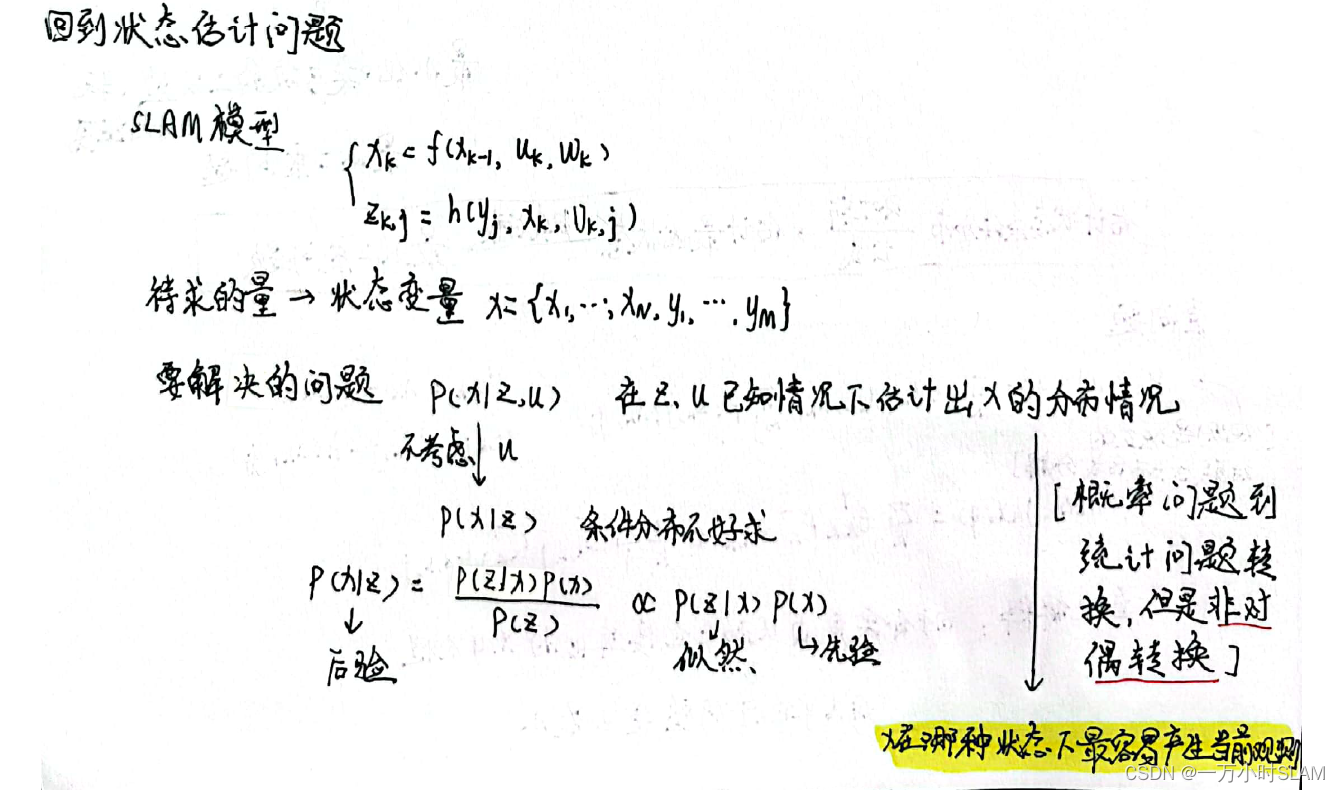
概括起来就是:在已知SLAM模型的情况下,通过带噪声的数据z和u推断位姿x和地图y的概率分布,这是一个状态估计问题。
状态估计问题如何求解呢?
