







强化学习的各种方法都是围绕贝尔曼公式和贝尔曼最优公式进行的,强化学习牵涉的概念较多,不易理解,公式中包含的符号较多,容易绕晕,本文从一些基本的概念出发,阐述状态、策略、动作、奖励的原始概念,然后导出贝尔曼公式,并给出相关的例子,便于理解概念。
1 计算return的方法
一个智能体,在环境中,会采用不同的动作,得到不同的奖励
从起点出发,转移到其它状态,并根据一定的折扣因子(我更喜欢物理学中的衰减因子这个称呼)进行奖励衰减,折扣因子的引入是为了权衡当前奖励和未来奖励的权重,当折扣因子为0时就相当于只重视当前短期的利益,而折扣因子为1时,就看中长远利益。
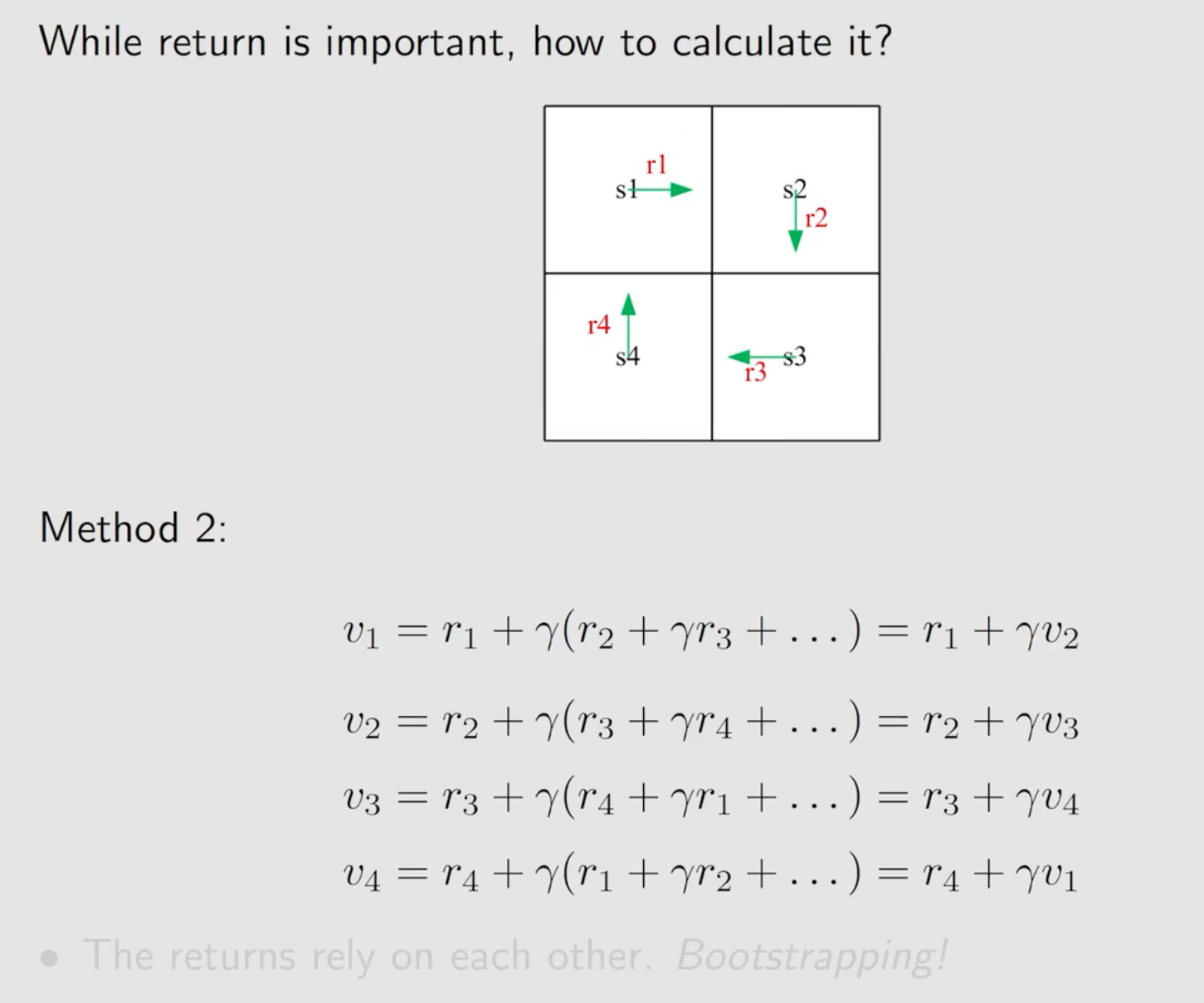
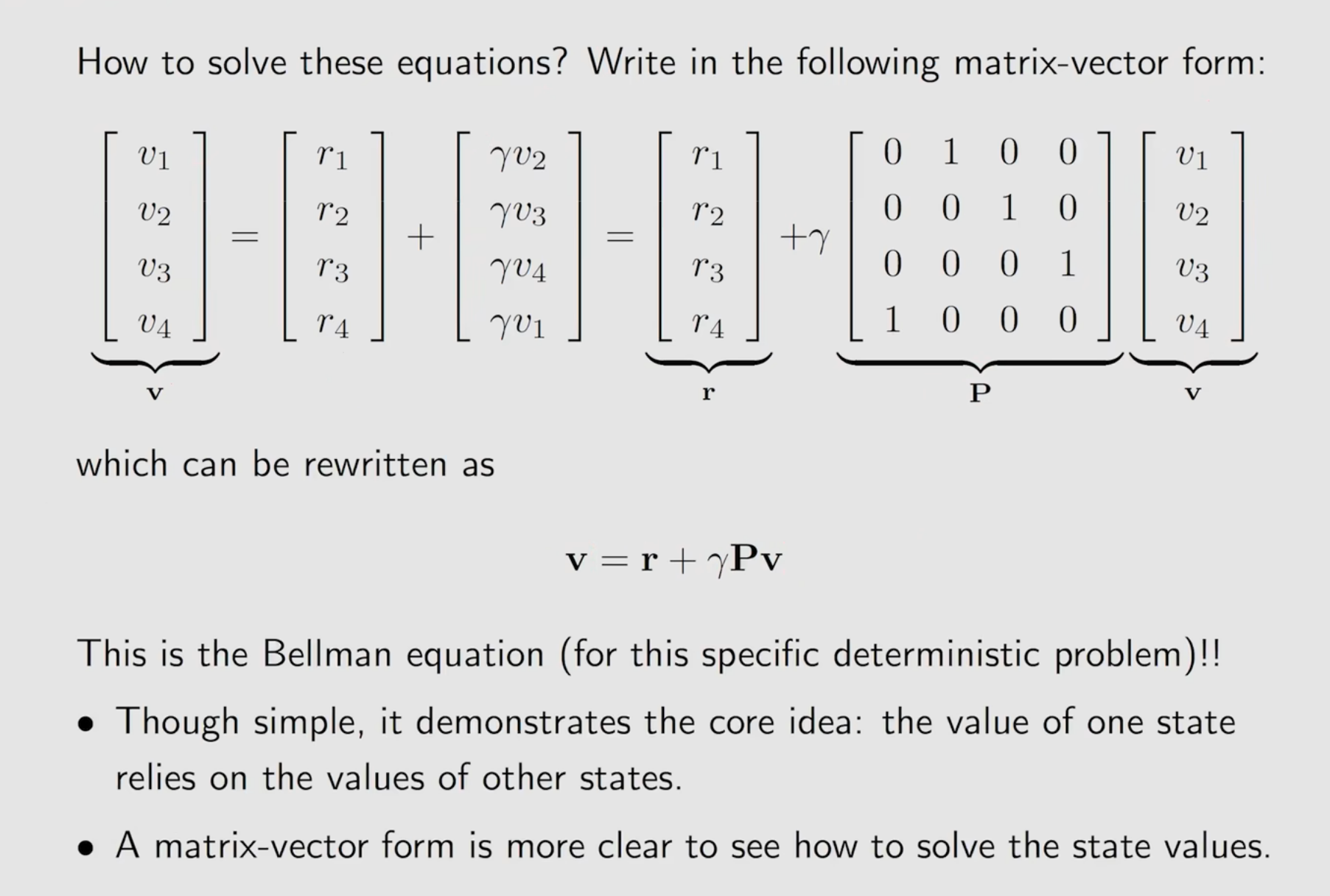
