






 本文介绍了如何在STK中使用矢量组件对卫星姿态、速度、传感器指向等进行3D可视化,包括默认矢量、自定义矢量、坐标平面和姿态球面的展示,以及如何计算和观察不同坐标系下的相对角度。
本文介绍了如何在STK中使用矢量组件对卫星姿态、速度、传感器指向等进行3D可视化,包括默认矢量、自定义矢量、坐标平面和姿态球面的展示,以及如何计算和观察不同坐标系下的相对角度。
–
内容简介
接下来一系列文章将进行STK目标(卫星、导弹、火箭、飞机、船舶)姿态分析的仿真。本篇将使用矢量(vector)组件对卫星姿态、传感器指向等进行3D可视化。后续将对STK常见中心体(地球)坐标系、载体坐标系、姿态设置、矢量工具进行学习。
STK 插入目标后,其3D Graphics—vector属性中包含轴(Axes)、点(Points)、坐标系(Vector)、角度(Angles)和平面(Planes)组件,通过设置这些附加在目标上的组件,可以在视图中三维显示目标当前状态。
以卫星为例,对卫星运行中的实时速度矢量、载体坐标系、姿态球面、相对角度等进行显示。
一、卫星矢量
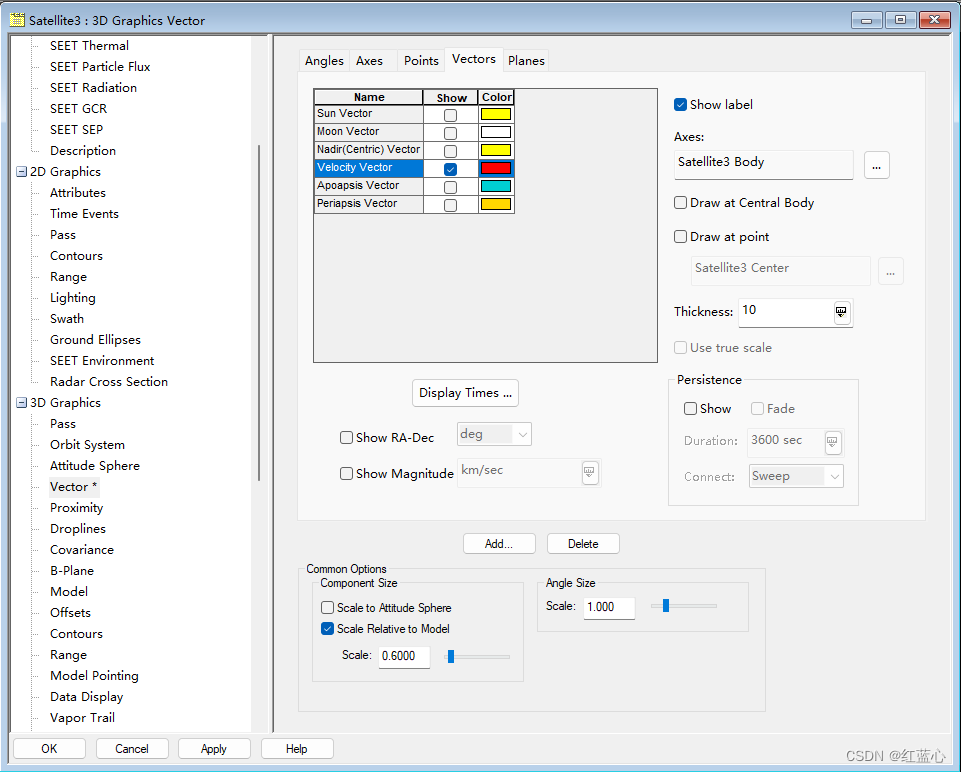
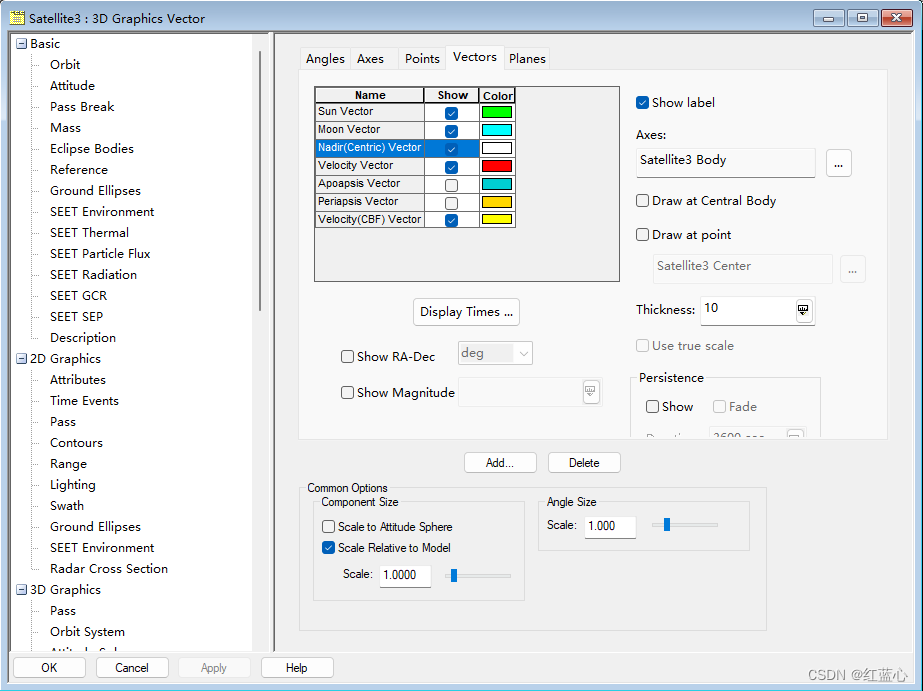
首先插入一颗Molniya轨道卫星,具体步骤可见STK 特定问题建模(一)判断对象可见性(存在约束),右键编辑其属性,打开在3D Graphics—vector—Vectors
左上角列表,展示出了默认可显示的与卫星相关的矢量,默认矢量含义如下:
| 名称 | 含义 |