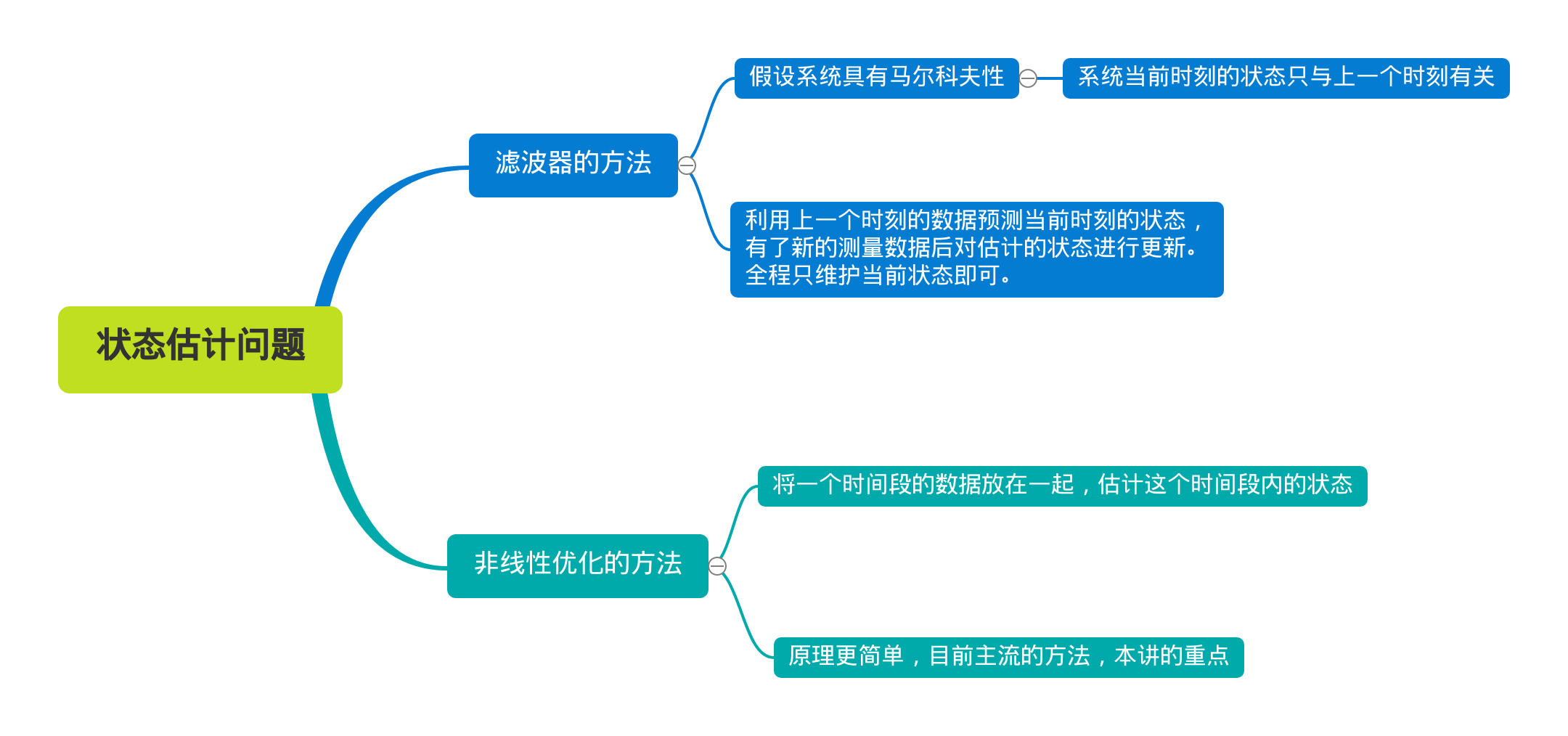
本讲内容针对非线性优化进行展开介绍。
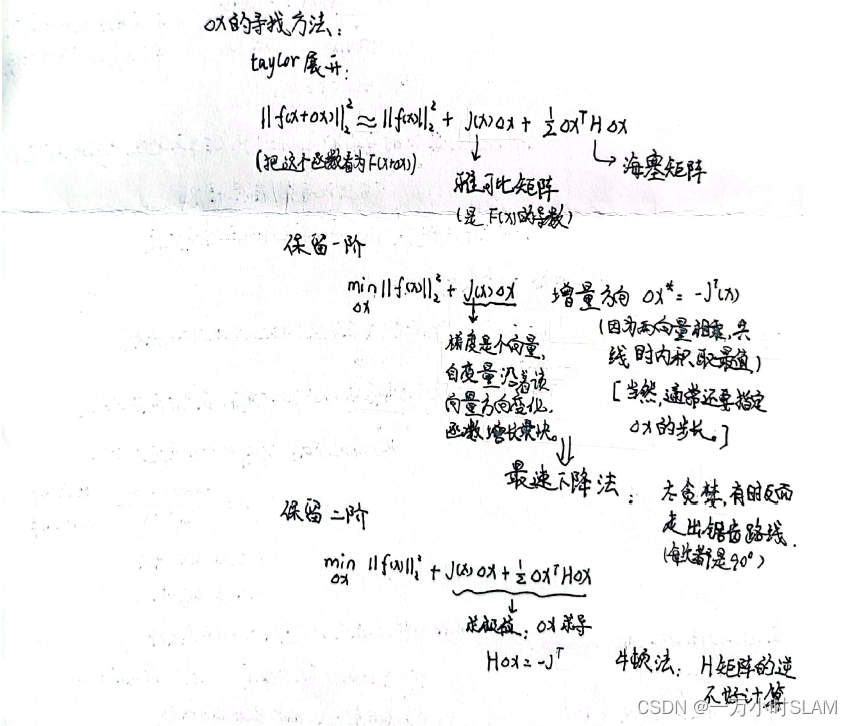
