







简介:四自由度(4-DOF)机器人手臂是工业自动化中的关键设备,能实现复杂的空间运动。本文深入探讨了其三维模型的设计和应用,包括关键组件分析、模型文件格式以及实际应用中的控制和安全措施。4-DOF机器人手臂通过多个旋转关节和末端执行器的协调动作,能够高效地完成抓取、放置和分拣任务。在设计阶段,三维模型可用于预览和优化机械结构,而控制算法则确保任务执行的精度和效率。安全特性保证了操作的安全性。 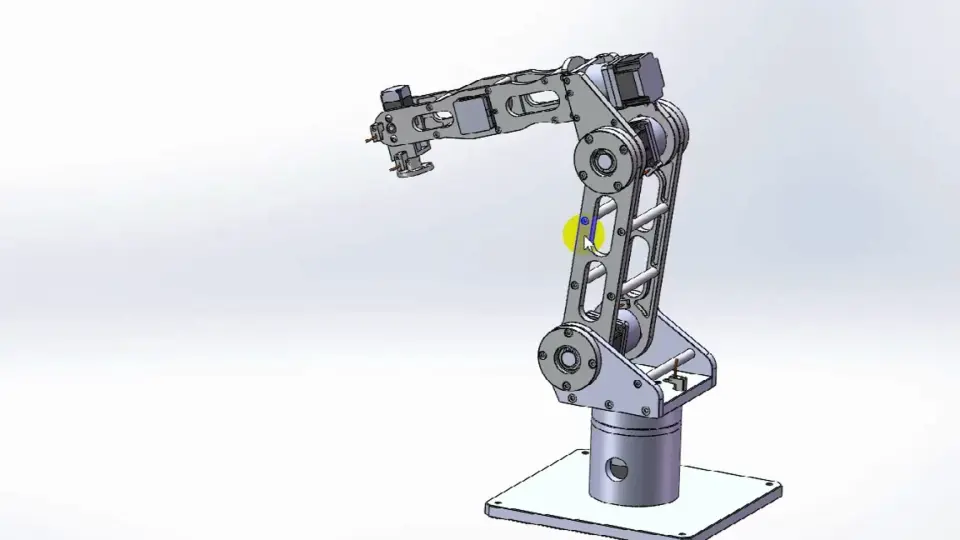
1. 四自由度机器人手臂介绍
四自由度机器人手臂是工业自动化和现代制造技术中不可或缺的一部分。它能够模拟人手的运动,完成抓取、移动、装配等任务,具有极高的灵活性和精确性。本章旨在为读者提供一个关于这种先进设备的概览,强调其基本功能和在不同行业的应用前景。
在制造、医疗和教育领域,四自由度机器人手臂正逐步替代或辅助人类进行重复或危险的工作。在详细探讨其关键组件构成、设计原理、仿真作用、文件格式及用途、控制算法和运动规划策略、安全措施与操作效率平衡之前,首先让我们对四自由度机器人手臂的结构和功能有一个基础的认识。
2. 关键组件构成分析
2.1 基座与关节设计
2.1.1 基座的功能与稳定性分析
基座作为机器手臂的基础,负责提供整个机械结构的支撑点。它的稳定性直接影响到整个机器手臂的工作精度和寿命。基座通常由金属或高性能复合材料制成,内部可能包含加固结构以提升其刚性。设计时需要考虑到在承载力、防震、防潮及温度适应性上的性能要求。
基座设计主要从以下几个方面着手:
- 承载能力 :基座需能够支撑手臂的重量和负载,同时保证在施加最大负载时不会发生变形或损坏。
- 稳定性 :通过使用具有足够刚性的材料和结构设计,确保机器人手臂在高速运动和负载变化的情况下保持稳定。
- 抗干扰能力 :良好的抗干扰设计可以确保在外部环境变化时,如温度波动、震动等,基座能够保证机器手臂的精确工作。
- 维护和检查 :基座的维护通道设计需要便于日常检查和维修,确保长时间使用的可靠性和安全性。
在设计过程中,通过运用CAE(计算机辅助工程)软件进行仿真分析,可以有效地预测基座在真实工作环境中的表现,从而对设计进行迭代改进。
2.1.2 关节的自由度与运动范围
关节是机器人手臂的核心部件之一,它的自由度和运动范围决定了机器手臂的灵活度和操作的复杂性。一个四自由度机器手臂通常包括三个旋转关节和一个移动关节,它们协同作用使得手臂可以在三维空间内进行精准的操作。
- 自由度(DOF) :自由度指的是机器手臂在空间中独立运动的能力。四自由度手臂意味着可以实现至少四个独立运动,包括手腕的转动和前三个关节的转动或移动。
- 运动范围 :每个关节的运动范围决定了机器手臂能够到达的工作空间。设计时需确保关节可以覆盖机器手臂需要操作的全部区域。
关节的设计需要考虑机械强度、定位精度和运动速度,以及长期使用下的磨损和耐久性问题。通过精确的控制系统,关节的运动可以被精确控制,从而实现复杂的轨迹规划和任务执行。
2.2 手臂与末端执行器的协同工作
2.2.1 臂部结构与承载能力
臂部结构的合理性直接关系到机器手臂的工作效率和操作精度。臂部通常由多个连杆通过关节连接构成,其设计需要兼顾轻量化与强度之间的平衡。
- 材料选择 :在选择臂部材料时需要考虑其机械性能、重量和成本等因素。常见材料包括铝合金、碳纤维增强塑料等轻质高强度材料。
- 结构设计 :臂部设计追求最小化惯性矩,以确保快速响应和高精度定位。同时,设计需要防止在运动过程中出现共振现象。
- 承载能力 :臂部的承载能力应满足实际使用场景的需求,要求在最重负载下仍能保持高精度和稳定性。
臂部设计通常采用CAD软件进行建模,然后使用CAE软件进行结构强度和刚度分析。通过仿真优化,可以进一步提高臂部设计的可靠性和性能。