|---|---|
| Sun Vector | 从卫星指向太阳的单位矢量 |
| Moon Vector | 从卫星指向月亮的单位矢量 |
| Nadir(Centric)Vector | 与位置矢量相反的、指向中心体中心的单位矢量 |
| Velocity Vector | 相对于中心体(地球)惯性坐标系下的卫星速度矢量 |
| Apoapsis Vector | 卫星近拱点矢量 |
| periapsis Vector | 卫星远拱点矢量 |
以速度矢量为例,勾选中Velocity Vector,左下角向量显示大小(Scale)改为0.6,保存设置。右键卫星,选择Zoom to,在3D窗口中查看卫星的速度方向
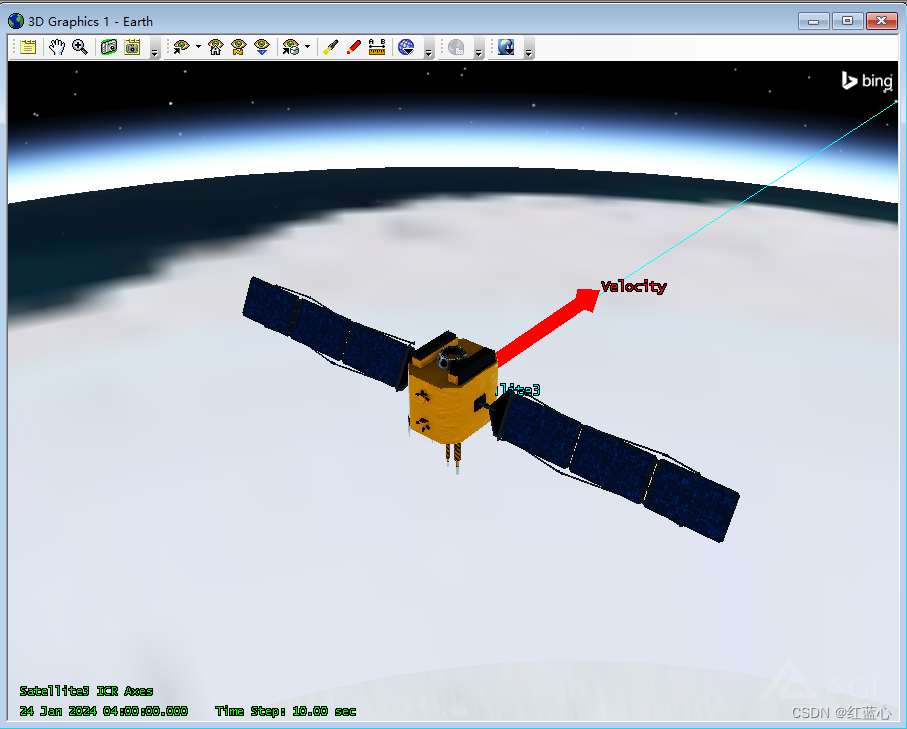