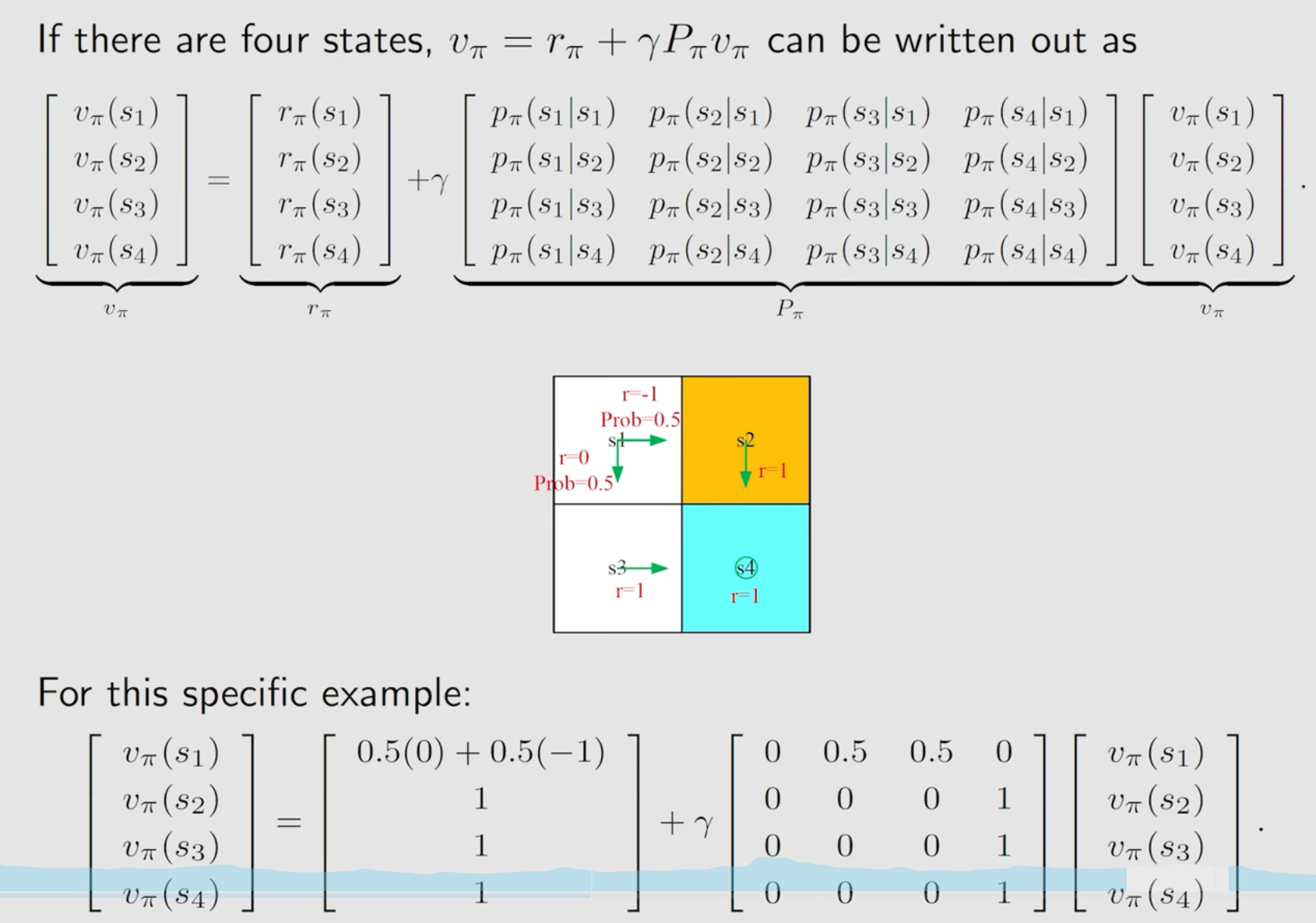
上面不同的状态v的未知数,转换为矩阵形式就可以求解方程,而这个表达式就是特殊的确定性策略下的贝尔曼公式
2 state_value
有了上面的概念,下面给出一般意义下的状态值的定义。
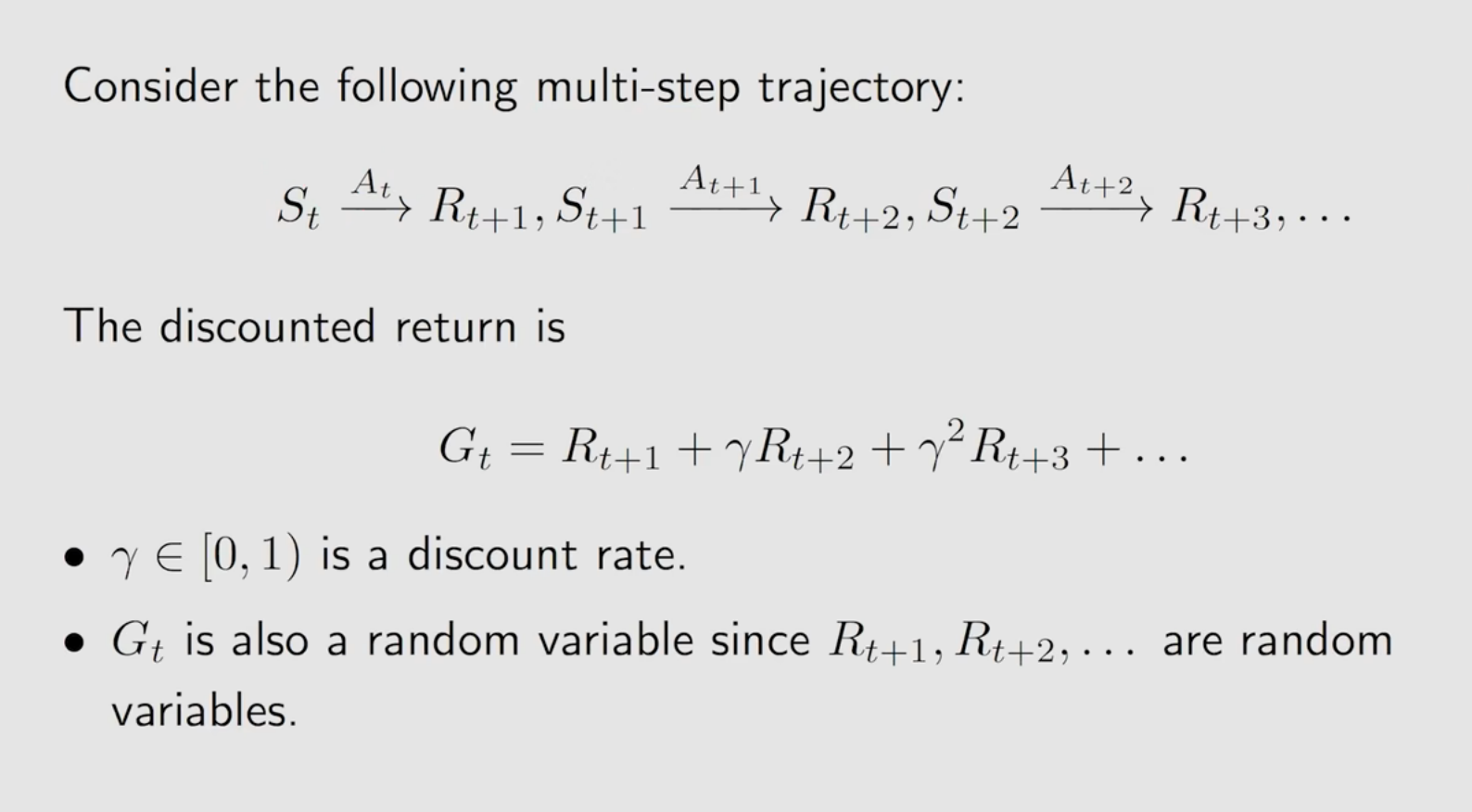
求不同策略π下得到的Gt均值
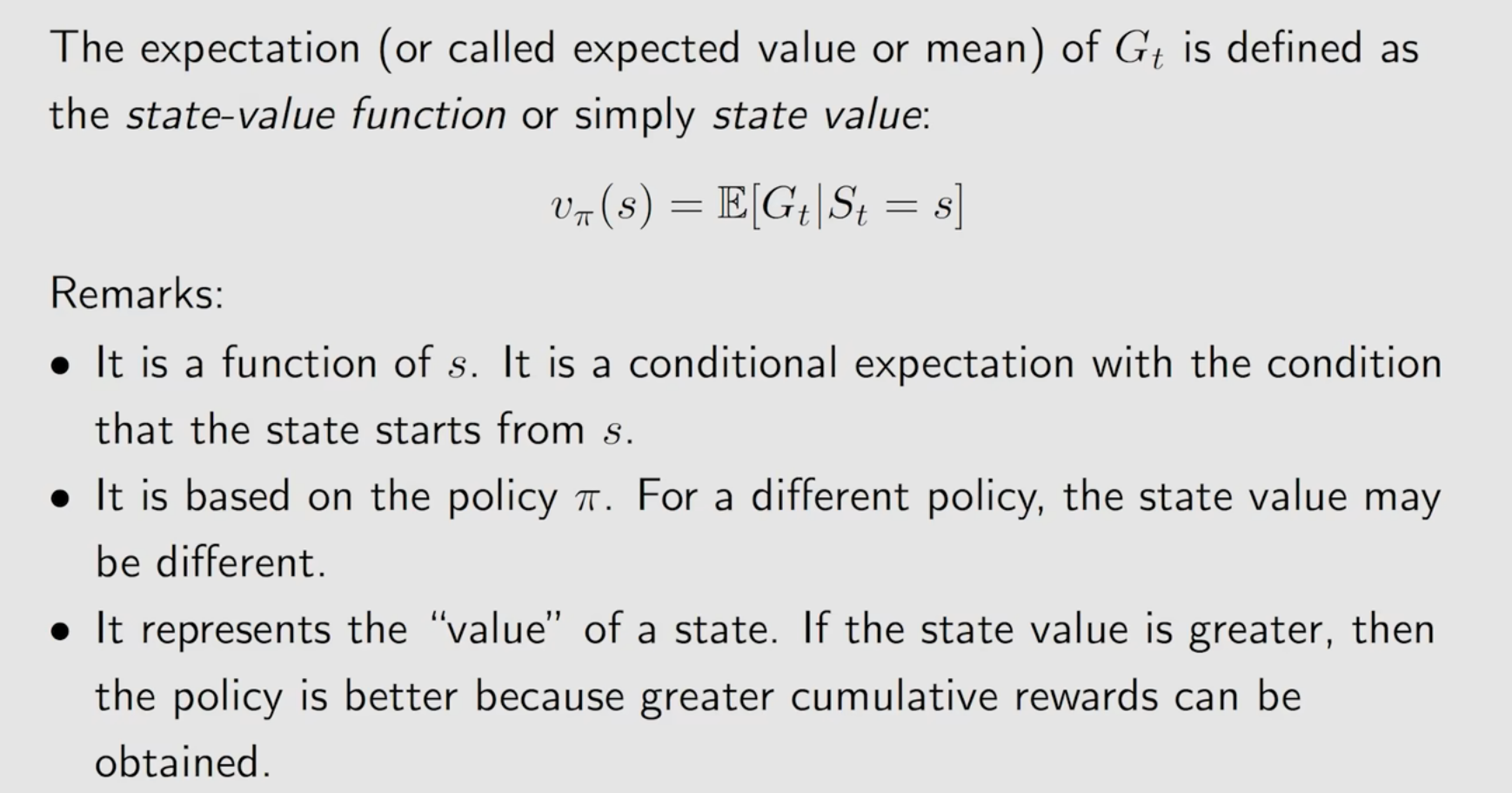
