




文章目录
Evaluation Metrics
Percentage of Correct Parts - PCP
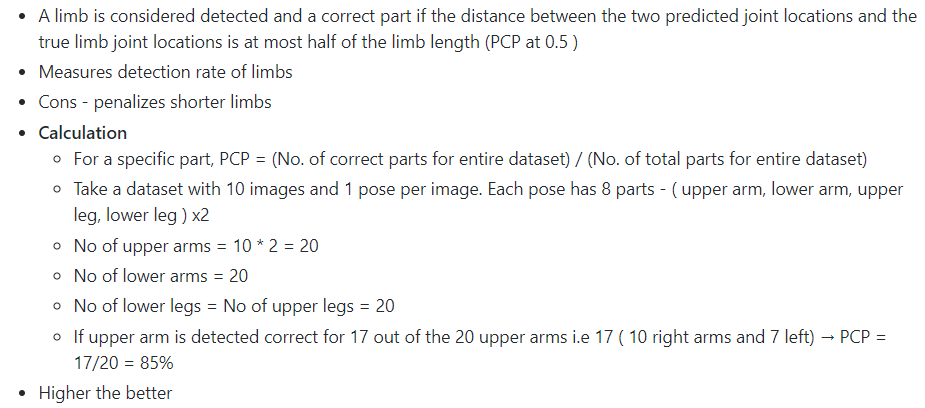
如果两个预测的关节位置和真实的肢体关节位置之间的距离最大为 肢体长度(limb length) 的一半(PCP为0.5),则认为肢体已被检测为正确的部位
用于测量四肢的检出率
缺点-处罚短肢
越高越好
Percentage of Correct Key-points - PCK
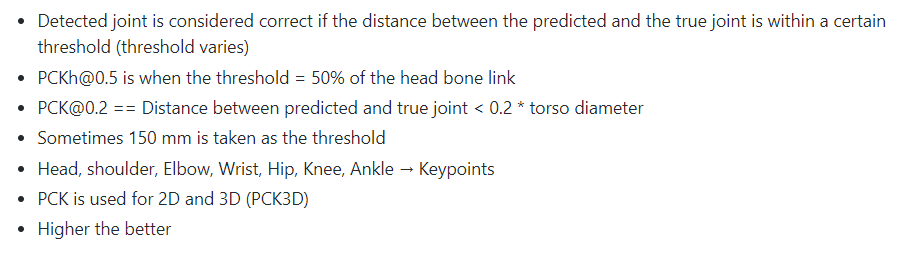
如果预测的关节与真实的关节之间的距离在某个阈值内(阈值变化),则检测到的关节被认为是正确的
越高越好
Percentage of Detected Joints - PDJ

如果预测的关节与真实的关节之间的距离在躯干直径(torso diameter)的特定范围内,则检测到的关节被认为是正确的
越高越好
Mean Per Joint Position Error - MPJPE

每个关节位置误差=地面真实情况与关节预测之间的欧式距离
每个关节位置误差的平均值=所有k个关节的每个关节位置误差的平均值(通常,k = 16)
越低越好

















 306
306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