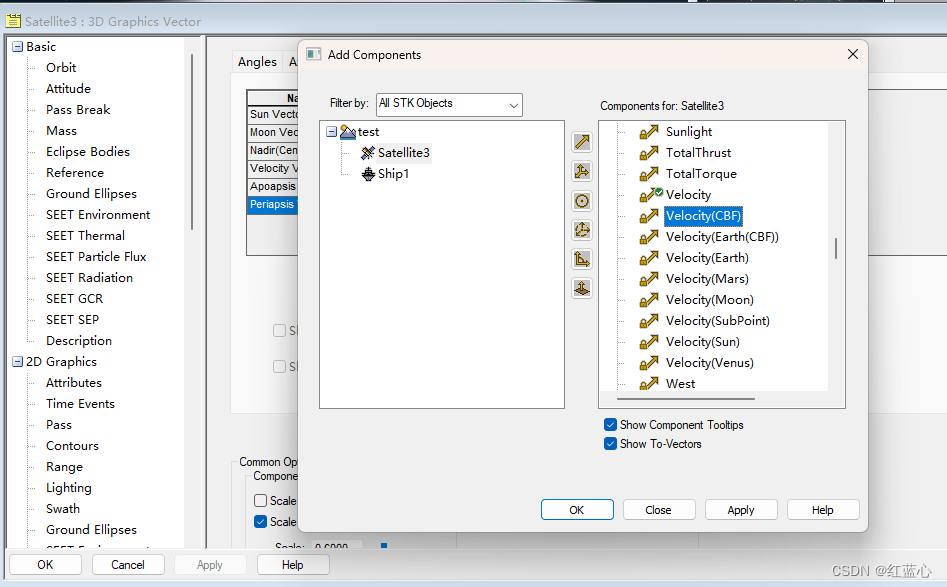
通过播放画面,可以查看卫星实时速度矢量的指向变化。除了默认的Vector外,3D Graphics—vector—Vectors中点击Add,可以添加各种与卫星相关的矢量并进行展示。
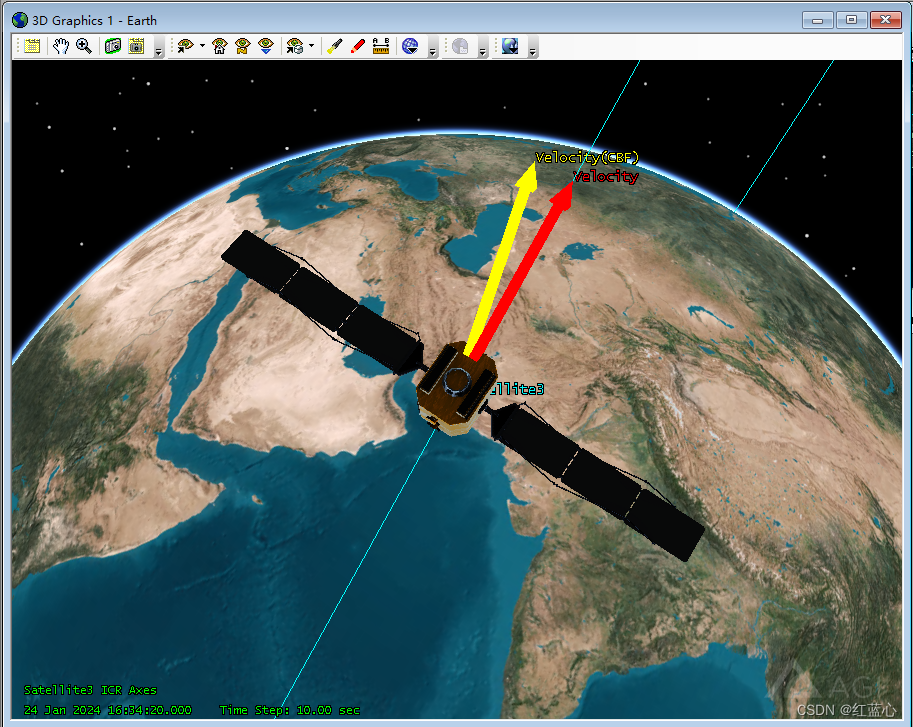
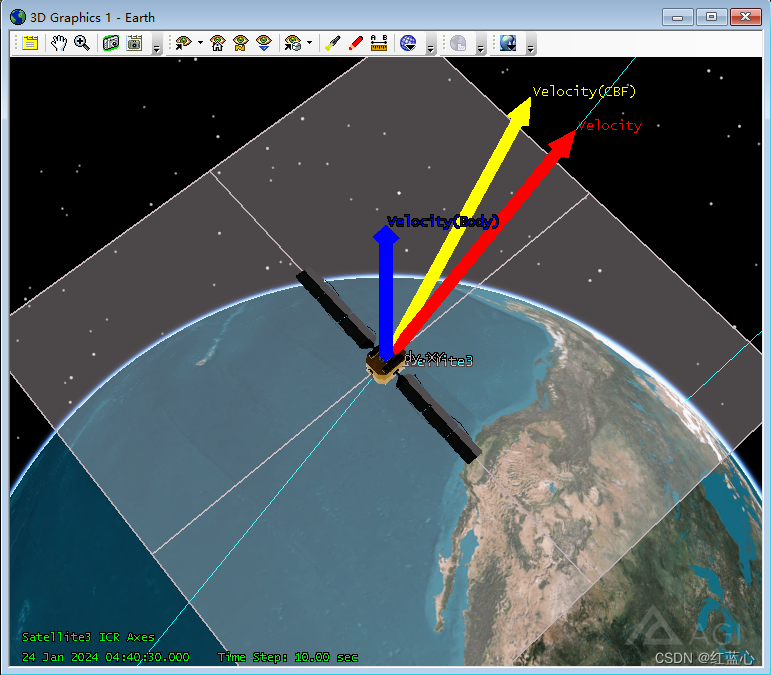
例如,除了卫星相对于地球惯性坐标系下的速度方向外,在Add中找到Vector(CBF),可以显示卫星相对于地球地固坐标系下的速度方向。
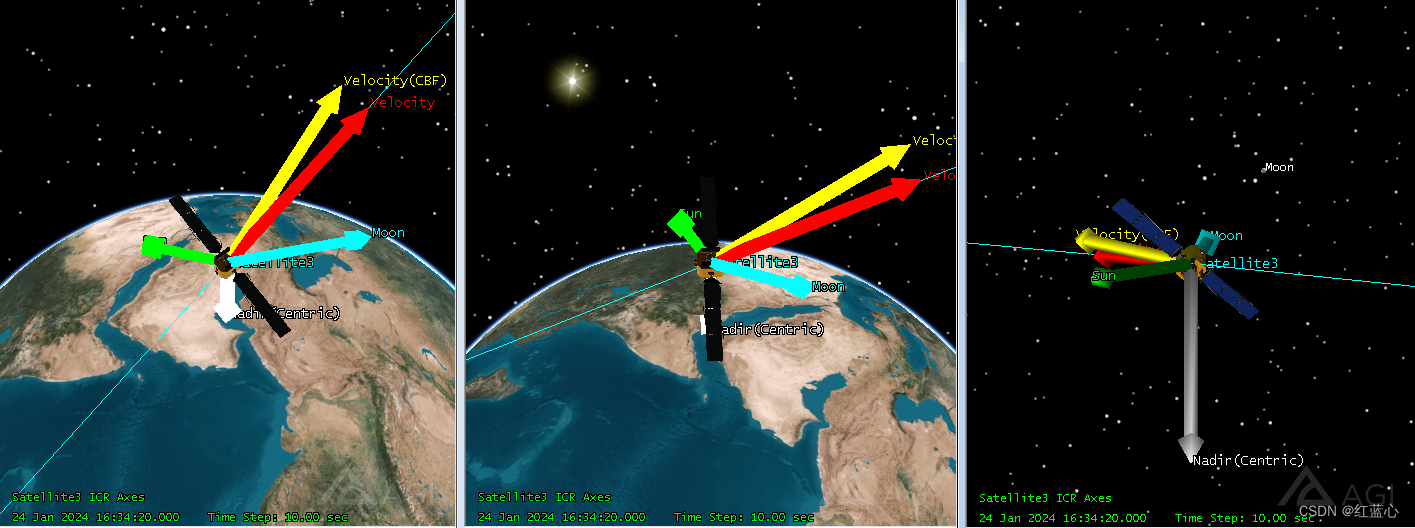