举例说明,以下通过三种策略,s1到终点s4,求取s1的state_value为:
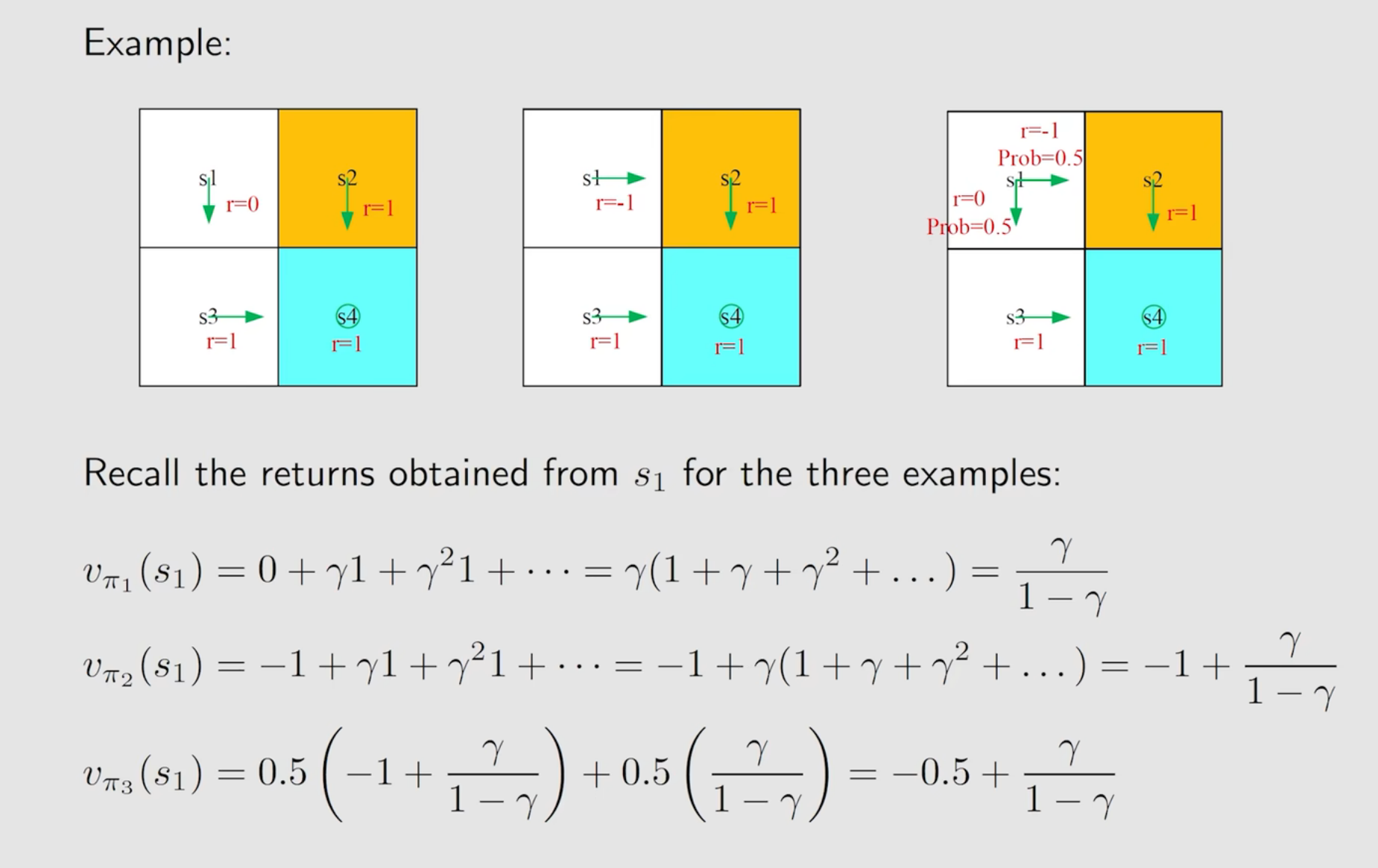
在上面求解过程中,策略给定后就是确定性的问题了,到达终点后一直在终点保持不动,就会形成无限多的变量。
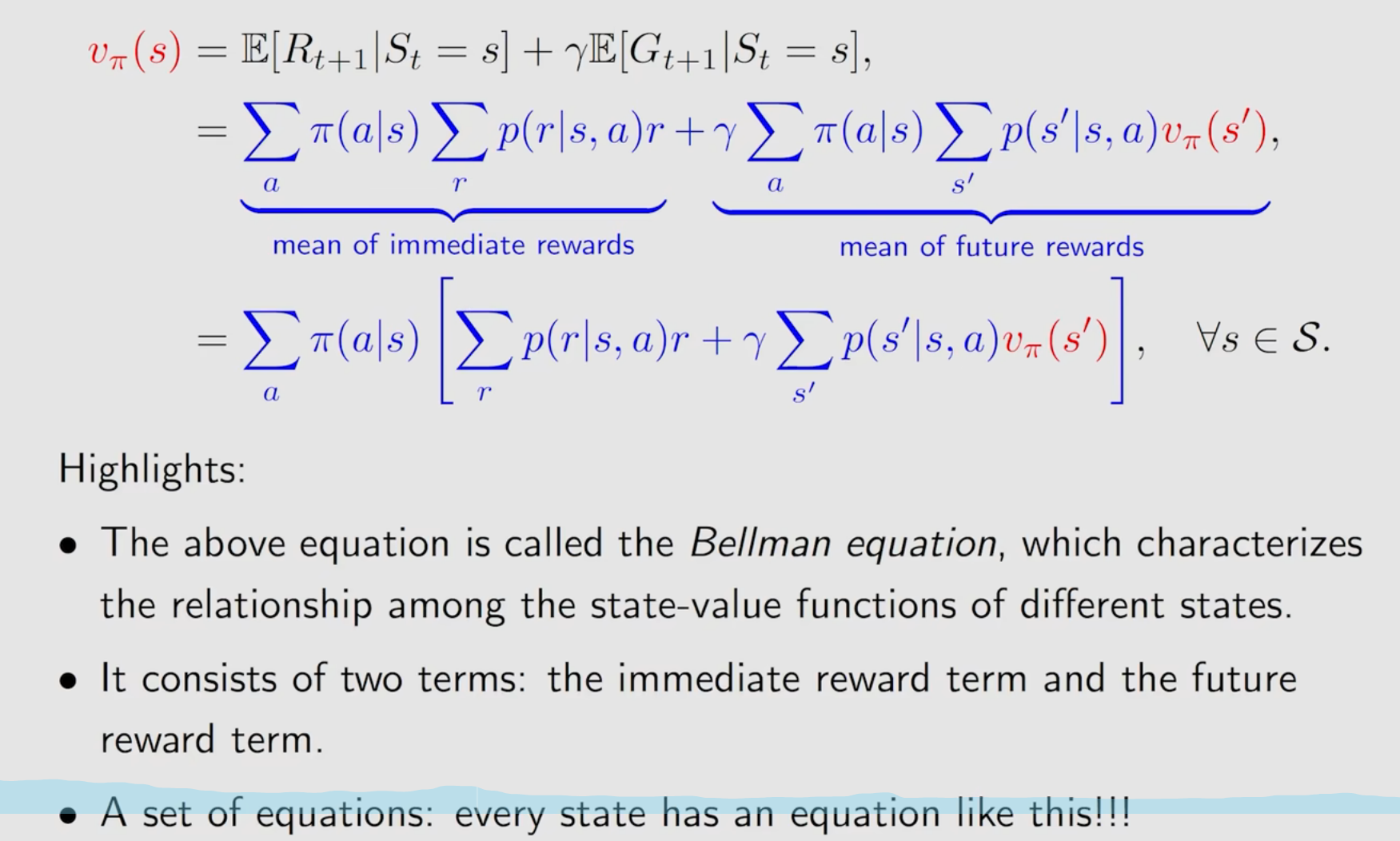