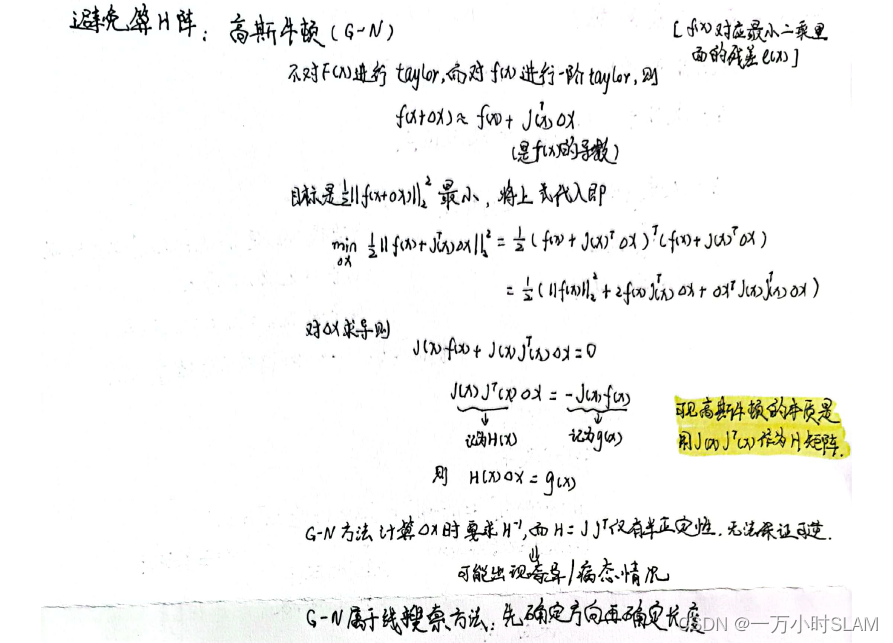
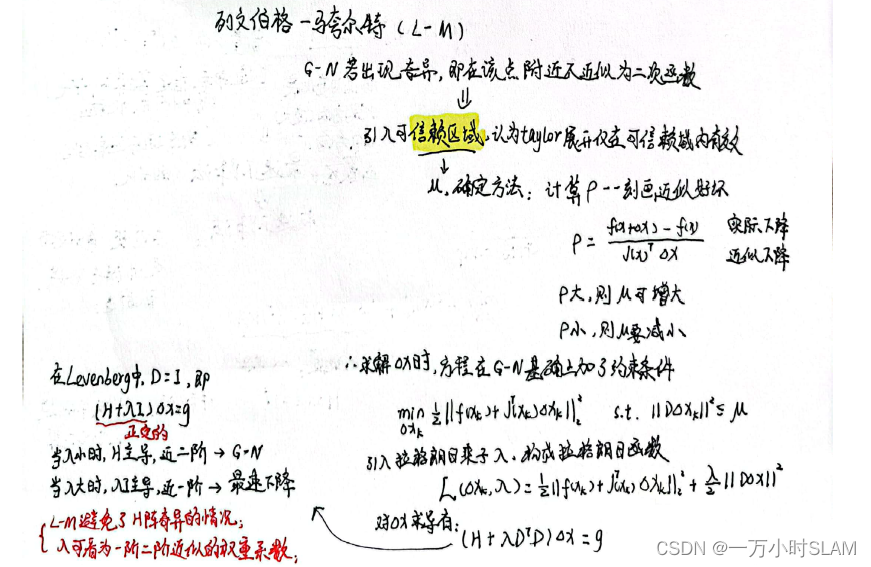
二、非线性优化
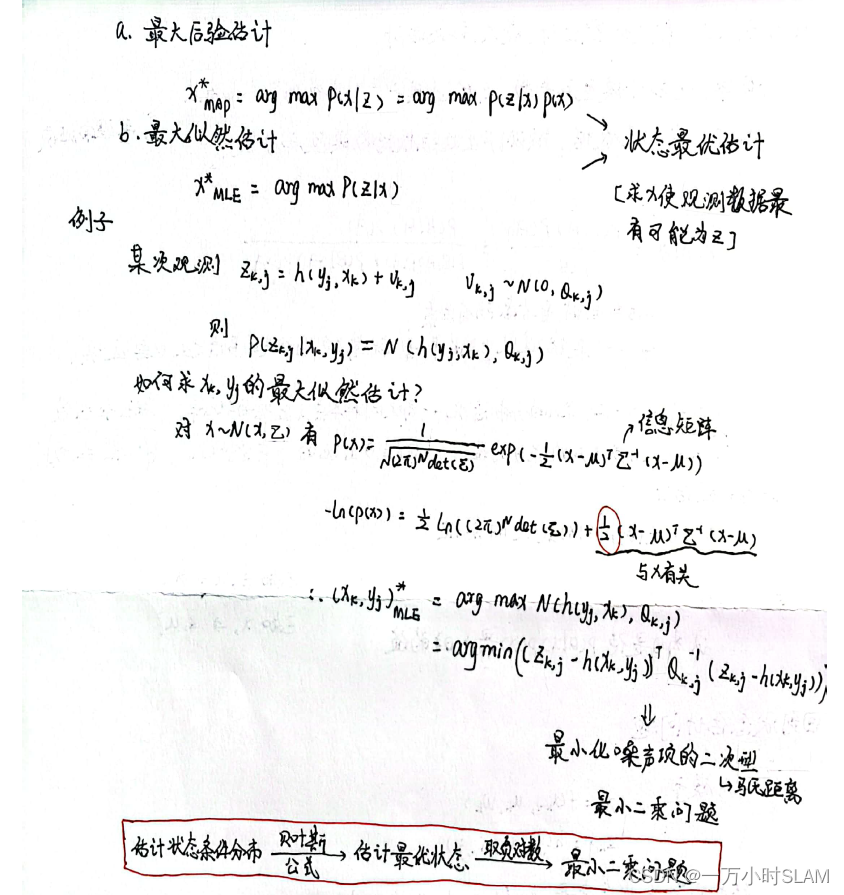