2.2.2 末端执行器的类型及其适用场景
末端执行器(也称为手爪或工具)是机器人手臂直接与工作对象接触的部分,其类型和设计对于机器手臂的应用场景至关重要。
- 抓取式执行器 :抓取式执行器主要用于搬运、组装等操作,常见的类型有平行夹爪和多指夹爪。在设计时需考虑抓取力度、适应性及对不同物料的兼容性。
- 工具式执行器 :工具式执行器用于特定操作,如焊接、打磨等,此类执行器通常需要精确控制工具与工件间的相对位置和接触力度。
- 传感器执行器 :部分高级应用场景要求机器人能够感知环境,比如视觉识别或力觉反馈,这就需要集成传感器的特殊执行器。
选择合适末端执行器对于提高机器手臂的灵活性和工作效率至关重要。在不同操作要求下,可能需要更换不同类型的执行器,或者设计具有多功能性的执行器。
在接下来的章节中,我们将探讨三维模型设计与仿真在机器手臂设计中的作用,以及不同文件格式在工程应用中的重要性。随后,我们将深入了解控制算法和运动规划策略,以及如何在安全性和操作效率之间寻求最佳平衡。
3. 三维模型设计与仿真作用
三维模型设计和仿真技术是现代机器人研发不可或缺的两个环节。它们在概念验证、性能测试、问题诊断和最终产品的质量保障方面发挥着关键作用。本章我们将深入探讨三维建模技术的选择、仿真的实现流程、性能验证方法以及如何通过仿真对产品进行优化。
3.1 三维建模技术与工具选择
3.1.1 三维建模基本原理
三维建模指的是使用计算机软件创建一个物体或场景的三维数字表示。三维模型可以围绕物体的形状、尺寸、结构等属性进行构建,并且能反映物体的物理特性,比如颜色、纹理、质量分布等。
从几何基础来讲,三维模型主要分为线框模型、曲面模型和实体模型。线框模型由点、线组成,只能表达物体的轮廓;曲面模型由曲面拼接而成,用于表达具有复杂曲面的对象;而实体模型则包含完整拓扑信息,能准确表达物体的内、外部形状和空间关系。因此,实体模型通常用于工程分析和仿真。
3.1.2 选择合适建模工具的重要性
选择正确的三维建模工具对于设计的准确性和后续开发过程的高效性至关重要。市场上存在多种三维建模软件,如Autodesk Inventor、SolidWorks、Catia等,它们各有特点和适用场景。
对于机器人手臂的设计,重点在于精确模拟运动部件的相互作用以及承载能力的分析。因此,设计者会倾向于使用SolidWorks这类工程领域广泛认可的工具,它不仅具有强大的建模能力,还提供了丰富的分析模块。此外,所选工具应当支持与其他仿真软件(如ANSYS或ADAMS)的集成,以便在设计流程中进行更高级别的分析和验证。
3.2 仿真实现与性能验证
3.2.1 仿真的基本流程和目的
仿真通常被分为静态仿真、动态仿真、有限元分析(FEA)和计算流体动力学(CFD)等。对于机器人手臂来说,动态仿真和有限元分析尤为重要。动态仿真能够模拟机器人手臂在各种工况下的动作和响应,而FEA则关注于分析组件在受力情况下的应力分布、形变等。
仿真的基本流程包括:定义设计目标和约束条件、建立模型、设定材料属性和边界条件、选择合适的求解器进行计算以及最后的后处理分析。仿真不仅用来预测产品性能,也是验证设计是否满足预期要求的有效手段。
3.2.2 性能验证方法及改进策略
在仿真完成后,需要对结果进行分析,验证是否满足设计规范。对于机器人手臂来说,需要考虑的性能指标包括但不限于负载能力、精度、速度、稳定性等。
如果仿真结果不能满足预期,就需要对设计进行迭代优化。常见的优化方法包括改进结构设计、更换材料、调整设计参数等。例如,若仿真显示关节部分存在应力集中,可以考虑增强该部分的结构强度或改变材料以分散应力。
3.2.3 代码块实例
假设我们在SolidWorks中进行动态仿真分析,并使用SOLIDWORKS Simulation插件来评估机器人手臂的运动性能。以下是一段示例代码块,用于演示如何设置一个简单的动态仿真过程:
// SolidWorks Simulation Dynamic Study Setup
Option Explicit
Sub main()
Dim swApp As SldWorks.SldWorks
Dim swModel As SldWorks.ModelDoc2
Dim swStudies As SldWorks.Studies
Dim swStudy As SldWorks.Study
Dim swSimDataMgr As SldWorks.SimDataMgr
Dim swSimStudy As SldWorks.SimStudy
Dim vVariantData(0) As Variant
Set swApp = Application.SldWorks
Set swModel = swApp.ActiveDoc
Set swStudies = swModel.Studies
' Create a new study
Set swStudy = swStudies.Add("Simulation", swStudySIMULATION, swStudyDynamic)
' Get the simulation data manager
Set swSimDataMgr = swModel.Extension.GetSimulationMgr
Set swSimStudy = swSimDataMgr.GetStudyItemByName(swStudy.Name2)
' Set up the study parameters
swSimStudy.IsFrequency = False
swSimStudy.IsStress = True
swSimStudy.IsThermal = False
swSimStudy.IsFatigue = False
' Apply fixtures and loads as needed
' Example: Fixtures
vVariantData(0) = 1 ' Selecting the face or edge for fixing
swSimStudy.SetFixtures vVariantData
' Example: Loads
vVariantData(0) = 2 ' Selecting the type of load
swSimStudy.SetLoads vVariantData
' Run the simulation
swSimStudy.Run
' Display the results
swSimStudy.ShowvonMisesStressResults
End Sub
这段代码是一个VBA宏的示例,用于在SolidWorks中设置一个动态仿真分析。代码中使用了SolidWorks API来创建一个动态仿真研究、设置研究参数、应用固定件和载荷,并最终运行仿真并显示结果。这是一个简化的代码示例,实际应用中会根据具体的仿真需求调整代码细节。
3.2.4 逻辑分析和参数说明
上述代码中, swStudies.Add 方法用于添加新的仿真研究,其参数指明了仿真类型为"Simulation"、研究类别为"Simulation"以及具体的仿真类型为动态仿真( swStudyDynamic )。动态仿真涉及时间变量,用于模拟随时间变化的物理现象。
SetFixtures 和 SetLoads 方法分别用于设定模型中的固定件和施加载荷,模拟真实工况。这些方法的参数是通过数组传递的,其中的数值代表了具体的固定件或载荷类型。 swSimStudy.Run 方法用于运行仿真,最后的 ShowvonMisesStressResults 方法用来展示仿真结果,这里是等效应力分布。