贝尔曼公式
求取状态在所有策略下奖励的均值。
包含两部分,立即奖励和未来奖励,是不同状态和策略之间的相互关系,状态值越大,说明该状态越有意义。
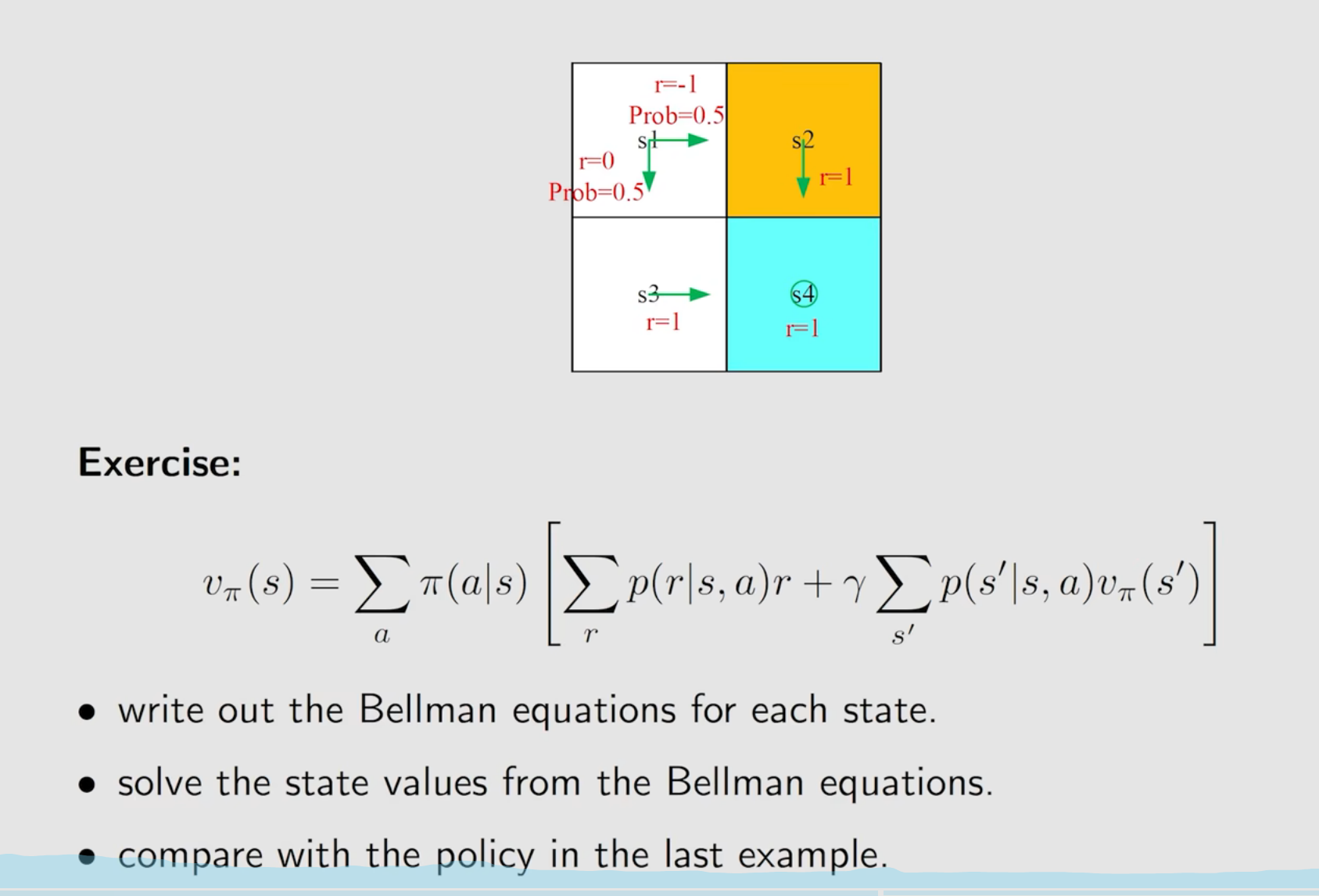
举例说明:
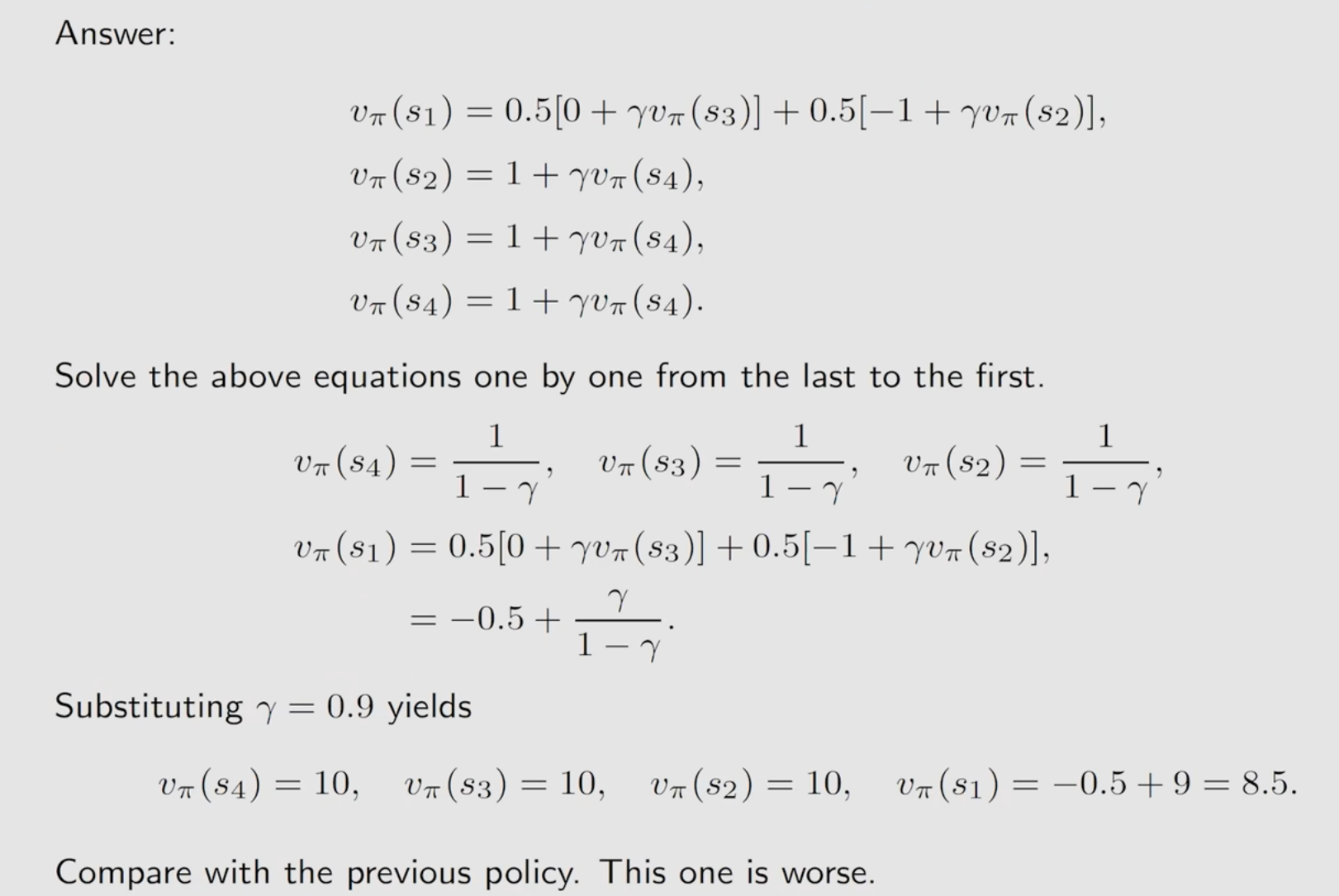
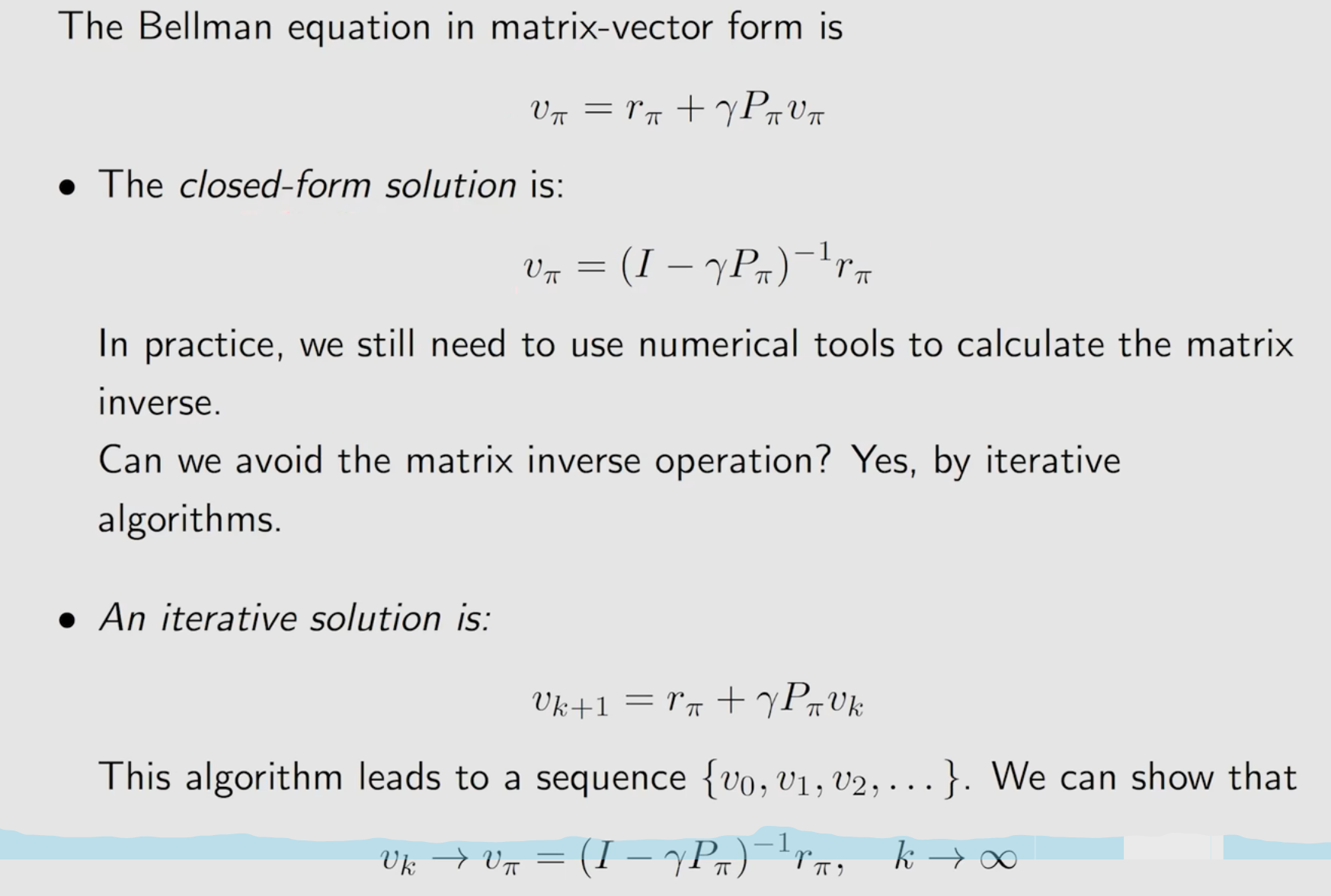
