






前言
当遇到多个轴的项目时,如果使用简单程序控制,不仅工作量大且容易出错。常用的方法是根据自己的控制和工艺要求去进行功能块二次封装。在不同项目的积累下,可以形成较为完善的功能块。本文将结合一个简单的伺服定位控制案例,介绍如何使用自定义功能块去控制伺服电机,后面功能块叫FB。
一、编写轴控制功能块
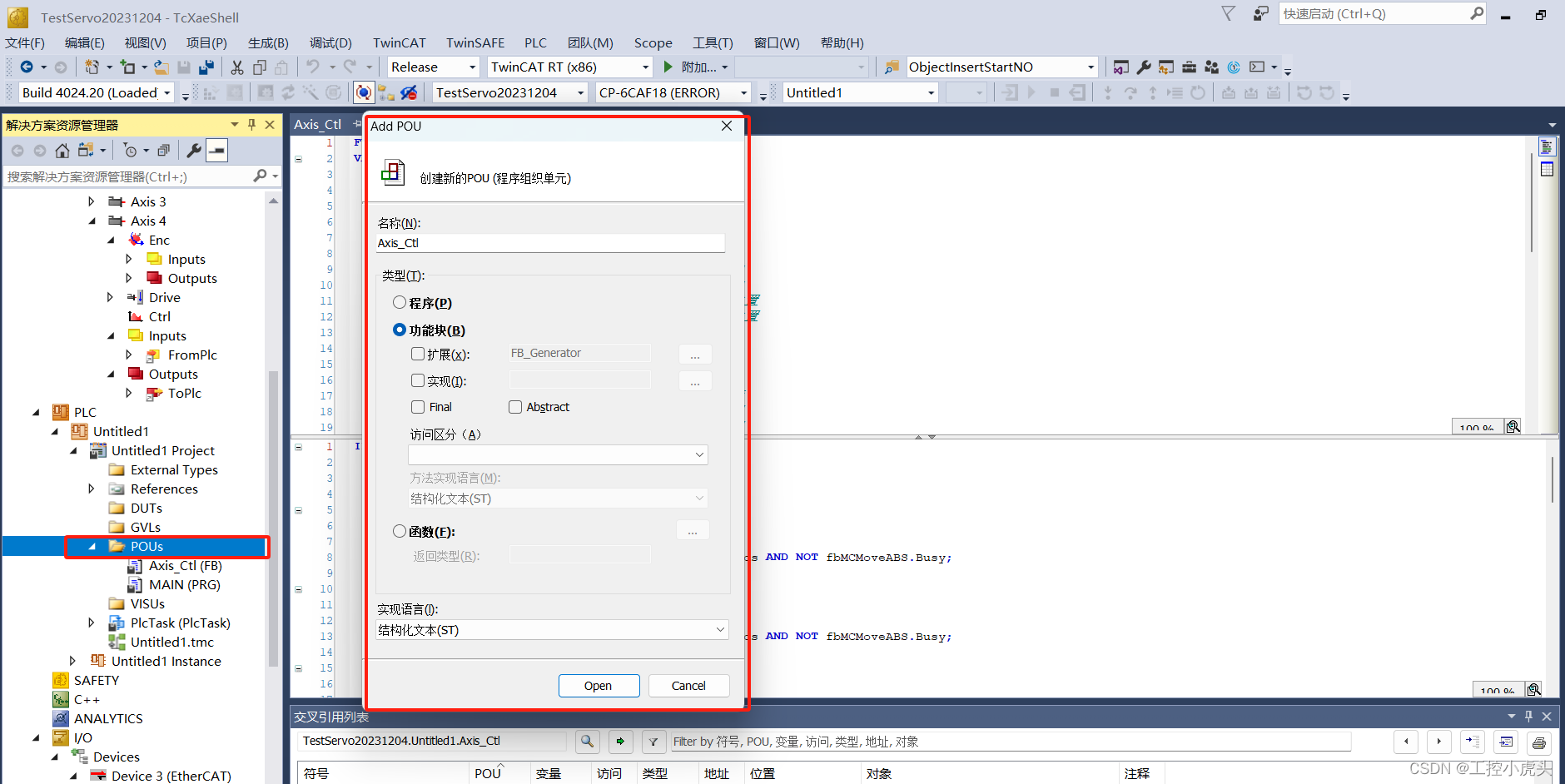
1,在POU新建功能块FB;
2,新建功能块的变量
(1)案例中把轴的变量建立在同一个FB中,参考建立如下变量:
FUNCTION_BLOCK PUBLIC Axis_Ctl
VAR_INPUT
iReset:BOOL; //轴复位
iStop:BOOL; //轴停止
iEMG:BOOL; //EMS急停
AxisPowerIN:BOOL; //轴上电
JogF:BOOL; //轴正向JOG启动
JogR:BOOL; //轴反向JOG启动
AutoR:BOOL; //轴反向定位启动
AutoF:BOOL; //轴正向定位启动
MoveABSPosR:LREAL; //轴反向的目标位置
MoveABSPosF:LREAL; //轴正向的目标位置
MoveVelF:LREAL; //轴正向的速度
MoveVelR:LREAL; //轴反向的速度
MoveACC:LREAL; //轴运动加速度
MoveDec:LREAL; //轴运行减速度
MoveJerk:LREAL; //轴运动加加速度
MaxPos:INT; //轴正向极限位置
MinPos:INT; //轴反向极限位置
JogVel:LREAL; //轴JOG速度
UpLimitSensor:BOOL; //轴正极限传感器
DownLimitSensor:BOOL; //轴负极限传感器
END_VAR
VAR_OUTPUT
AxisError:BOOL; //轴状态-出错
AxisMoving:BOOL; //轴状态-运动中
AxisPowerOK:BOOL; //轴状态-上电完成
oArriveFPos:BOOL; //轴状态-到达前进位置
oArriveRPos:BOOL; //轴状态-到达后退位置
oArriveMPos:BOOL; //轴状态-到达中间位置
AxisActPos:LREAL; //轴实际位置
AxisActVel:LREAL; //轴实际速度
END_VAR
VAR_IN_OUT
AxisRef:AXIS_REF; //轴引用对象
END_VAR
VAR
fbMCreadStatus:MC_READSTATUS; //轴状态读取功能块
fbMCPowerON:MC_Power; //轴上电功能块
fbMCJog:MC_JOG; //轴JOG功能块
fbMCMoveABS:MC_Moveabsolute; //轴绝对定位功能块
fbMCStop:MC_Stop; //轴停止功能块
fbMCReset:MC_Reset; //轴复位功能块
TOF1:tof;
END_VAR
(2)把系统封装的功能块进行二次封装,完成轴使能(MC_Power),轴JOG(MC_JOG),轴绝对运动(MC_Moveabsolute),轴停止(MC_Stop),轴复位(MC_Reset),案例中使用的是多圈绝对编码器,所以不需要回零,如果需要可以自行封装回零MC_Home,相对运动MC_MoveRelative等。本文常用的一些参数已进行了说明,如果自己有其他使用,建议参考TC3倍福的帮助文档。
参考代码如下:
IF NOT AxisError AND AxisPowerOK AND iEMG THEN
fbMCMoveABS.Acceleration:=MoveACC; //设置轴的加速度
fbMCMoveABS.Deceleration:=MoveDec; //设置轴的减速度
fbMCMoveABS.Jerk:=MoveJerk; //设置轴的加加速度
IF AutoF THEN
fbMCMoveABS.Position:=MoveABSPosF; //设置轴正向定位的绝对位置
fbMCMoveABS.Velocity:=MoveVelF ; //设置轴正向定位的速度
fbMCMoveABS.Execute:=AutoF AND NOT oArriveFPos AND NOT fbMCMoveABS.Busy; //绝对定位执行
END_IF
IF AutoR THEN
