







1、前言
蓝桥杯的国赛会遇到多路AD采集的情况,这时候之前的单路采集的方式就不可用了,下面介绍两种多路采集的方式。

以第13届国赛为例

2、方法一(配置通道)
2.1 使用CubeMx配置
设置IN13与IN17为Single-ended
在Parameter Settings中
设置Clock Prescaler为Asynchronous clock mode divided by 2
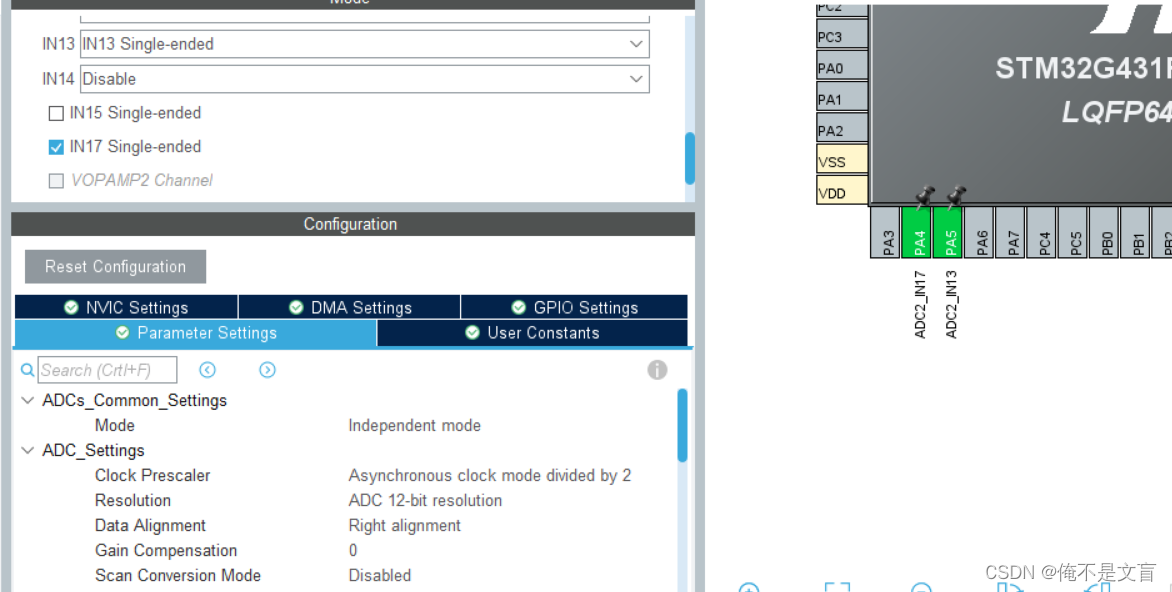
设置Rank-Sampling Time为640.6 Cycles