写成矩阵向量形式:
求解贝尔曼方程有两种方法:
一种是解析法(需要知道状态转移概率P,但现实中很难知道);
一种是迭代法(可以证明在折扣因子在0到1之间时是收敛的);
策略评估policy evaluation:
给定策略π,计算所有的状态值。
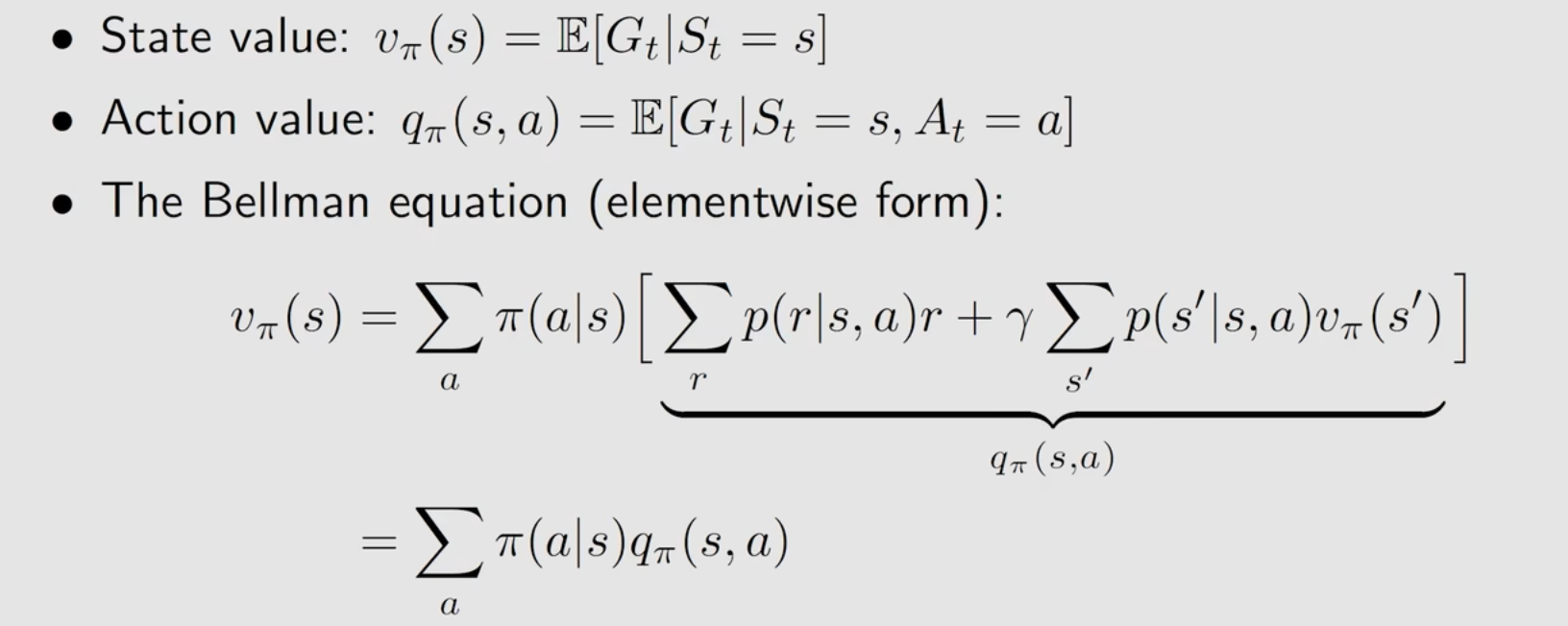
状态值和动作值:

状态值:从一个状态返回的回报的均值
