






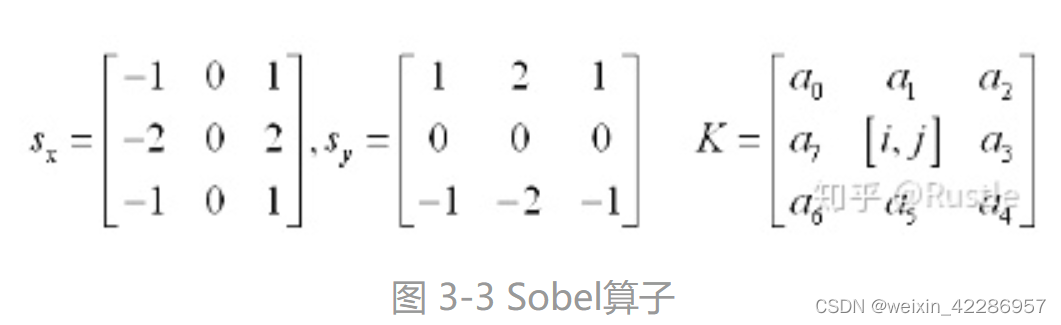
sober算子
对图像求xy的一阶导
优缺点:
灰度渐变和噪声较多的图像处理效果较好为什么
sobel算子对边缘定位不是很准确,图像的边缘不止一个像素;当对精度要求不是很高时,是一种较为常用的边缘检测方法。 为什么
canny算子
-
算法原理
基于Canny算子的边缘检测主要有5个步骤:
依次是高斯滤波、sober像素梯度计算、 -
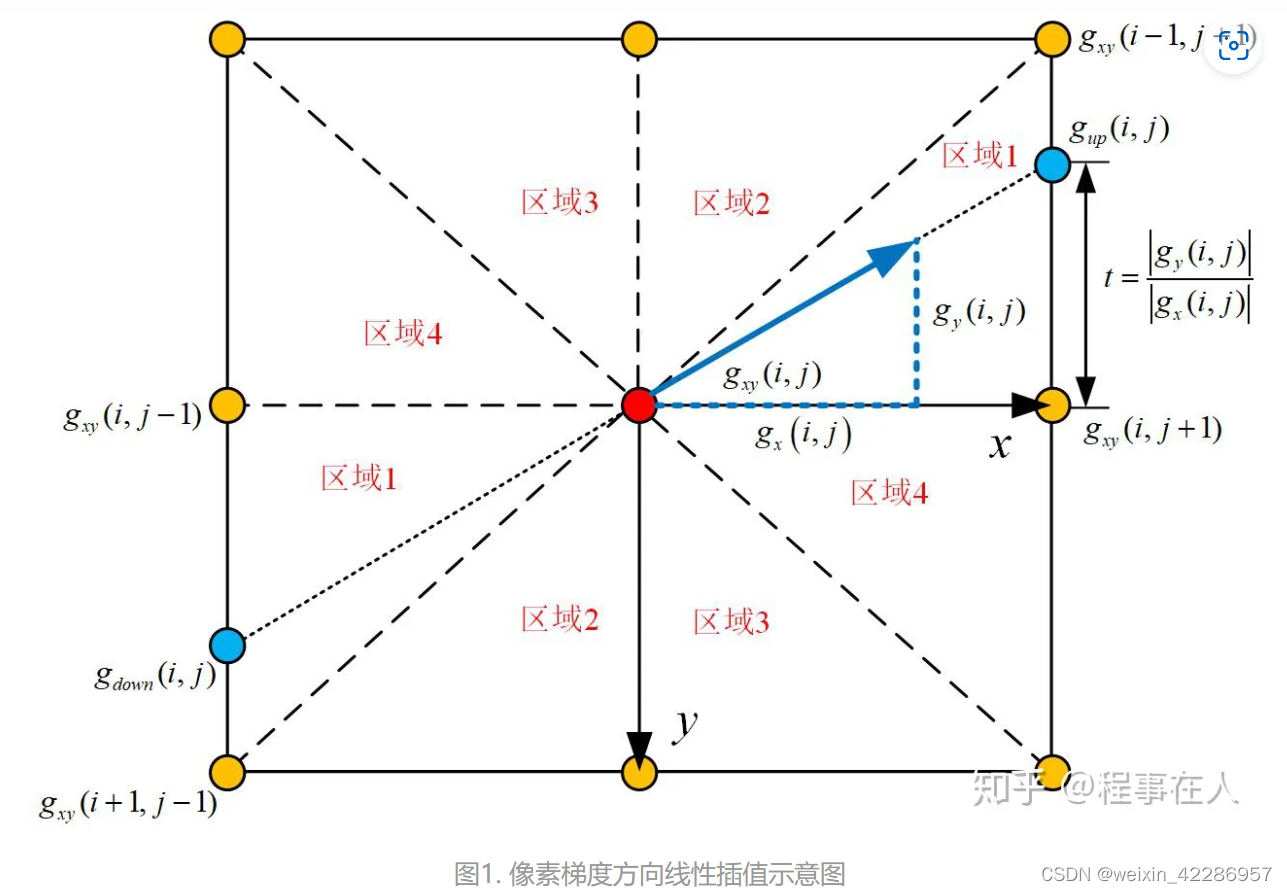
非极大值抑制:
目的:对边缘瘦身
讲解的网站
-
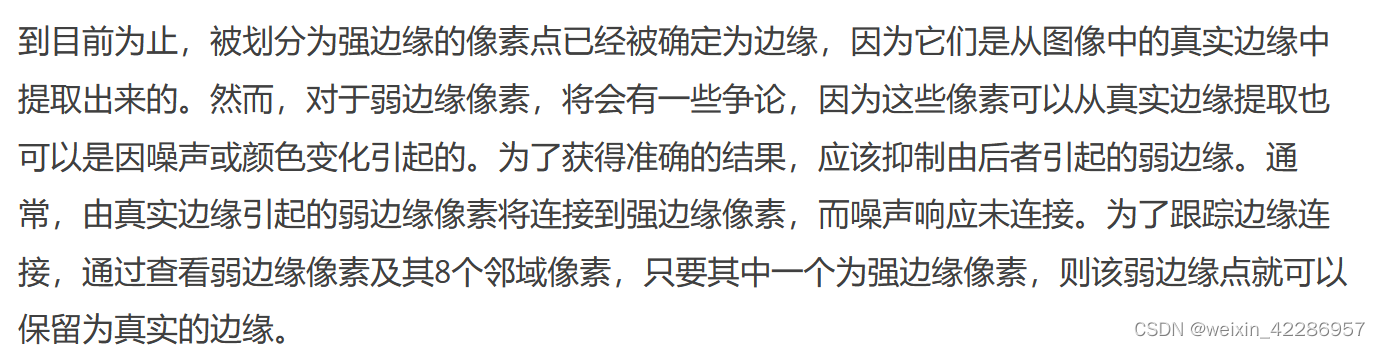
滞后阈值处理
定义一个高阈值和一个低阈值。梯度强度低于低阈值的像素点被抑制,不作为边缘点;高于高阈值的像素点被定义为强边缘,保留为边缘点;处于高低阈值之间的定义为弱边缘,留待进一步处理。 -