点击OK,查看3D视图,通过播放可以看到两个卫星速度矢量分离,反应了不同的参考坐标系间的区别。
进一步,勾选其他与卫星相关的矢量,结果如下:
白色矢量指向中心体(地球),绿色向量指向太阳,浅蓝色向量指向月亮。
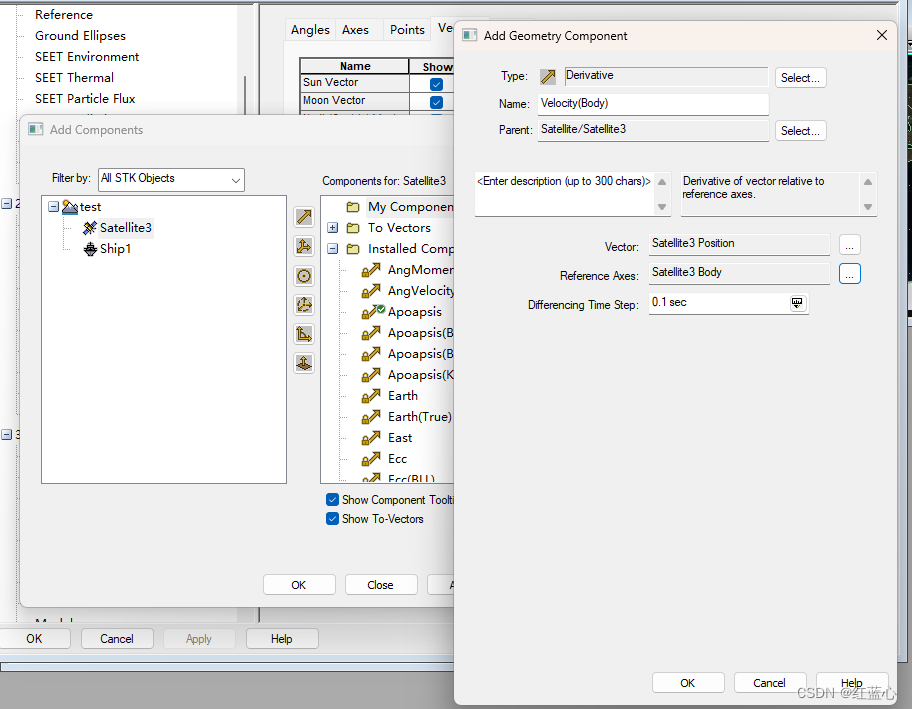
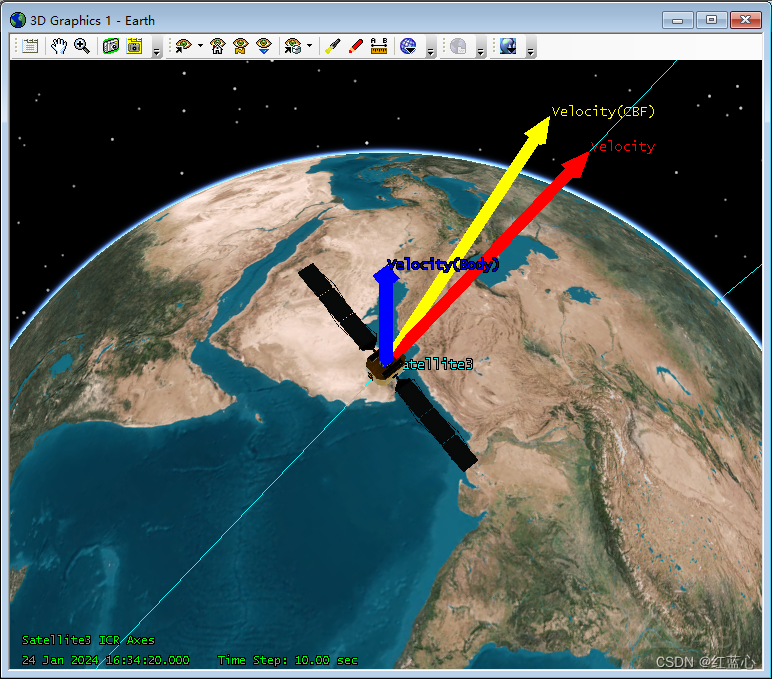
此外,可以自定义矢量类型。在Add中点击Create New Vector图标,Type选择为Derivative,Reference Axes选择为Body,创建一个以卫星载体坐标为参考轴的速度矢量。
二、卫星坐标平面
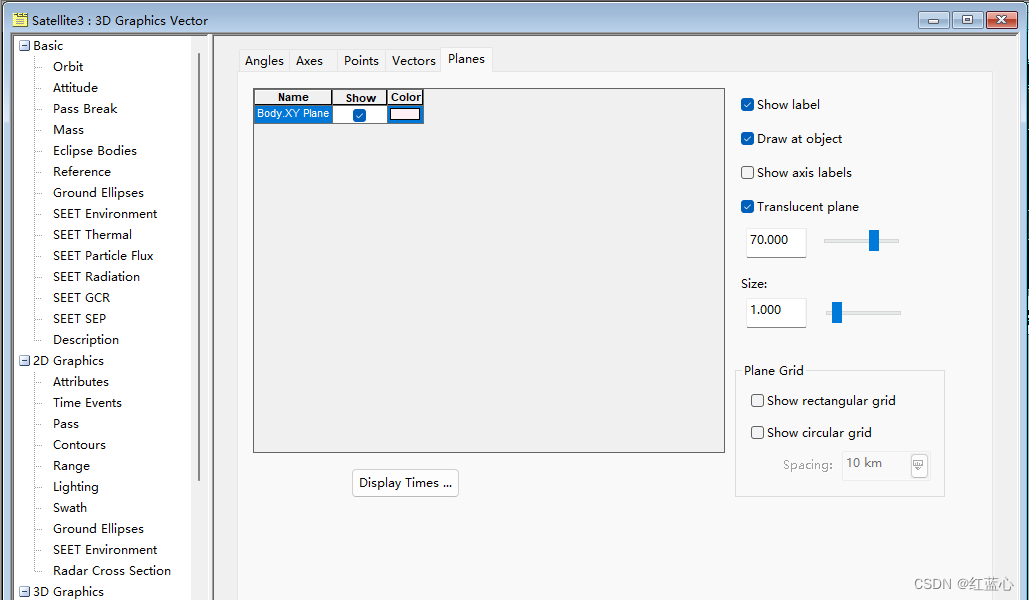