fbMCMoveABS.Position:=MoveABSPosR; //设置轴反向定位的绝对位置
fbMCMoveABS.Velocity:=MoveVelR ; //设置轴反向定位的速度
fbMCMoveABS.Execute:=AutoR AND NOT oArriveRPos AND NOT fbMCMoveABS.Busy; //绝对定位执行
END_IF
IF NOT AutoF AND NOT AutoR THEN
fbMCMoveABS.Execute:=FALSE;
END_IF
ELSE
fbMCMoveABS.Execute:=FALSE;
END_IF
fbMCreadStatus(Axis:=AxisRef);
TOF1(in:=AxisPowerIN AND NOT AxisError,pt:=T#2S);
//轴上电功能
fbMCPowerON(
Axis:= AxisRef,
Enable:= TOF1.Q,
Enable_Positive:= UpLimitSensor, //正极限SensorOn时,运行正转
Enable_Negative:= DownLimitSensor, //负极限SensorOn时,运行反转
Override:= ,
BufferMode:= ,
Options:= ,
Status=> AxisPowerOK,
Busy=> ,
Active=> ,
Error=> ,
ErrorID=> );
//轴JOG功能
IF JogF THEN
fbMCJog.Velocity:=JogVel;
ELSIF JogR THEN
fbMCJog.Velocity:=JogVel;
END_IF
fbMCJog(Axis:=Axisref,
Mode:= Tc2_MC2.MC_JOGMODE_CONTINOUS, //轴控制模式,根据需要选择INCH或者JOG
Velocity:=JogVel,
jogforward:=JogF AND NOT JogR AND NOT AxisError AND AxisPowerOK AND iEMG,
jogbackwards:=JOGR AND NOT JogF AND NOT AxisError AND AxisPowerOK AND iEMG);
//轴绝对运动功能
fbMCMoveABS(Axis:=Axisref);
//轴复位功能
fbMCReset(Axis:=AxisRef,Execute:=iReset AND AxisError);
//轴停止功能
fbMCStop(Axis:=AxisRef,Execute:=iStop OR AxisError OR (not iEMG) );
//轴状态数据监控
AxisError:=axisref.NcToPlc.ErrorCode<>0; //轴状态-出错
AxisMoving:=axisref.NcToPlc.AxisState<>0; //轴状态-运动中
AxisActPos:=axisref.NcToPlc.ActPos; //轴状态-实际位置
AxisActVel:=axisref.NcToPlc.ActVelo; //轴状态-实际速度
//轴正向运动到位
IF ABS(AxisActPos-MoveABSPosF)<0.5 THEN
oArriveFPos:=TRUE;
ELSE
oArriveFPos:=FALSE;
END_IF
//轴反向运动到位
IF ABS(AxisActPos-MoveABSPosR)<0.5 THEN
oArriveRPos:=TRUE;
ELSE
oArriveRPos:=FALSE;
END_IF
二、如何使用编写好的功能块
1,创建测试程序变量
VAR
testAxis:Axis_Ctl; //Axis_Ctl即是自定义封装的FB,这里建立它的实例轴
axis1:Tc2_MC2.AXIS_REF; //axis1即为NC轴对应的对象,让功能块知道控制的是哪根轴,轴绑定方法见第二篇
//建立测试变量
step:UINT; //工艺步骤
init:BOOL; //初始化启动
inialOK:BOOL; //初始化OK
Enable:BOOL; //启动允许
StartRTrig:Tc2_Standard.R_TRIG;//上升沿
moveDone:BOOL; //工艺完成
END_VAR
2,规划控制程序的逻辑架构,这里的案例我们实现将轴正向定位3圈,反向定位1圈后结束。