孤立弱边缘抑制。
优缺点:
拉普拉斯算子
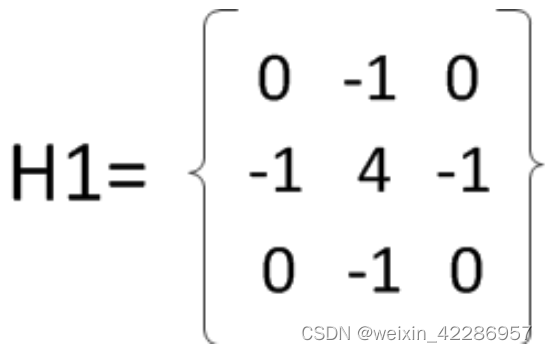
- 基本思想:
邻域的中心像素灰度低于它所在邻域内的其他像素的平均灰度时,此中心像素的灰度应该进一步降低;当高于时进一步提高中心像素的灰度,从而实现图像锐化处理。 - 缺点:对边缘敏感度高,导致存在噪声边缘
- 优点:
1.Laplacian算子是各向同性的,能对任何走向的界线和线条进行锐化,无方向性。这是拉普拉斯算子区别于其他算法的最大优点。
2.若拉普拉斯算子在当前像素位置上的值为正,说明该像素的灰度值比周围像素的灰度值要大,即当前像素与周围像素之间存在较大的灰度变化。因此,该像素所在的位置被视为明区,即像素值比周围像素值明亮。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