在3D Graphics—vector—Planes中,勾选Body XY planes,即可显示卫星载体坐标系下的XY平面
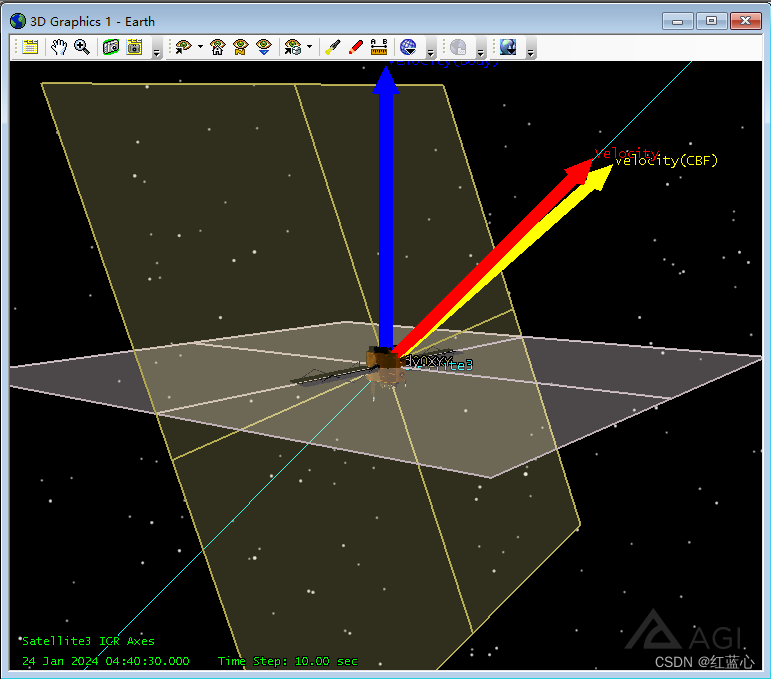
以卫星为原点,在Add中点击Create New Plane图标,创建一个J2000坐标系下的XY平面,参考坐标系选择为卫星J2000
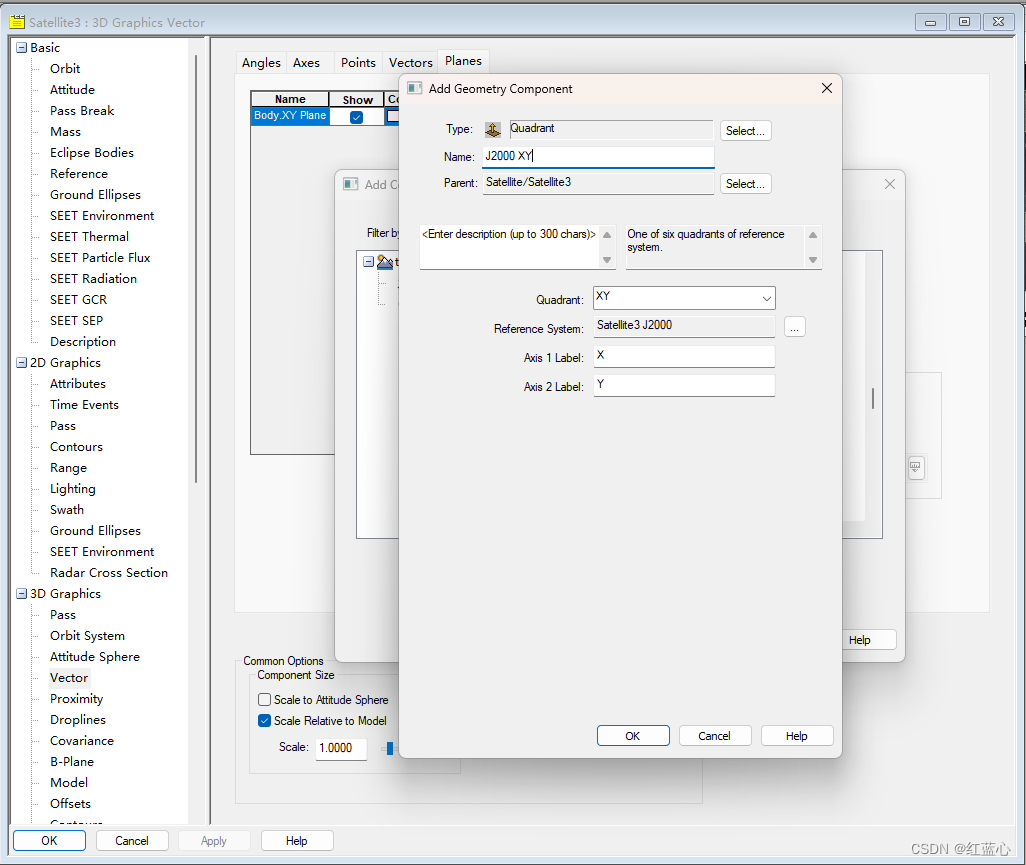
结果如下:
三、卫星姿态球面
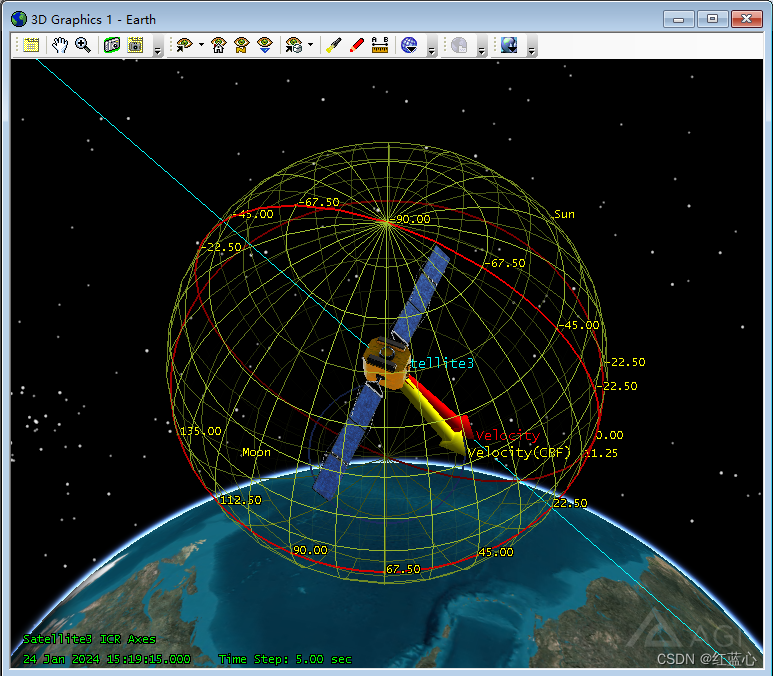
接下来显示卫星姿态,在3D Graphics—attitude sphere中勾选show。Sphere Color和Grid line控制姿态球面的网格线的外观。Zero Deg Color 以及Zero Deg line用于突出显示赤道和本初子午线。