







1、SLAM 两大基本问题:定位、建图(定位和建图相互耦合:精确的定位需要精确的地图;精确的地图来自精确的定位)
2、SLAM传感器:
-
传感器有两类
-
安装于环境中(二维码 Marker、GPS、导航、磁条)
-
携带于机器人本体上(IMU、激光、相机)
-
-
SLAM更倾向使用携带式传感器是因为环境中的传感器限制了应用环境:
-
需要环境允许使用GPS、允许贴marker
-
而SLAM强调未知环境
-
更重视携带式传感器
-
-
SLAM激光传感器和相机传感器的优缺点
-
激光传感器优点:精确、快、研究成熟;
-
激光传感器缺点:重、贵
-
相机传感器优点:便宜、轻巧、信息丰富
-
相机传感器缺点:消耗更多的计算资源(视频流的解析)、需要在特定条件下才能工作(无遮挡、有纹理)
-
3、相机
-
分类:
-
单目 Monocular
-
双目 Stereo
-
深度 RGBD
-
其他 鱼眼、全景 、Event Camera
-
-
本质:以二维投影形式记录了三维世界的信息,丢掉了深度信息。
-
各类相机区别:有没有深度信息
-
单目:没有深度,必须通过移动相机产生深度(近处物体像运动快,远处物体运动慢),并且无法确定真实尺度
-
双目:通过视差计算深度(通过左右眼的差异,可以判断场景中物体离相机距离)
-
RGBD:通过物理方法测量深度(主从测量功耗大,深度值较准确,量程小红外光室外容易受干扰,主要用于室内)
-
共同点:利用图像和场景的几何关系,计算相机运动和场景结构;三维空间的运动和结构;图像来自连续的视角
-
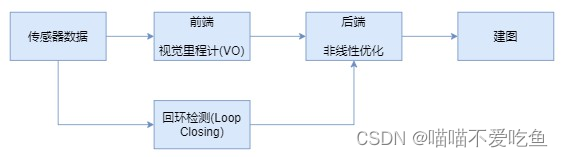
4、视觉SLAM模型
-
视觉里程计(Visual Odometry):
-
相邻图像估计相机运动
-
基本形式:通过两张图像计算运动和结构
-
不可避免有漂移问题,局部估计累加,随着误差累积,存在不准的问题
-
方法:特征点法 第七讲;直接法 第八讲
-
-
后端优化
-
从带有噪声的数据中优化估计和地图 状态估计问题
-
最大后验概率估计 MAP
-
方法:迁移以EKF(ExtendedKalmanFilter)为代表,想在以图优化为代表 第十、十一讲
-
-
回环检测
-
检测机器人是否回到早先位置,全局校正
-
识别到达过的场景
-
计算图像间的相似性
-
方法:词袋模型 第十二讲
-
-
建图
-
用于导航、规划、通讯、可视化、交互等
-
度量地图(强调精确标识地图中物体的位置关系) vs 拓扑地图(强调地图元素之间的关系)
-
度量地图分类:稀疏地图(由路标组成) vs 稠密地图(着重建模所有看到的东西)
-
-
第十三讲
-
-
SLAM问题的数学描述
-
离散时间: t=1,2,...,k
-
萝卜位置:x1,x2,...xk (看成随机变量,服从概率分布)
-
萝卜是从上一时刻运动到下一时刻的,其运动方程:
,
为输入,
为噪声
-
路标(三维空间点,萝卜每个时刻观测到的东西):y1,y2,...yn东西
-
传感器在位置xk处观测到了路标yj,观测方程:
,v_{k,j}是噪声
-
问题:位置是三维的,如何表述?(第三、四讲);观测是相机中的像素点,如何表述(第五讲);已知u,z,如何推断x,y(第六讲)
-















 1310
1310

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