2.2 bsp_adc.h代码编写
#include "main.h"
extern ADC_HandleTypeDef hadc2;
void ADC2_Init(void);
uint32_t Get_Adc(void);
uint32_t Get_PA4(void);
uint32_t Get_PA5(void);2.3 bsp_adc.c代码编写
每次进行adc采集之前,重新配置一遍参数
ADC_ChannelConfTypeDef sConfig = {0};
sConfig.Channel = ADC_CHANNEL_17;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);记住不要重复进行RCC的配置,否侧会卡死
//这两个,不用加了
__HAL_RCC_ADC12_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();2.3.1 完整代码
#include "ADC/bsp_adc.h"
/**
******************************************************************************
* @file adc.c
* @brief This file provides code for the configuration
* of the ADC instances.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2024 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
ADC_HandleTypeDef hadc2;
/* ADC2 init function */
void ADC2_Init(void)
{
/* USER CODE BEGIN ADC2_Init 0 */
/* USER CODE END ADC2_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC2_Init 1 */
/* USER CODE END ADC2_Init 1 */
/** Common config
*/
hadc2.Instance = ADC2;
hadc2.Init.ClockPrescaler = ADC_CLOCK_ASYNC_DIV2;
hadc2.Init.Resolution = ADC_RESOLUTION_12B;
hadc2.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc2.Init.GainCompensation = 0;
hadc2.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc2.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc2.Init.LowPowerAutoWait = DISABLE;
hadc2.Init.ContinuousConvMode = DISABLE;
hadc2.Init.NbrOfConversion = 1;
hadc2.Init.DiscontinuousConvMode = DISABLE;
hadc2.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc2.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc2.Init.DMAContinuousRequests = DISABLE;
hadc2.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc2.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc2) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_17;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC2_Init 2 */
/* USER CODE END ADC2_Init 2 */
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspInit 0 */
/* USER CODE END ADC2_MspInit 0 */
/* ADC2 clock enable */
__HAL_RCC_ADC12_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**ADC2 GPIO Configuration
PA4 ------> ADC2_IN17
PA5 ------> ADC2_IN13
*/
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN ADC2_MspInit 1 */
/* USER CODE END ADC2_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspDeInit 0 */
/* USER CODE END ADC2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC12_CLK_DISABLE();
/**ADC2 GPIO Configuration
PA4 ------> ADC2_IN17
PA5 ------> ADC2_IN13
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_4);
/* USER CODE BEGIN ADC2_MspDeInit 1 */
/* USER CODE END ADC2_MspDeInit 1 */
}
}
uint32_t Get_Adc(void)
{
uint32_t Adc_Value;
HAL_ADC_Start(&hadc2);
HAL_Delay(1);
Adc_Value = HAL_ADC_GetValue(&hadc2);
return Adc_Value;
}
uint32_t Get_PA4(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
sConfig.Channel = ADC_CHANNEL_17;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
GPIO_InitTypeDef GPIO_InitStruct = {0};
/**ADC2 GPIO Configuration
PA4 ------> ADC2_IN17
PA5 ------> ADC2_IN13
*/
GPIO_InitStruct.Pin = GPIO_PIN_4;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
return Get_Adc();
}
uint32_t Get_PA5(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
sConfig.Channel = ADC_CHANNEL_13;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
GPIO_InitTypeDef GPIO_InitStruct = {0};
/**ADC2 GPIO Configuration
PA4 ------> ADC2_IN17
PA5 ------> ADC2_IN13
*/
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
return Get_Adc();
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
2.4 测试

测试结果表明实验成功。
3、方法二(扫描模式)
3.1 使用CubeMx配置
设置IN13与IN17为Single-ended
在Parameter Settings中
设置Clock Prescaler为Synchronous clock mode divided by 2
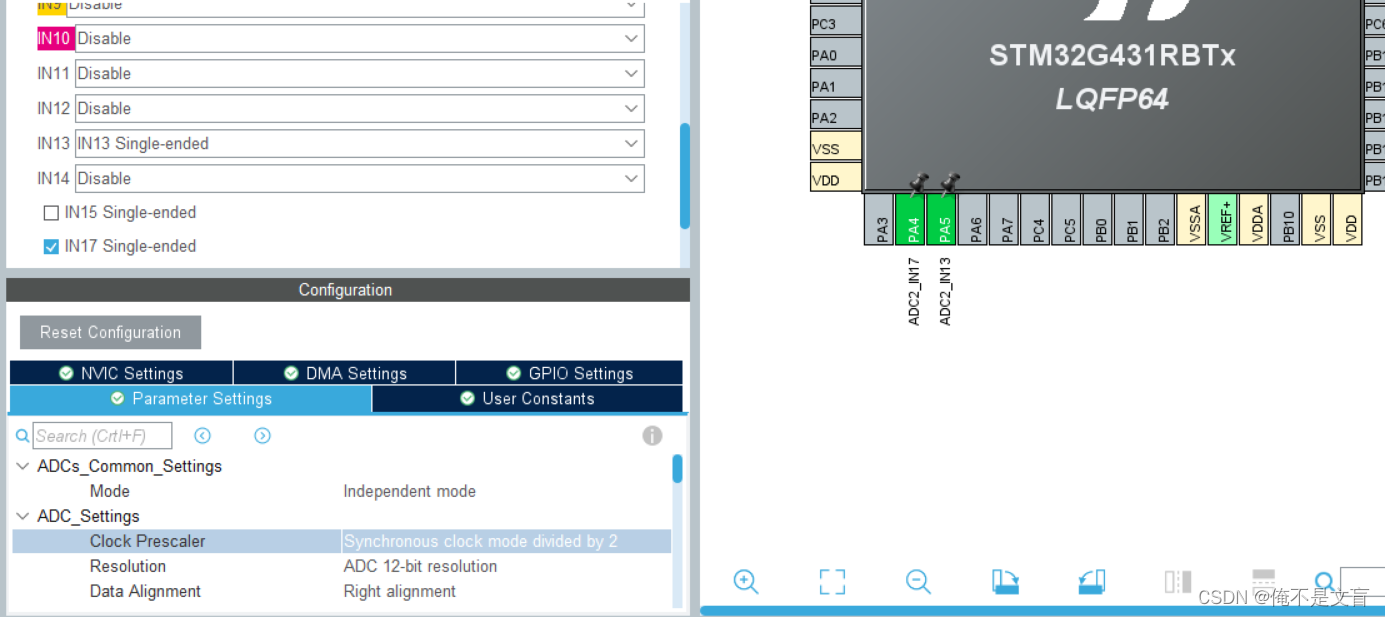
这里要将Number Of Conversion设置为2
这样就可以采集两个不同的通道了