动作值:从一个状态和一个动作返回的回报的均值
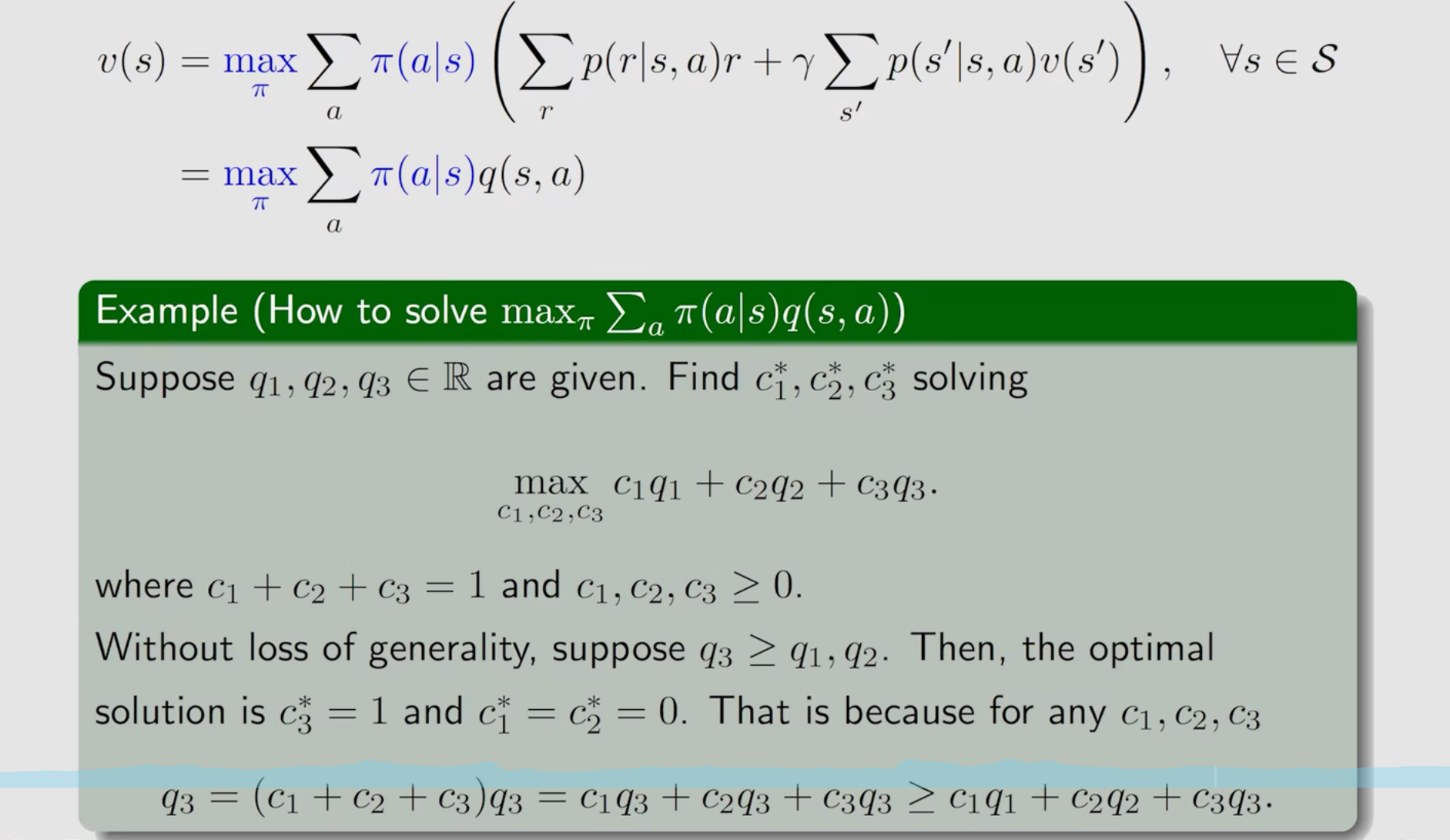
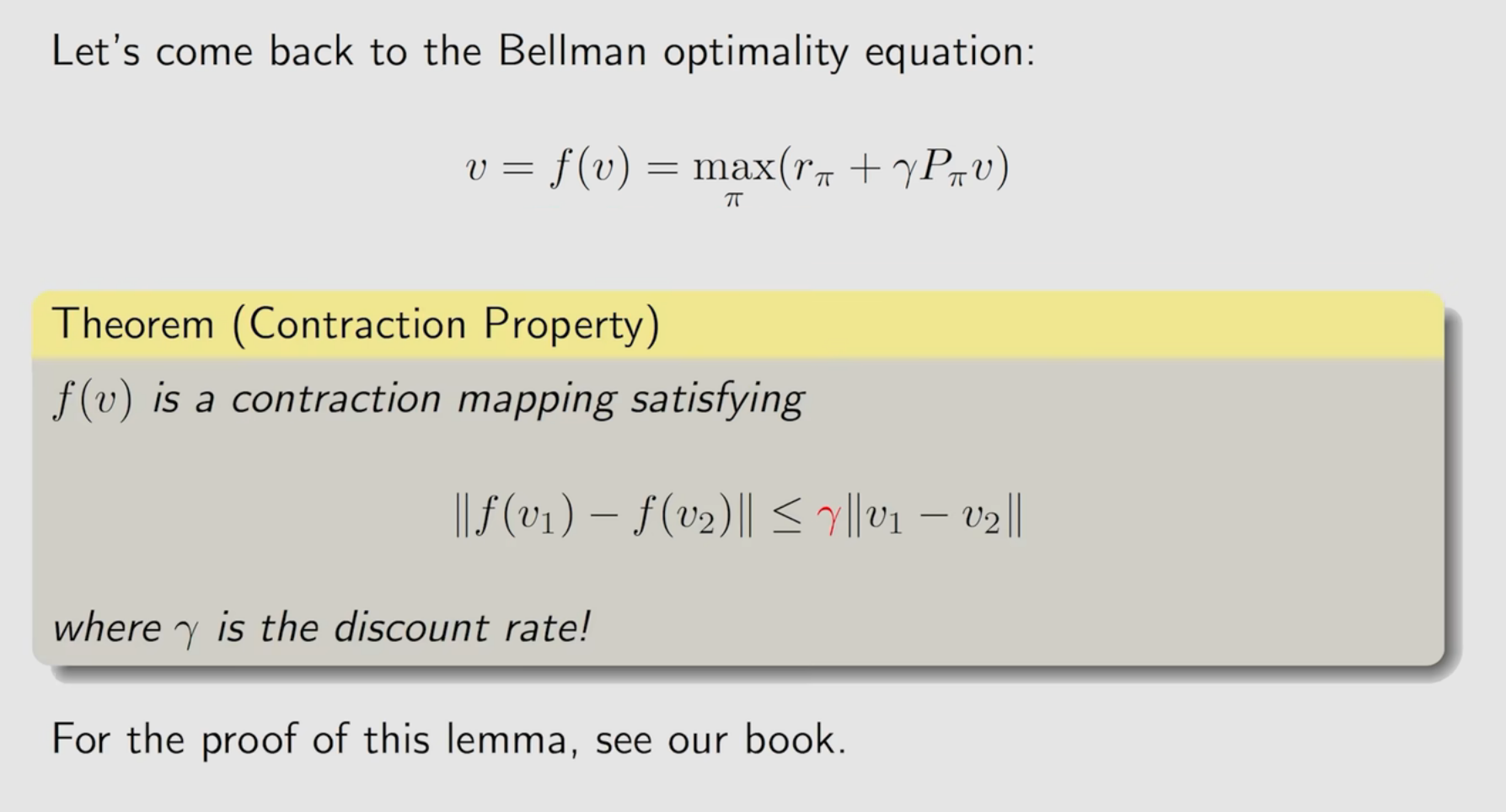
贝尔曼最优公式
需要求解最优策略π,使得v最大。
已知状态转移概率p,r和γ,求π和v。
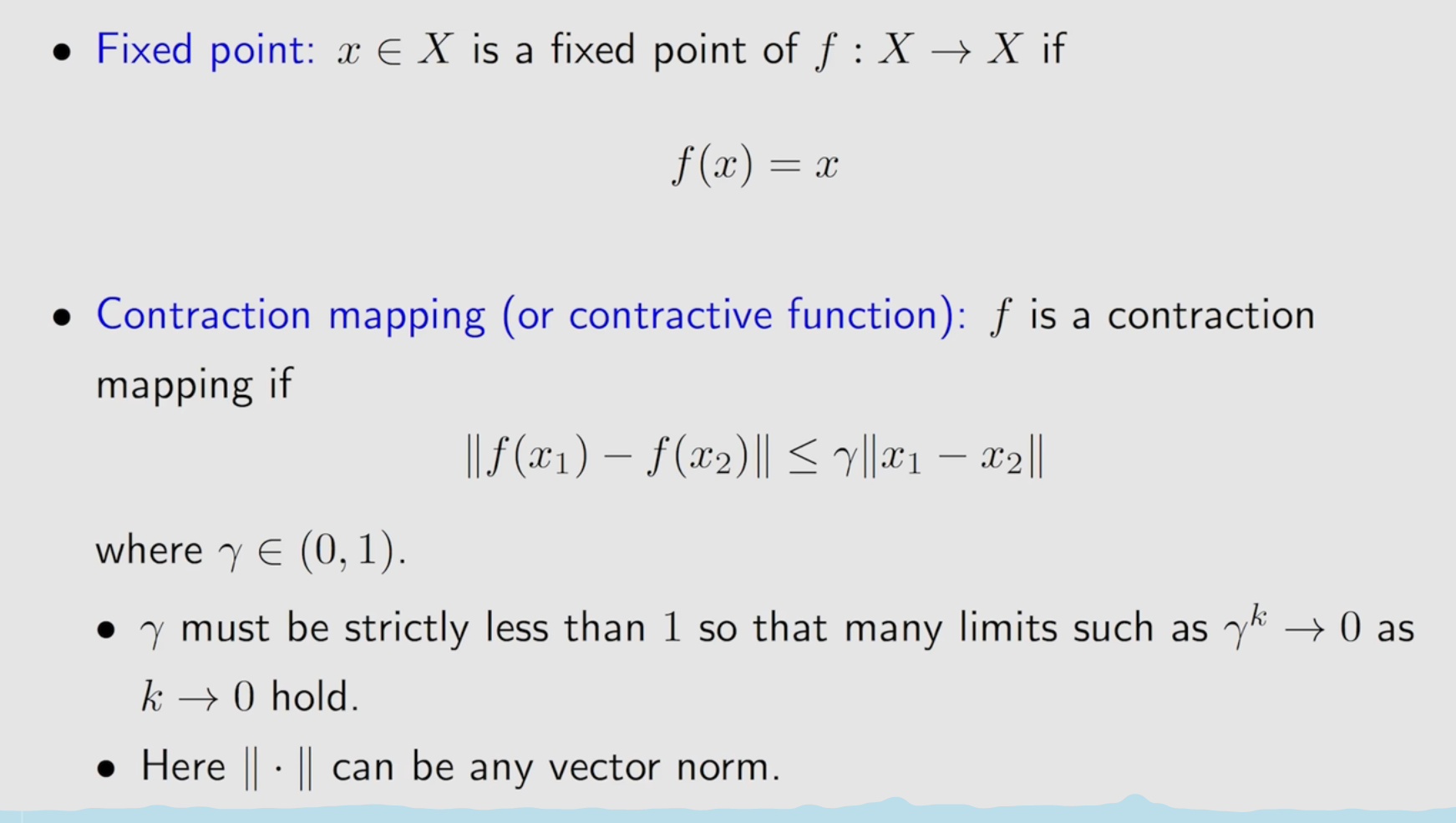
