







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
提示:这里可以添加本文要记录的大概内容:
参考书《Nonlinear dynamics and chaos》 Steven H. Strogatz
本节重点Note第三章3.0-3.1内容,包括分岔概念引入和鞍点分岔,图片来自于该书
C3 分岔(bifurcation)
3.0 引入
一维动力学只有到平衡位置(不动点)和趋向 ± ∞ \pm \infty ±∞这两种情况。现在我们讨论一个重要的问题就是解的参数依赖性。随着参数的改变,我们可以产生或者消灭不动点,或者引起不动点稳定性的改变,而这种定性的改变叫做分岔,而引起这种改变的参数值叫做分岔点. 也就是说,通过改变控制参数,会引起相变和不稳定性。
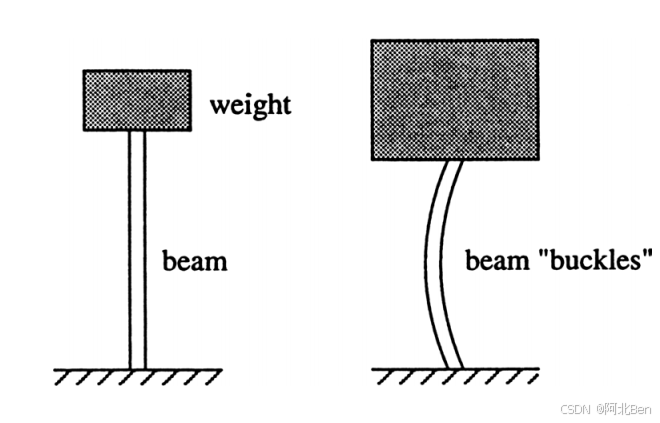
例如在下面的场景中,梁上的重物的重量就是一个会引起状态改变的参数,当重力大时,梁在垂直方向上会不稳定。
3.1 鞍点分岔(saddle point bifurcation)
鞍点分岔,一个不动点产生/破坏的机理,通过调整控制参数,两个不动点会碰撞。
鞍点分岔的标准型(Normal forms)如下:
x ˙ = r + x 2 ( 1 ) \dot{x} = r +x^2\quad{(1)} x˙=r+x2(1) 或 x ˙ = r − x 2 ( 2 ) \dot{x}=r-x^2\quad{(2)} x˙=r−x2(2)
r r r是一个参数,可以取正负或0,我们考虑方程(1)
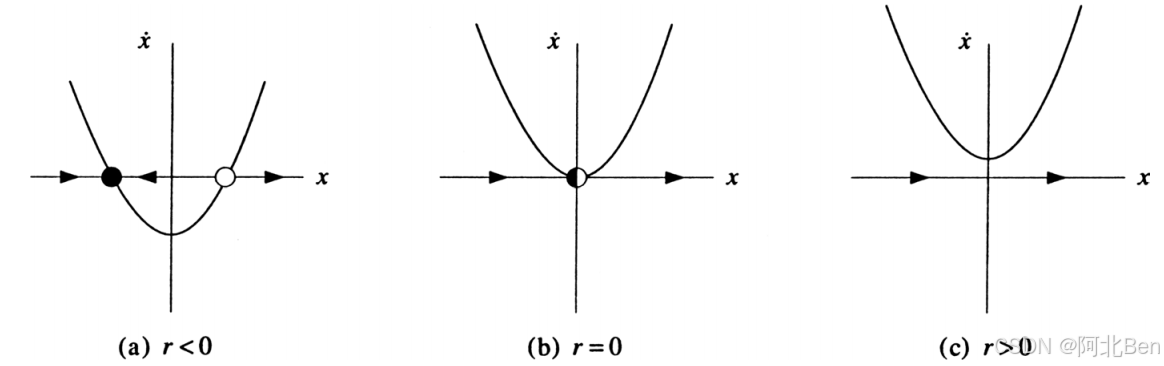
当 r r r为负数时候,有两个不动点,其中一个是稳定的(unstable),另一个是不稳定的(unstable). 当 r r r趋近于0时,曲线上移导致两个不动点相向运动. 两个不动点碰撞并且聚合成为一个半稳定(half-stabel fixed point)的不动点. 当 r > 0 r>0 r>0时,这个不动点会消失。
因此在这个例子中分岔发生在 r = 0 r=0 r=0
且 r < 0 r<0 r<0和 r > 0 r>0 r>0的向量场显著不同。
我们如果只画 x x x轴也可以得到如下图:
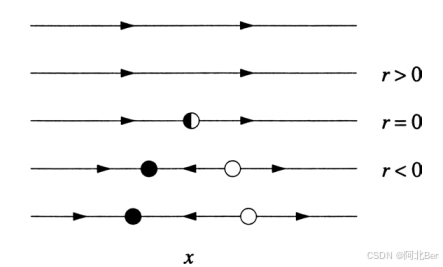
该图强调了不动点对参数 r r r的依赖性。
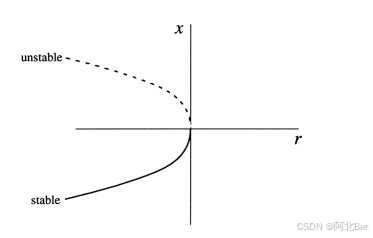
我们以 r r r为y轴,可以得到如下图:
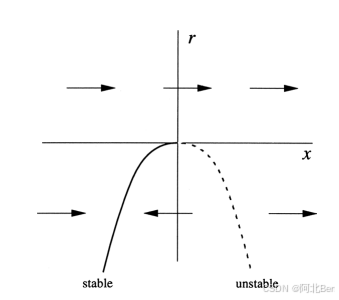
其中 r = − x 2 r=-x^2 r=−x2.为了在图中分辨稳定不动点和不稳定的不动点,我们用实线表示稳定的不动点,用虚线表示不稳定的不动点.
我们也可以调换x和r的位置得到如下分岔图:
例3.1.2
控制方程如下: x ˙ = r − x − e − x \dot{x} = r-x-e^{-x} x˙=r−x−e−x随着 r r r的改变鞍点的 r r r会改变.
我们可以画出 r − x r-x r−x和 e − x e^{-x} e−x的图, 我们可以发现有两曲线有两交点,一个交点和没有交点三种情况
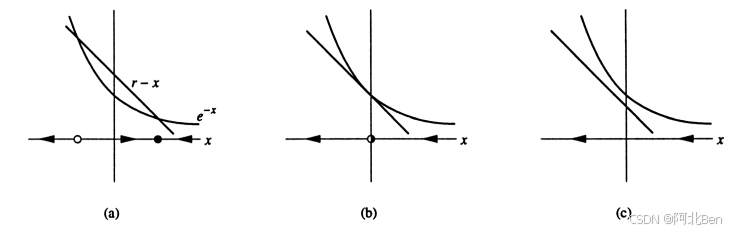
分岔发生在两曲线相切的情况,此时不动点位置两函数的值和切线均相等,即 r − x = e − x r-x=e^{-x} r−x=e
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6556
6556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