3.2 bsp_adc.h代码编写
因为需要循环采集两个ADC值,所以GetADC函数的参数是一个uint32_t指针类型
#include "main.h"
extern ADC_HandleTypeDef hadc2;
void ADC2_Init(void);
void GetADC(uint32_t *ADC_Val);3.3 bsp_adc.c代码编写
HAL_ADC_Start之后,在for循环内进行连续的HAL_ADC_GetValue,在这之前先等待一下不然可能出现通道AD对应错误的情况。
void GetADC(uint32_t *ADC_Val)
{
HAL_ADC_Start(&hadc2);
int i;
for(i=0;i<2;i++)
{
HAL_Delay(1);
ADC_Val[i] = HAL_ADC_GetValue(&hadc2);
}
}3.3.1 完整代码
#include "ADC/bsp_adc.h"
ADC_HandleTypeDef hadc2;
void ADC2_Init(void)
{
/* USER CODE BEGIN ADC2_Init 0 */
/* USER CODE END ADC2_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC2_Init 1 */
/* USER CODE END ADC2_Init 1 */
/** Common config
*/
hadc2.Instance = ADC2;
hadc2.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc2.Init.Resolution = ADC_RESOLUTION_12B;
hadc2.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc2.Init.GainCompensation = 0;
hadc2.Init.ScanConvMode = ADC_SCAN_ENABLE;
hadc2.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
hadc2.Init.LowPowerAutoWait = DISABLE;
hadc2.Init.ContinuousConvMode = DISABLE;
hadc2.Init.NbrOfConversion = 2;
hadc2.Init.DiscontinuousConvMode = DISABLE;
hadc2.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc2.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc2.Init.DMAContinuousRequests = DISABLE;
hadc2.Init.Overrun = ADC_OVR_DATA_PRESERVED;
hadc2.Init.OversamplingMode = DISABLE;
if (HAL_ADC_Init(&hadc2) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_17;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_640CYCLES_5;
sConfig.SingleDiff = ADC_SINGLE_ENDED;
sConfig.OffsetNumber = ADC_OFFSET_NONE;
sConfig.Offset = 0;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
/** Configure Regular Channel
*/
sConfig.Channel = ADC_CHANNEL_13;
sConfig.Rank = ADC_REGULAR_RANK_2;
if (HAL_ADC_ConfigChannel(&hadc2, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC2_Init 2 */
/* USER CODE END ADC2_Init 2 */
}
void HAL_ADC_MspInit(ADC_HandleTypeDef* adcHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspInit 0 */
/* USER CODE END ADC2_MspInit 0 */
/* ADC2 clock enable */
__HAL_RCC_ADC12_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**ADC2 GPIO Configuration
PA4 ------> ADC2_IN17
PA5 ------> ADC2_IN13
*/
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN ADC2_MspInit 1 */
/* USER CODE END ADC2_MspInit 1 */
}
}
void HAL_ADC_MspDeInit(ADC_HandleTypeDef* adcHandle)
{
if(adcHandle->Instance==ADC2)
{
/* USER CODE BEGIN ADC2_MspDeInit 0 */
/* USER CODE END ADC2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_ADC12_CLK_DISABLE();
/**ADC2 GPIO Configuration
PA4 ------> ADC2_IN17
PA5 ------> ADC2_IN13
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_4|GPIO_PIN_5);
/* USER CODE BEGIN ADC2_MspDeInit 1 */
/* USER CODE END ADC2_MspDeInit 1 */
}
}
void GetADC(uint32_t *ADC_Val)
{
HAL_ADC_Start(&hadc2);
int i;
for(i=0;i<2;i++)
{
HAL_Delay(1);
ADC_Val[i] = HAL_ADC_GetValue(&hadc2);
}
}
3.4 测试

测试结果表明实验成功。
4、总结
本文介绍了两种不同的AD多通道采集的办法,并实现了相关代码以及进行了验证,效果表明成功实现了多路的AD采集功能。
















 308
308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