不动点理论:
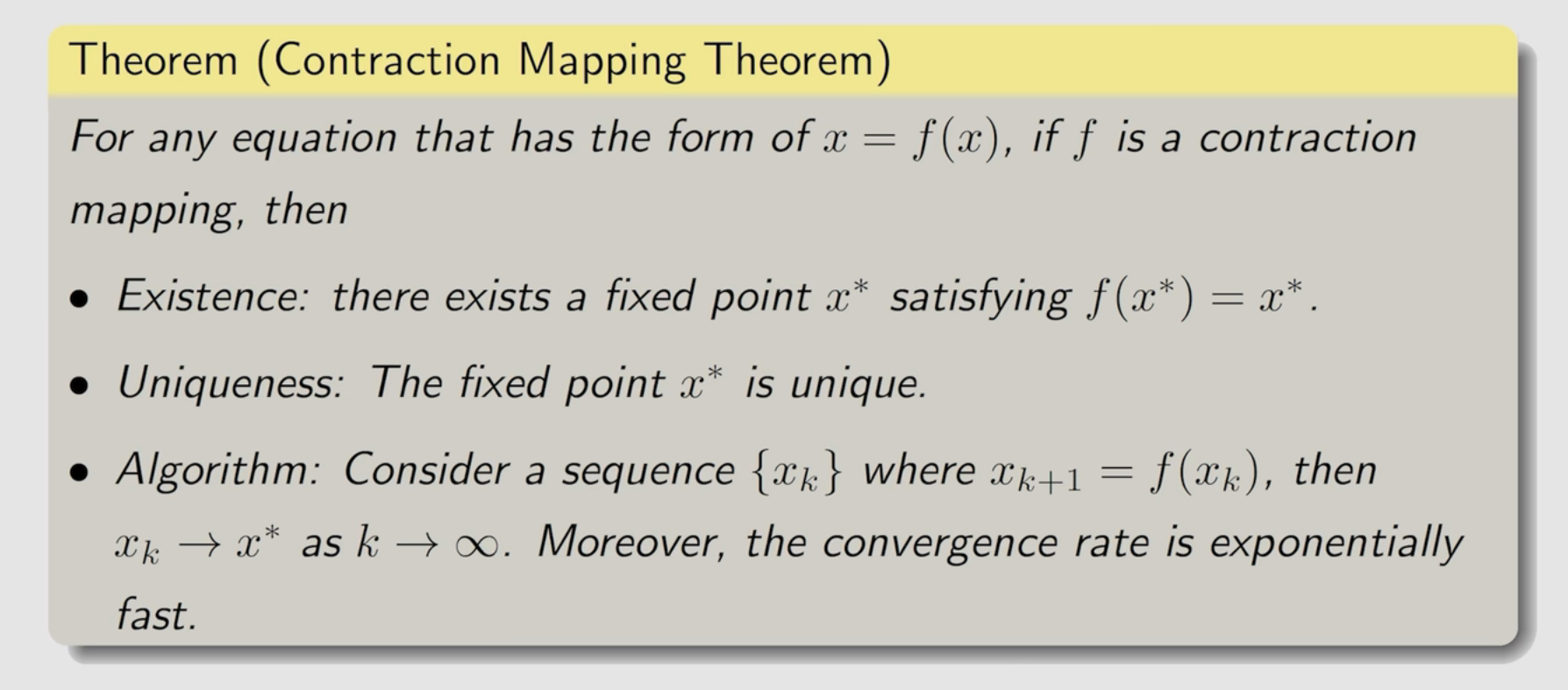
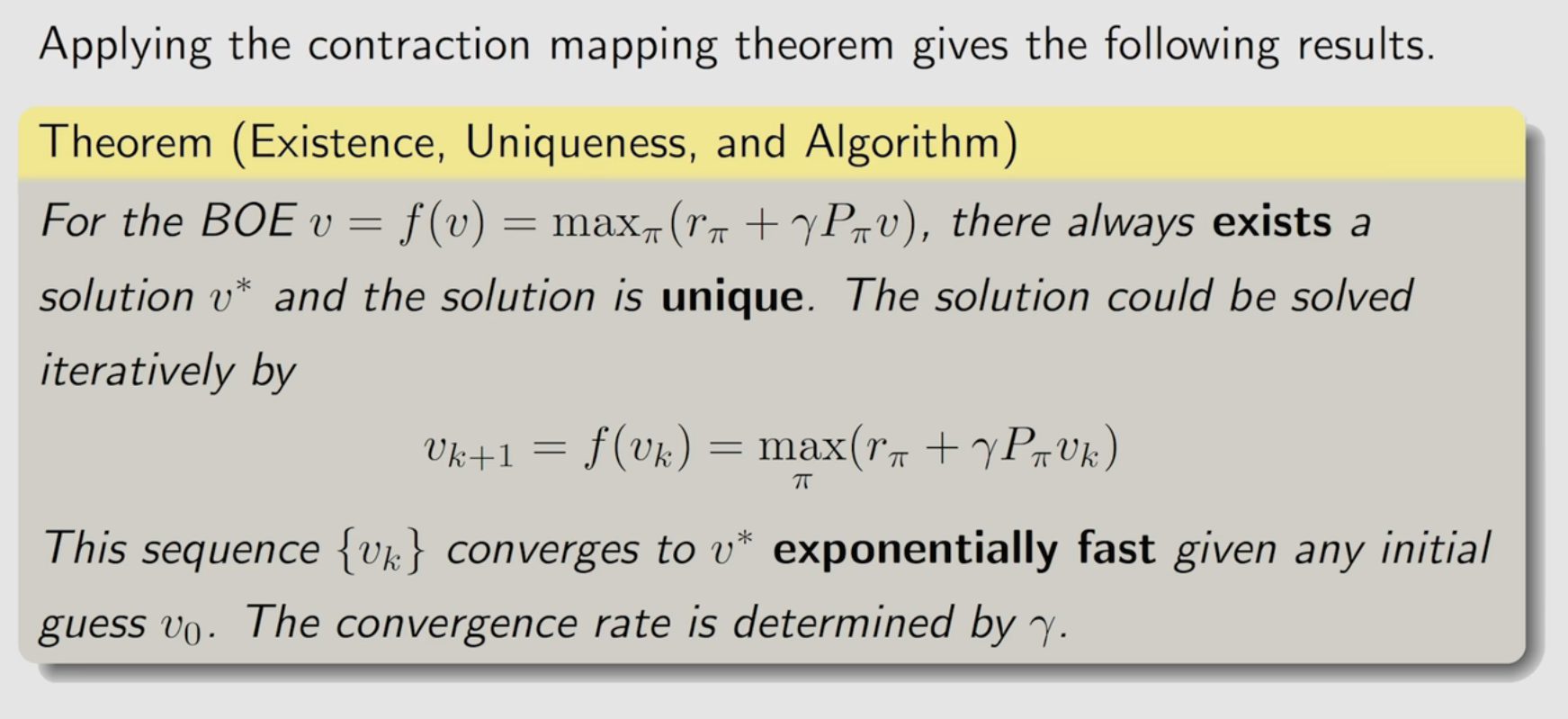
贝尔曼最优公式的解的性质
- 存在性
- 唯一性
- 指数收敛
- 可迭代性


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









