







1.首先打开树莓派的I2C接口
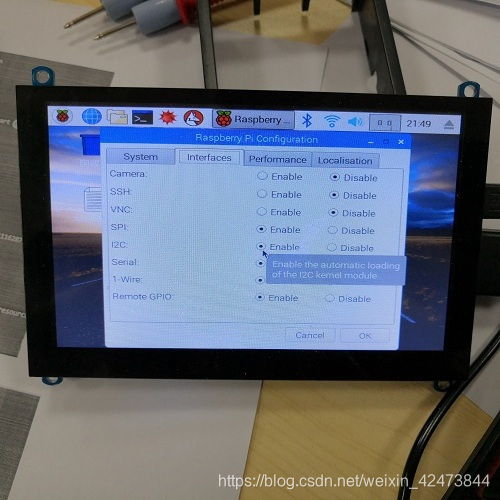
然后重新启动设备
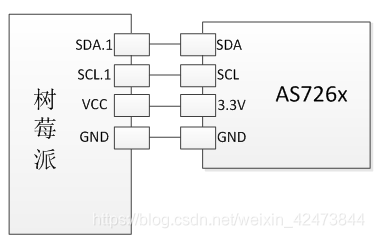
2. 根据树莓派的引脚图连接as726x芯片的引脚
树莓派引脚图

树莓派与AS726x芯片的连接示意图
3. 树莓派查询as726x芯片的地址
在连接好硬件电路的情况下,在树莓派的terminal中执行命令sudo i2cdetect -y 1查询i2c设备的地址
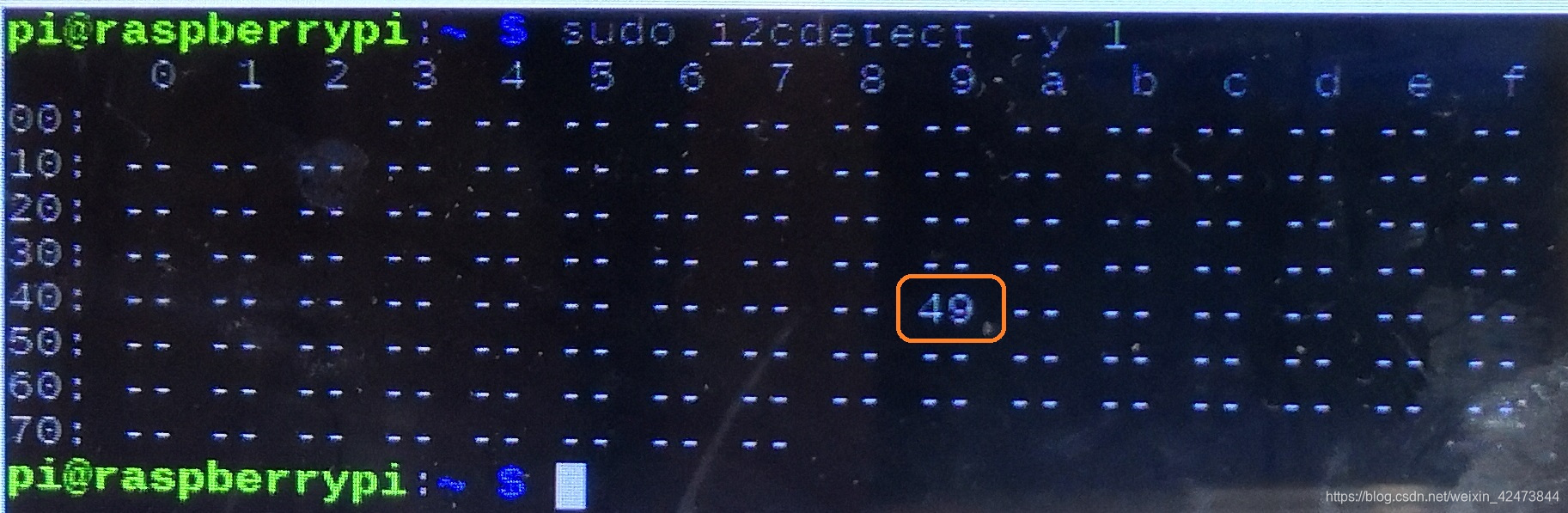
芯片as726x的i2c寄存器的地址位0x49
4. 编辑python脚本获取寄存器中的数据
import smbus
import time
def dat_get():
bus = smbus.SMBus(1)
addr = 0x49
dict = {
0x70: 0x8A, #Device Config 1 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