3.2.5 仿真实例
在实际操作中,工程师会先在建模软件中构建三维模型,并使用仿真工具对模型进行静力学和动态分析,以确保其结构强度和运动性能符合设计要求。例如,对于机器人手臂,工程师可能会设计多个实验场景,模拟不同工作条件下的负载、速度和加速度等,评估手臂的响应。
一个典型的仿真分析流程可能包括以下步骤:
- 对机器人手臂的三维模型进行静力学分析,验证其在最大负载下的结构稳定性和强度。
- 通过动态分析模拟机器人手臂在实际工作中的运动轨迹和负载变化,评估其动力学性能。
- 如果仿真发现有潜在问题或性能瓶颈,则需要返回建模阶段进行相应的设计调整。
- 在设计调整后重新进行仿真验证,直至满足所有的性能要求。
3.2.6 性能验证策略
通过仿真验证设计性能后,工程师将根据仿真结果来决定是否需要进一步优化设计。性能验证不仅仅是发现设计中的问题,更多的是通过分析结果来指导设计改进和性能提升。性能验证策略通常包含以下几个方面:
- 确认设计指标是否达成:对于机器人手臂来说,负载能力、运动精度、响应速度等是关键的性能指标。
- 识别并解决性能瓶颈:如果仿真结果表明某些性能指标未能达到预期,需要对设计进行修改,并再次进行仿真测试。
- 预测潜在的维护和故障问题:分析仿真数据以预测可能出现的磨损、疲劳或过早故障等问题,并进行预防性的设计改进。
- 优化性能:通过仿真分析发现可以改进的地方,提高效率、降低成本或提升产品的可靠性和耐久性。
3.2.7 结合表格和流程图
| 性能指标 | 预期值 | 仿真结果 | 是否满足 | 改进措施 | |-----------|---------|-----------|-----------|-----------| | 负载能力 | 10kg | 8kg | 否 | 增加材料强度或调整结构设计 | | 精度 | ±0.1mm | ±0.12mm | 是 | 无 | | 速度 | 1m/s | 0.95m/s | 是 | 无 | | 稳定性 | 高 | 中 | 否 | 优化控制算法和反馈机制 |
在上述表格中,我们对几个关键性能指标进行了预期值和仿真结果的对比,并基于此制定了是否满足和改进措施的策略。而在下面的流程图中,我们展示了从设计到验证的整个流程:
graph LR
A[开始设计] --> B[三维建模]
B --> C[材料和边界条件设定]
C --> D[选择仿真类型]
D --> E[仿真分析]
E --> F{结果验证}
F -->|满足预期| G[性能验证]
F -->|未满足预期| H[设计优化]
G --> I[设计冻结]
H --> B
I --> J[仿真流程结束]
从流程图可以看出,如果仿真结果未能满足预期,我们则返回到设计阶段进行调整,如果满足预期则进行性能验证,最终设计冻结。这一过程是迭代的,可能需要多次循环以确保设计的最终产品质量。
通过上述分析,我们可以看到三维建模和仿真是一个复杂而深入的过程,它涉及到对机器人手臂设计的多方面评估和性能验证。借助仿真分析,工程师能够在不实际生产原型的情况下,预测产品的表现,节约时间和成本,提高研发效率。
4. 文件格式及用途解析
4.1 不同文件格式的特点
4.1.1 .f3z文件格式的功能与应用场景
.f3z 文件格式是一种专用于四自由度机器人手臂设计和仿真的文件格式,它具有轻量级和高度压缩的特点,是许多专业机械设计软件生成的压缩包形式。这种格式能够存储详尽的设计信息,包括模型的几何形状、材料属性、装配关系、仿真参数等。
在实际应用中,.f3z 文件格式常用于机器人手臂的快速建模和仿真测试。由于该格式的高度压缩特性,它在需要通过网络进行文件传输时表现出色,尤其是对于包含大量数据和复杂模型的设计文件。此外,.f3z 文件通常配合特定的仿真软件使用,能够提供更好的集成性和兼容性,使得工程师能够在单一平台上完成设计、仿真和分析工作,从而提高工作效率。