Scale控制显示球体大小,Frame显示球面参考坐标系。Projections下的列表中勾选中心天体,即在球面上显示中心天体边缘的投影。
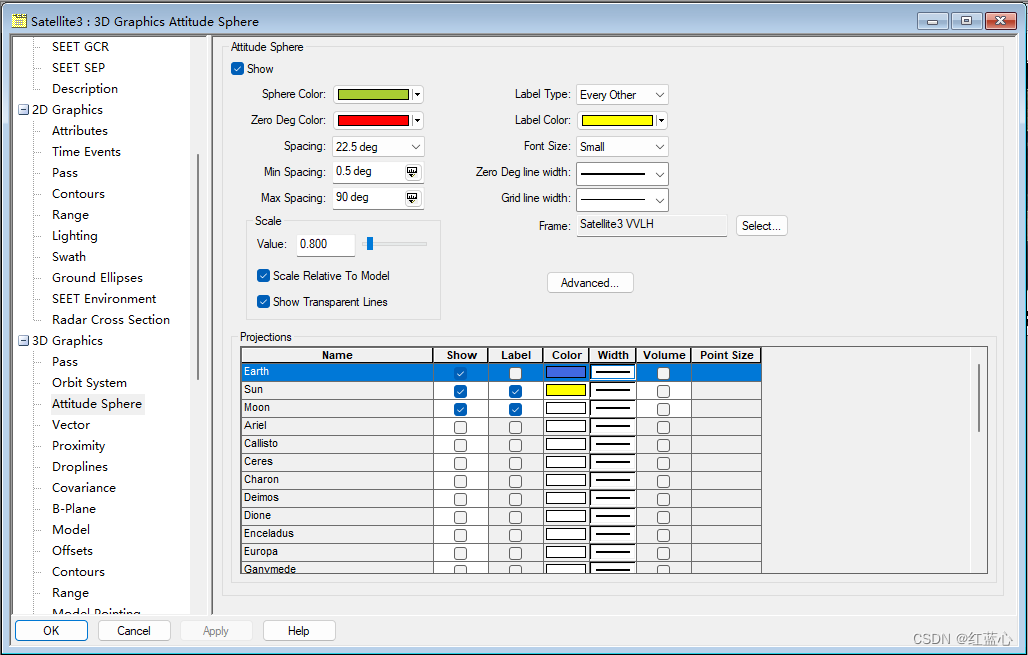
球面参考坐标系VVLH即:卫星速度水平轴,Z轴与卫星位置矢量相反,X 轴朝向惯性速度矢量,结果如下:
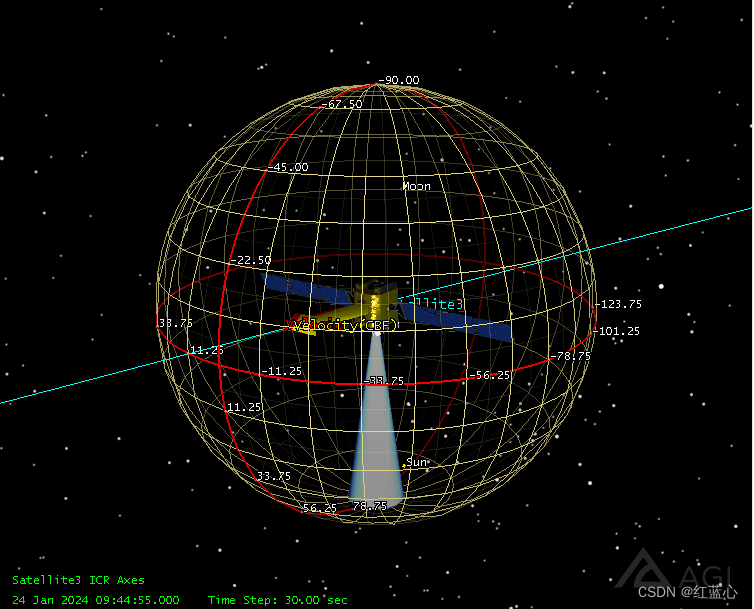
通过显示卫星姿态球面,可以更加方便地查看卫星的速度、位置以及姿态。比如要分析卫星相对于地球的速度,勾选Projections中earth的Volumn选项,可以验证当卫星位于远地点时,速度矢量(velocity与velocity CBF)与地球投影锥呈直角。
