







 本文详细介绍了相机标定的过程,包括相机畸变校正、坐标系转换和参数计算。通过实验,展示了从世界坐标系到像素坐标系的转换,并分析了误差来源。在实验中使用了MATLAB和OpenCV,揭示了相机内外参数的重要性以及在实际应用中的挑战。
本文详细介绍了相机标定的过程,包括相机畸变校正、坐标系转换和参数计算。通过实验,展示了从世界坐标系到像素坐标系的转换,并分析了误差来源。在实验中使用了MATLAB和OpenCV,揭示了相机内外参数的重要性以及在实际应用中的挑战。
计算机视觉第五次实验——相机标定盘格标定法
文章目录
标题一,背景
一个是由于每个镜头的在生产和组装过程中的畸变程度各不相同,通过相机标定可以校正这种镜头畸变,生成矫正后的图像——矫正透镜畸变;
另一个是根据标定后的到的相机参数建立相机成像几何模型,由获得的图像重构出三维场景。具体来说:当我们用摄像机拍照时,从照片里得到一些空间信息(比如距离,尺寸等),是要利用二维图像得到三维信息。我们拍照的时候把空间物体信息通过摄像机变成了二维图像,这个过程本来是不可逆的。但如果我们可以找到一个摄像机的数学模型,就可以 :从二维图像+模型逆推得到原来三维信息。标定就是在找这个模型。
二、相机标定可以做什么?
1、相机在出厂之前都需要进行相机标定,用软件的方法校正生成的图像,避免拍摄出的图像产生桶形和枕形畸变;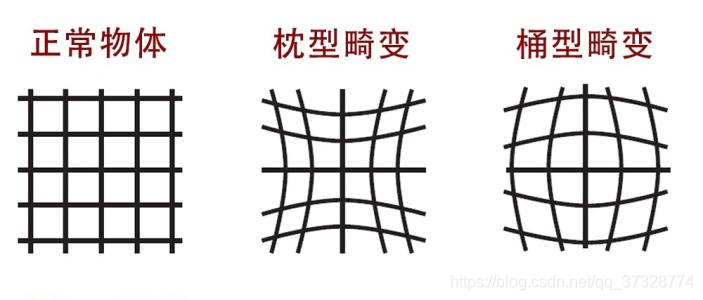
2、根据相机成像的几何模型,将世界坐标系中的3D物体映射到2D成像平面上;
3、求解多个相机对之间的映射关系
三、基本原理
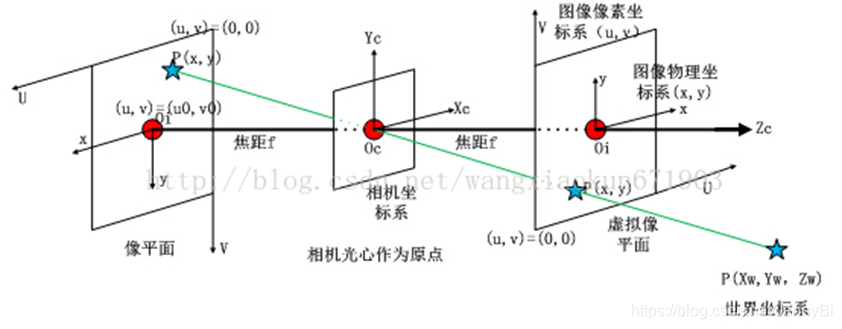
1、四个坐标系:
2、世界坐标系(world coordinate system):用户定义的三维世界的坐标系,为了描述目标物在真实世界里的位置而被引入。单位为m。
相机坐标系(camera coordinate system):在相机上建立的坐标系,为了从相机的角度描述物体位置而定义,作为沟通世界坐标系和图像/像素坐标系的中间一环。单位为m。
图像坐标系(image coordinate system):为了描述成像过程中物体从相机坐标系到图像坐标系的投影透射关系而引入,方便进一步得到像素坐标系下的坐标。 单位为m。
像素坐标系(pixel coordinate system):为了描述物体成像后的像点在数字图像上(相片)的坐标而引入,是我们真正从相机内读取到的信息所在的坐标系。单位为个(像素数目)。
3、从世界坐标系到相机坐标系 3D->3D
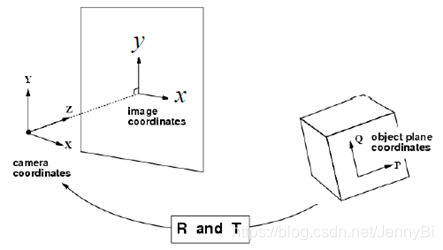
其中,R为旋转矩阵,t为平移向量,因为假定在世界坐标系中物点所在平面过世界坐标系原点且与Zw轴垂直(也即棋盘平面与Xw-Yw平面重合,目的在于方便后续计算),所以zw=0,可直接转换成式1的形式。其中变换矩阵
即为前文提到的外参矩阵,之所称之为外参矩阵可以理解为只与相机外部参数有关,且外参矩阵随刚体位置的变化而变化。
4、从相机坐标系到理想图像坐标系(不考虑畸变) 3D->2D
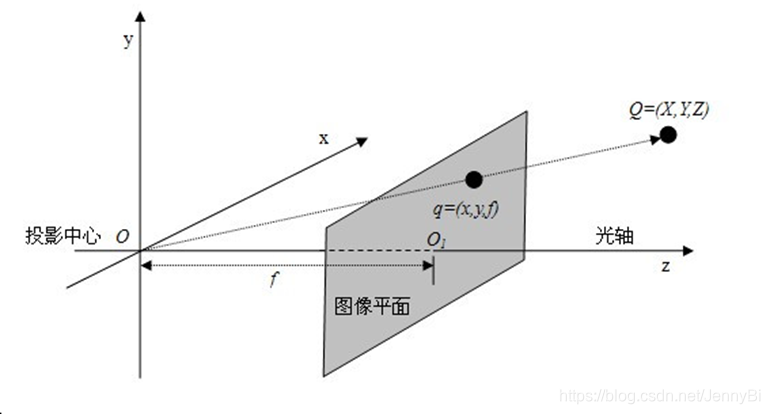
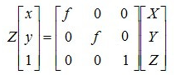
这一过程进行了从三维坐标到二
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 941
941











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