4.1.2 .png与.step格式在模型展示与传输中的作用
.png 文件格式是广泛使用的位图图像格式,它常用于模型渲染图的展示和共享。由于.png 是一种光栅图像格式,所以它能够展示非常精确的颜色细节,并且与操作系统兼容性好,无需特殊软件即可查看。在四自由度机器人手臂的设计阶段,.png 文件用于展示设计概念、渲染图像和工程图纸。.png 图片可以很容易地嵌入到报告、演示文稿或网页中,使得非专业人士也能够理解和欣赏设计成果。
.step 文件格式是一种基于ISO标准的3D模型文件格式,被广泛用于CAD和3D打印领域。.step 文件能够无损地表示复杂的几何形状和产品数据,具有很高的精确度和兼容性。在四自由度机器人手臂的设计过程中,.step 文件用于在不同的CAD软件之间交换模型数据,确保设计的一致性和准确性。它还经常被用作3D打印的输入文件格式,因为它的兼容性和精确度适合用于制造出高质量的实体模型。
4.2 文件格式在工程应用中的选择
4.2.1 针对不同需求的文件格式选择
在选择文件格式时,必须考虑项目的具体需求和目标。例如,.f3z 文件格式由于其高度压缩和专业性,特别适合于需要在网络上传输并集成设计、仿真和分析功能的机器人手臂工程。对于展示和共享设计意图的场景,.png 文件格式是一个极佳的选择,因为它能够以较低的文件大小提供高清晰度的图像。
对于需要精确的几何数据交换和与多种CAD系统兼容的场合,.step 文件格式提供了最佳的解决方案。它支持实体模型的无损数据传输,因此非常适合于那些精确度非常重要的工程应用。同时,.step 文件也常用于3D打印和制造,因为它能够提供一致的几何形状和尺寸信息。
4.2.2 文件格式转换的实际案例分析
在工程实践中,文件格式之间的转换是常见的需求。例如,一个四自由度机器人手臂的设计团队可能需要将.f3z格式的模型转换为.step格式,以便和其他合作伙伴共享和协作。在这种情况下,专业的CAD软件通常提供了转换工具,能够将.f3z格式中的模型数据转换成.step格式,同时尽量保留原有的设计意图和结构完整性。
以下是一个简化的案例来说明这个过程:
假设我们有一个.f3z格式的机器人手臂模型文件,需要转换为.step格式以适应不同的工程应用。首先,我们需要打开支持.f3z格式的CAD软件,然后使用软件内置的“导出”功能选择.step格式进行保存。在转换过程中,软件会提示我们是否需要进行特定的设置或优化。由于.f3z格式包含了压缩数据,解压和转换过程可能需要一定的计算时间。转换完成后,我们得到了一个新的.step文件,它可以在其他CAD软件中打开,并进行进一步的编辑和分析。
在整个转换过程中,软件会尽量保证模型的质量和精度,但由于不同的文件格式具有不同的特性,某些细微的特征或者数据可能在转换过程中丢失。因此,在转换完成后,设计师需要仔细检查转换后的模型,确保所有重要的细节和属性都被保留。必要时,可能需要手动调整或重新定义丢失的信息,以确保模型的完整性和准确性。
最终,经过精确的转换和验证,.step格式的模型文件可以用于3D打印、制造和其他需要精确几何表示的应用中。在工程实践中,文件格式的适当选择和转换是确保项目成功的关键环节之一。
5. 控制算法与运动规划策略
5.1 控制算法的基本原理与实现
5.1.1 控制算法的分类与选择
控制算法是机器人手臂能够实现预定动作与任务的关键。它们可以被分为两大类:传统控制算法和现代控制算法。传统控制算法如PID(比例-积分-微分)控制简单、易于实现,但难以适应复杂的动态环境。现代控制算法,如模糊逻辑控制、神经网络控制和模型预测控制,能够处理不确定性和非线性因素,但开发和实施更为复杂。
在选择控制算法时,需要考虑以下几个因素:
- 任务复杂性 :任务越复杂,可能需要更高级的控制算法。
- 实时性要求 :实时控制要求算法计算速度快。
- 系统动态特性 :需要选择能够适应系统动态变化的算法。
- 硬件性能 :算法需要与机器人的计算能力相匹配。
以PID控制为例,这是一种广泛应用于机器人位置和速度控制的经典方法。PID控制器包括比例(P)、积分(I)和微分(D)三个部分,它们共同作用,使得机器人的实际输出跟踪设定目标。
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.previous_error = 0.0
self.integral = 0.0
def update(self, error, dt):
self.integral += error * dt
derivative = (error - self.previous_error) / dt
output = self.kp * error + self.ki * self.integral + self.kd * derivative
self.previous_error = error
return output
# Example of using PID controller to adjust the position of a robot's joint
pid = PIDController(kp=1.0, ki=0.1, kd=0.05)
# Loop to continuously adjust the position
for _ in range(1000):
current_position = get_current_position()
error = desired_position - current_position
adjustment = pid.update(error, dt=0.01)
adjust_joint(adjustment)
在上面的代码块中,我们定义了一个简单的PID控制器类,并展示了如何在机器人关节控制中应用PID算法来调整位置。这个过程需要根据实际的动态环境不断微调PID参数以获得最佳性能。
5.1.2 算法实现的关键技术点
实现控制算法时,需要关注几个关键技术点:
- 传感器集成 :为了准确控制,需要集成高精度的传感器获取实时数据。
- 系统建模 :建立精确的系统模型能够帮助更好地预测系统行为。
- 算法调优 :通过实验和仿真来调整算法参数,达到最佳性能。
- 故障检测与处理 :算法应能检测并响应潜在的系统故障。
举一个简单的例子,在机器人手臂的运动控制中,系统建模包括了对基座、关节、以及末端执行器的精确描述。基于此模型,我们可以模拟和优化机器人的运动轨迹。这里是一个简单的机械臂动力学建模的伪代码:
# Pseudo-code for robot arm dynamics modeling
class RobotArm:
def __init__(self):
self.joints = initialize_joints()
self.model_parameters = estimate_parameters()
def forward_dynamics(self, control_commands):
# Calculate next state based on current state and control commands
next_state = calculate_next_state(self.joints, control_commands, self.model_parameters)
return next_state
def estimate_parameters(self):