四、相对角度
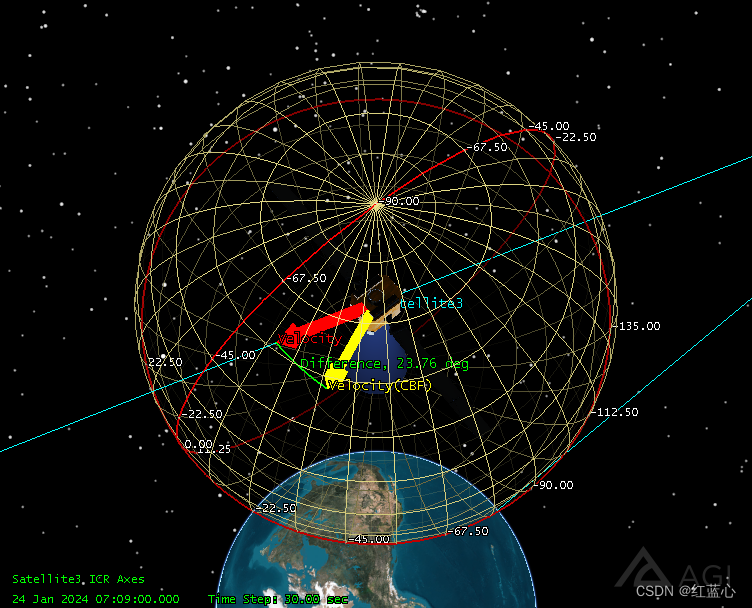
接下来使用Angle组件查看向量之间的角度信息。在Add中,点击Create new angle,类型选择为between vectors,两个向量选择之前使用的地固系以及惯性系下的速度,查看两个速度矢量的相对角度。
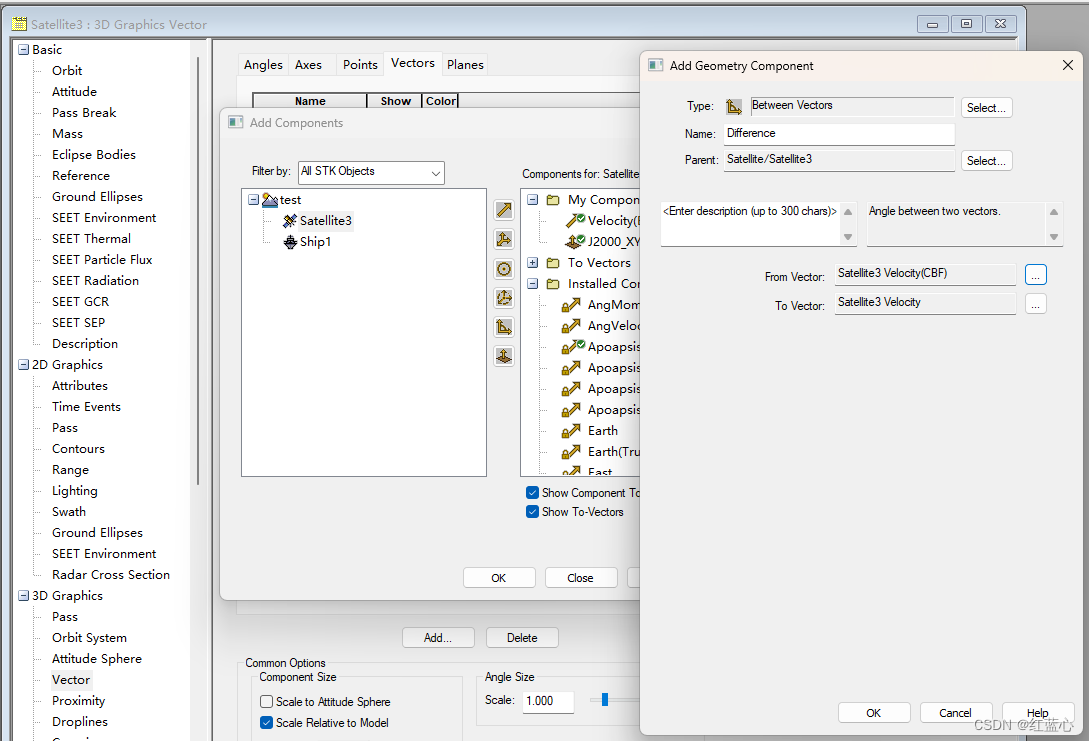
选中show angle value,查看具体数值(23.76°)
更多仿真内容,可以关注公众号“STK建模”查看


















 2220
2220

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