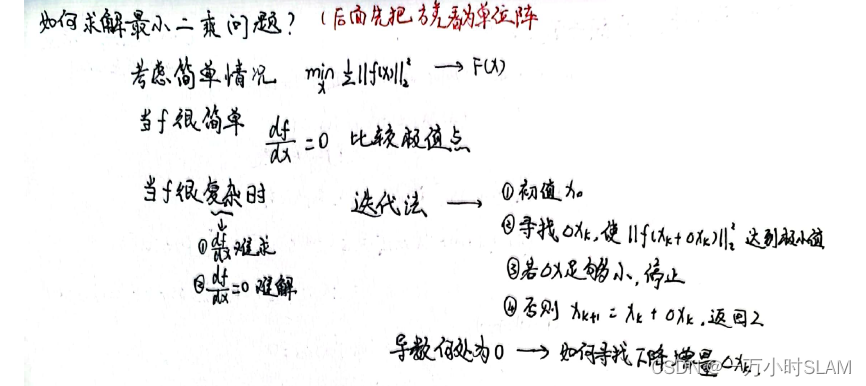
数学推导比较多,这里放手写笔记
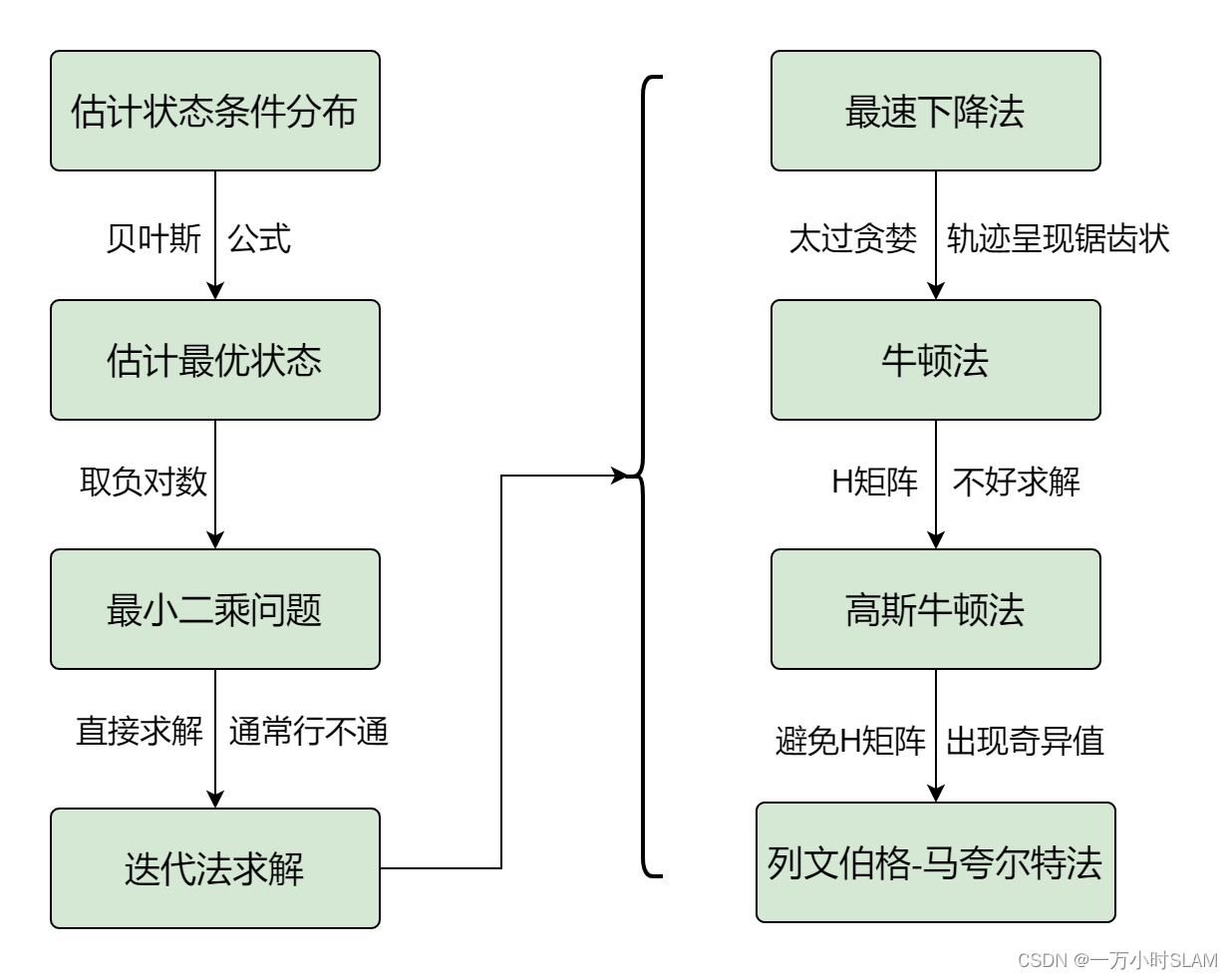
三、知识联系的总结
一张图总结一下本讲知识间的联系。
看完文章觉得有用的的话,可以点赞、收藏、关注、订阅专栏嘛,你的肯定是我最大的动力!!!😘🌹


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