那么程序应该包括:
(1)初始化:包括回零(使用增量编码器时),轴移动到准备位置,机构复位等;
(2)定义工艺步骤,细化每一步工艺应轴应该到的位置,移动速度等;
(3)实现轴功能块的调用;
参考代码如下:
//初始化
IF init THEN
step:=0;
inialOK:=FALSE;
testAxis.MoveVelF:=testAxis.MoveVelR:=500; //设置定位速度
testAxis.MoveABSPosR:=testAxis.MinPos:=0; //设置反向定位位置为0
testAxis.AutoR:=TRUE;testAxis.AutoF:=FALSE; //反向定位给启动
IF testAxis.oArriveRPos THEN //判断是否到达位置
testAxis.AutoR:=FALSE;testAxis.AutoF:=FALSE;
inialOK:=TRUE;
init:=FALSE;
END_IF
END_IF
//轴定位启动
StartRTrig(clk:=Enable AND inialOK);
IF StartRTrig.q THEN
Step:=10;
END_IF
//轴工艺步骤
CASE step OF
0:
IF NOT init THEN
testAxis.AutoR:=testAxis.AutoF:=FALSE;
END_IF
10:
testAxis.MoveVelF:=500; //设置定位速度
testAxis.MoveABSPosF:=1080; //设置正向定位位置是300
testAxis.AutoF:=TRUE;testAxis.AutoR:=FALSE; //反向定位给启动
IF testAxis.oArriveFPos THEN //判断是否到达位置
testAxis.AutoR:=FALSE;testAxis.AutoF:=FALSE;
step:=20;
END_IF
20:
testAxis.MoveVelR:=250; //设置定位速度
testAxis.MoveABSPosR:=360; //设置正向定位位置是300
testAxis.AutoF:=FALSE;testAxis.AutoR:=TRUE; //反向定位给启动
IF testAxis.oArriveRPos THEN //判断是否到达位置
testAxis.AutoR:=FALSE;testAxis.AutoF:=FALSE;
step:=100;
END_IF
100:
moveDone:=TRUE;
END_CASE
//轴功能块调用
testAxis(
iReset:= ,
iStop:= ,
iEMG:= ,
AxisPowerIN:= ,
JogF:= ,
JogR:= ,
AutoR:= ,
AutoF:= ,
MoveABSPosR:= ,
MoveABSPosF:= ,
MoveVelF:= ,
MoveVelR:= ,
MoveACC:= ,
MoveDec:= ,
MoveJerk:= ,
MaxPos:= ,
MinPos:= ,
JogVel:= ,
UpLimitSensor:= ,
DownLimitSensor:= ,
AxisError=> ,
AxisMoving=> ,
AxisPowerOK=> ,
oArriveFPos=> ,
oArriveRPos=> ,
oArriveMPos=> ,
AxisActPos=> ,
AxisActVel=> ,
AxisRef:= axis1);
说明:1,在初始化阶段,我们可以把轴放到一个待机位置,如果有其他执行机构需要控制,也一并放到初始化中,作为运动的起始位置;2,在轴工艺阶段,把相关的控制动作根据工艺目标进行分步骤编写,上述案例程序实现将轴定位到1080°(即3圈的位置),再反向定位到360°(1圈)的位置,然后完成定位任务;3,在轴调用的功能块中,可以看到有些输入参数是在逻辑程序中进行使用,并未在功能块直接赋值,使用方法是功能块名称.输入参数。
总结
本文介绍了倍福PLC如何自定义功能块进行轴定位控制,同时说明了如何使用FB,进行轴控制程序的编写的基本方法。后续大家想了解倍福PLC哪些方面的功能,可以留言。


















 1066
1066

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