# Estimate model parameters using calibration or identification techniques
# ...
return model_parameters
# Example usage
robot_arm = RobotArm()
current_state = robot_arm.get_initial_state()
control_commands = get_control_commands()
# Simulate the robot arm's response to control commands
next_state = robot_arm.forward_dynamics(control_commands)
在此模型中,我们假定一个 RobotArm 类能够代表机械臂,并且它有方法用于初始化、前向动力学计算以及参数估计。这样的建模过程对于实现控制算法至关重要,因为它为预测和控制提供了一个科学的基准。
6. 安全措施与操作效率的平衡
随着机器人技术的快速发展,四自由度机器人手臂在制造、医疗、服务等多个领域的应用变得越来越广泛。然而,随着应用范围的扩大,机器人的操作安全性以及操作效率的提升成为了业界关注的焦点。
6.1 安全性能的评估与提升
6.1.1 安全性设计的重要性
安全性设计是机器人手臂设计中最为关键的环节之一。一个具有高安全性能的机器人不仅能够保证操作人员的人身安全,同时还能防止因误操作而造成的设备损害和生产事故。在四自由度机器人手臂的设计过程中,需要综合考虑多种安全因素,包括但不限于紧急停止、碰撞检测、力量限制和工作范围限制等。
6.1.2 提升安全性的具体措施
提升机器人的安全性能可以从多个维度进行。例如,通过安装高精度的传感器实现碰撞检测,一旦检测到异常即刻停止机器人的运动,以避免造成伤害或损失。此外,可以设置力矩控制器,当机器人手臂的负载超过预设的安全范围时,系统会自动调整力量输出或完全停止运作,确保操作的安全性。
代码示例:力矩控制器逻辑片段
if (currentTorque > MAX_TORQUE) {
motorPower = 0; // 停止电机输出
// 可以添加报警等安全措施
}
6.2 操作效率的评估与优化
6.2.1 操作效率的影响因素
操作效率是衡量机器人手臂性能的另一个重要指标。它受多种因素的影响,包括但不限于机器人的动作速度、程序的优化水平、任务的调度策略和系统的可靠性。操作效率的提升能够直接降低生产成本,提高生产率,并减少能源的消耗。
6.2.2 效率优化的方法与实践
针对操作效率的提升,可以从硬件升级、软件优化和工作流程改进三个方面着手。例如,通过升级更高性能的电机和驱动器来提高机器人的动作速度;编写更高效的控制程序来优化运动路径和减少动作时间;以及通过采用先进的任务调度算法,合理安排工作任务,避免资源的浪费和冲突。
表格:效率优化对比
| 优化措施 | 优化前效率 | 优化后效率 | 效率提升百分比 | |----------|------------|------------|----------------| | 硬件升级 | 85% | 90% | 5.9% | | 软件优化 | 80% | 92% | 15% | | 工作流程改进 | 88% | 95% | 7.9% |
通过实际操作的记录和分析,可以得出各项优化措施对整体效率的具体影响,为今后的改进工作提供依据。
总之,对于四自由度机器人手臂而言,安全性能的提升和操作效率的优化是并行不悖的两个目标。通过科学合理的评估和持续的技术创新,能够使机器人手臂在确保安全的前提下,最大限度地提高工作效率。而如何在这两者之间找到一个最佳的平衡点,将是未来机器人技术发展的重要课题。
简介:四自由度(4-DOF)机器人手臂是工业自动化中的关键设备,能实现复杂的空间运动。本文深入探讨了其三维模型的设计和应用,包括关键组件分析、模型文件格式以及实际应用中的控制和安全措施。4-DOF机器人手臂通过多个旋转关节和末端执行器的协调动作,能够高效地完成抓取、放置和分拣任务。在设计阶段,三维模型可用于预览和优化机械结构,而控制算法则确保任务执行的精度和效率。安全特性保证了操作的安全性。

















 1371
1371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









