







Jian书账号被盗,虽然没有写啥子文档,但是总感觉不舒坦,本次主要对CLASSIC AUTOSAR进行简要的介绍,让大家有个概念。
简单来说AUTOSAR是一套软件架构,它涉及到了从软件底层到上层的各个模块,底层是和硬件相关的驱动模块,上层主要是和应用逻辑,算法相关的应用层。在这两者之间有中间的抽象层,服务层和RTE模块,每个模块都有自己的功能,每个模块的功能在AUTOSAR的标准文档中都有描述,文档较多并且有些信息并没有详细说明,本博主主要是对一些大家比较模糊的信息进行阐述,让大家对整体和细节都有所了解。
在没有AUTOSAR架构时,各个公司都拥有自己的一套软件架构,有些复杂,有些简单。不同的架构之间,接口,参数定义的不统一,功能的重叠导致不同架构之间的软件模块复用几乎不可能。因此针对这种情况(还有其他的情况,对于开发人员来说这点很重要),AUTOSAR架构被提出来了,它描述了整个架构中有哪些功能模块,模块与模块的交互接口有哪些,模块的整体功能是什么,模块的配置项有哪些,基于整个架构开发的标准软件,即使是不同的公司的产品也可以很好地进行衔接和复用。
AUTOSAR的架构图简要如下:
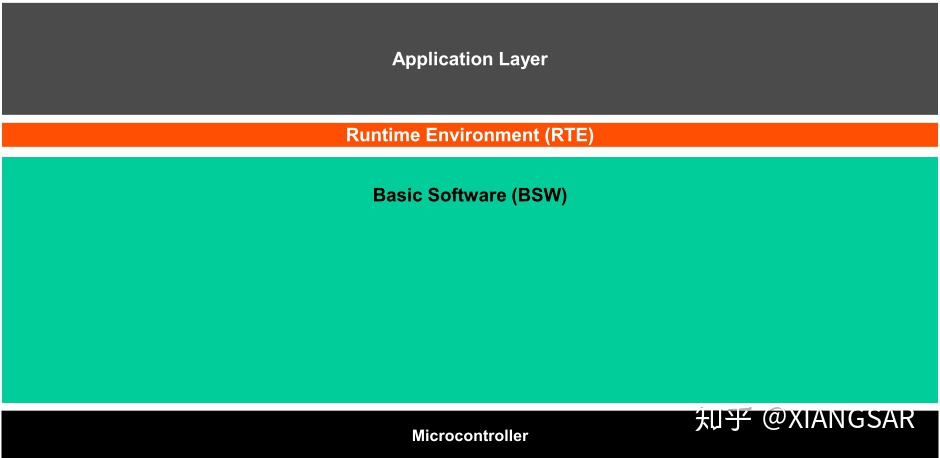
从上往下依次是SWC,RTE,BSW,ECU,其中最上层就是应用层
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1939
1939











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









