






 超级会员免费看
超级会员免费看
目录
首先,欢迎关注抖音号,里面有嵌入式相关知识,我会定时更新干货!不会让你们失望。

一、硬件配置
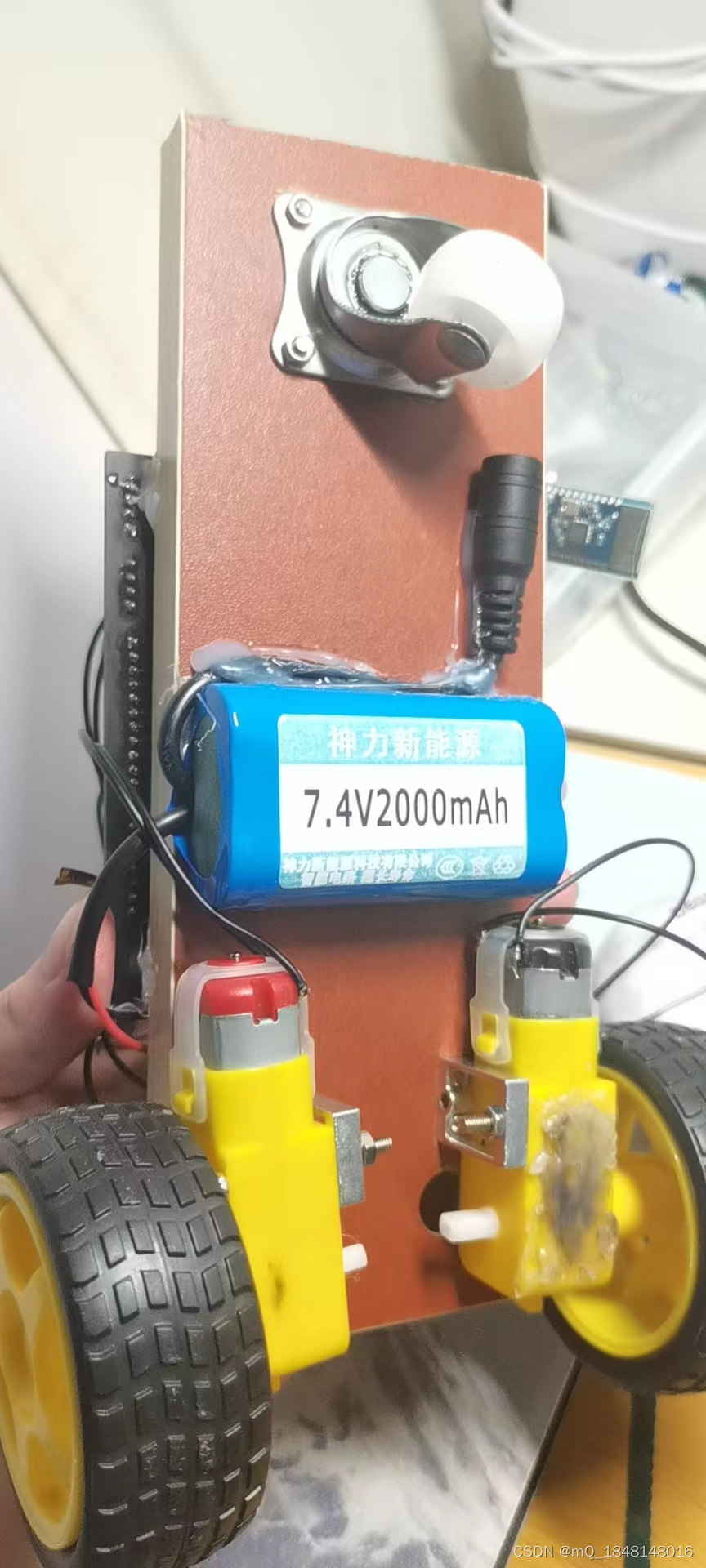
配件:
-
7.4V锂电池
-
两个马达
-
L298n电机驱动模块
-
JDY-31蓝牙模块
-
stm32f407zgt6单片机
1.作品实图
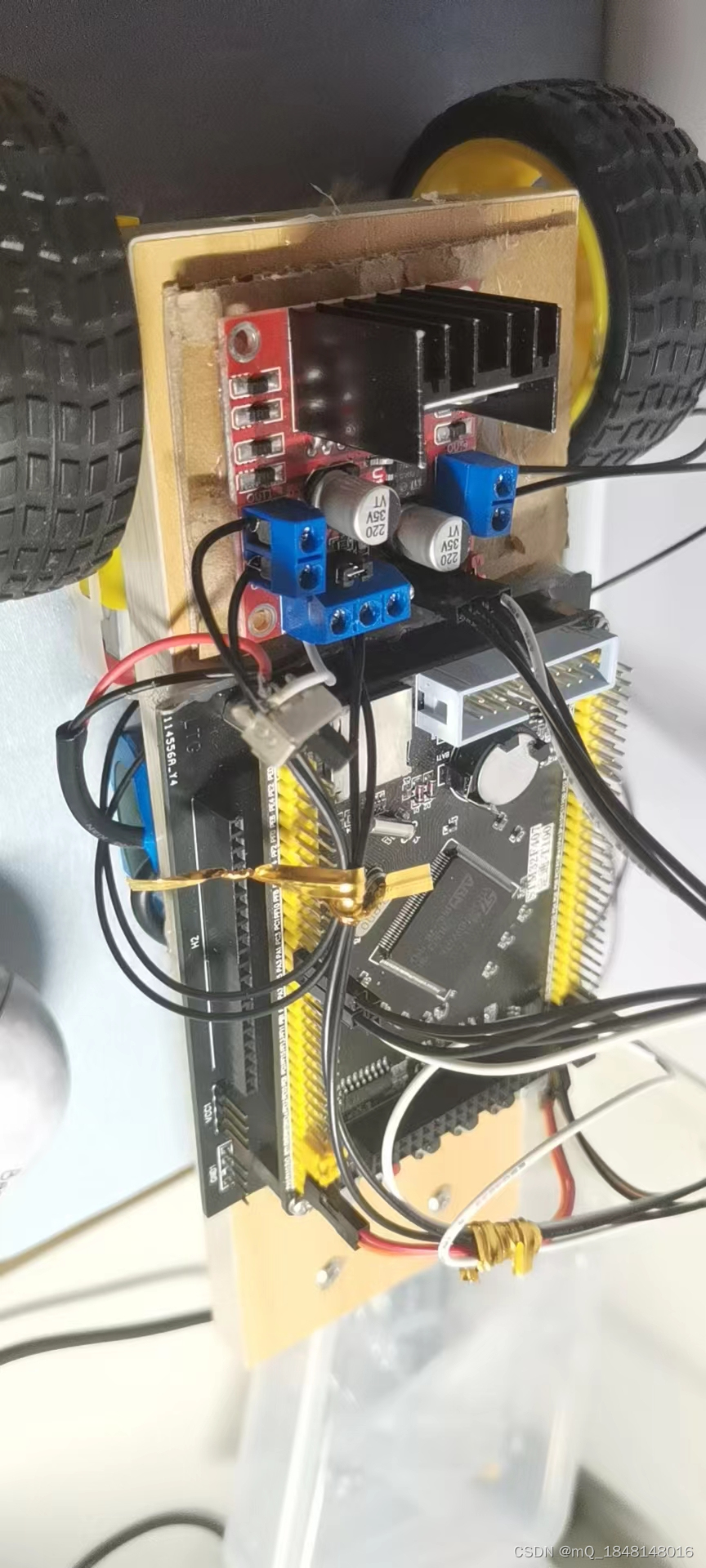
2.L298n电机驱动模块
1、单片机在CubeMx上配置四个引脚连接逻辑输入四个引脚
2、将两个马达分别引出两条线接输出A和输出B,同时接跳线帽使能通道A和通道B
3、接入7-12V电源在12V供电口(可以在此

目录
首先,欢迎关注抖音号,里面有嵌入式相关知识,我会定时更新干货!不会让你们失望。
配件:
7.4V锂电池
两个马达
L298n电机驱动模块
JDY-31蓝牙模块
stm32f407zgt6单片机
1、单片机在CubeMx上配置四个引脚连接逻辑输入四个引脚
2、将两个马达分别引出两条线接输出A和输出B,同时接跳线帽使能通道A和通道B
3、接入7-12V电源在12V供电口(可以在此
 1万+
2510
2264
6829
1万+
2510
2264
6829











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
























