






文献来源:
摘要:
无线保真(WiFi)室内定位引起了众多研究者的关注。它面临着许多挑战,主要问题是定位精度低,这阻碍了它的广泛应用。为了提高精度,我们提出了一种基于粒子群优化(PSO)的支持向量回归(SVR)的WiFi室内定位算法,称为PSOSVRPos。SVR算法通过在高维空间中建立信号特征与空间坐标的映射关系,将定位问题作为回归问题来解决。粒子群算法主要研究支持向量回归模型的全局最优参数估计。定位实验在一个开放数据集(1511个样本,154个特征)上进行。PSOSVRPos算法的定位精度平均绝对误差为1.040 m,均方根误差(RMSE)为0.863 m, 1米内误差为59.8%。实验结果表明,与基于卷积神经网络(CNN)的最先进算法相比,PSOSVRPos算法可以将RMSE(35%)和误差降低到1 m(14%)以内,是一种精确的WiFi室内定位方法。
1. Introduction
室内定位在室内导航、应急救援、自动驾驶、智能仓储、智慧校园、智能家居等领域发挥着至关重要的作用(B. Jang & Kim, 2019;刘峰等,2020;Moder, Reitbauer, wiisol, Wilfinger, & Wieser, 2018;Puckdeevongs, Tripathi, Witayangkurn, & Saengudomlert, 2020;Yassin等人,2016)。对高精度室内定位服务的需求是必要和迫切的。有很多室内定位技术,例如无线保真度(WiFi) (Ashraf, Hur, & Park, 2019;Liu et al., 2019;Seong & Seo, 2018),蓝牙(Puckdeevongs et al., 2020;周诚,袁,刘,邱,2017),地磁场(施,何,冯,2021;M. Sun et al., 2022),超宽带(UWB) (Ardiansyah, Nugraha, Han, Deokjai, & Kim, 2019;B. Li, Zhao, & Sandoval, 2020),超声波(Carotenuto, Merenda, Iero, & G. Della Corte, 2020;Chen et al., 2021),计算机视觉(Jeong, Min, & Park, 2021;Jin, Ko, & Lee, 2018),可见光(Bai et al., 2021;Bakar, Glass, Tee, Alam, & Legg, 2021),伪卫星(Sun, Wang, & Chen, 2021;B. Yu et et ., 2021)和惯性测量单元(IMU)(Feng, Wang, He, Zhuang, & Xia, 2020;文,余,李,张,张,2020;王、周、英、李,2022)。利用计算机视觉或伪卫星技术可以达到毫米级的定位精度。但它们仅限于实验场景或设备。例如,计算机视觉对光线很敏感,在差异较小的场景中往往会失败。伪卫星的高精度定位需要特定的设备。其他定位方法可以实现从亚米级到米级的定位精度。借助密集部署的WiFi、蓝牙、超宽带、光站或超声波站,这些方法可以根据距离、角度或指纹快速获得绝对位置。地磁场定位方法可以利用指纹获得绝对的米级结果。但单独使用IMU的方法只能输出相对定位结果。IMU通常与其他传感器一起使用,因为它不容易受到外部环境的干扰。复杂多变的室内环境,多样的室内结构和布局,以及移动的行人,使得任何技术都难以实现通用的高精度室内定位(Cheema, 2018;hanke & Silva, 2021;Nguyen, Luo, Li, & Watkins, 2021)。因此,通常采用多传感器组合的形式,如WiFi与IMU融合、蓝牙与IMU混合、WiFi、地磁场、IMU融合等。其中,WiFi和IMU在准确性、通用性等方面是最佳组合(Ashraf, Hur, & Park, 2020;Chen & Chen, 2017;Nguyen et al., 2021)。
WiFi室内定位技术的一个巨大优势是WiFi设备的广泛存在。不需要部署额外的设备。设备的成本几乎为零,可以忽略不计。此外,WiFi室内定位技术在大尺度室内环境下可实现1~5米的定位精度(L. Li, Guo, & Ansari, 2019;刘伟等,2020;Wang et al., 2020)。这是一项非常具有成本效益和竞争力的技术。鉴于IMU和融合算法已经得到了广泛的研究和完善,WiFi定位还有很多改进的地方。只要WiFi定位达到更高的精度和稳定性,WiFi与IMU融合的定位效果就会更好。因此,许多研究者将研究重点放在WiFi室内定位技术上,使其越来越有可能成为一种通用的、高精度的室内定位方法。这也是本研究的目的。
广泛使用的商用WiFi接入点(AP)支持IEEE 802.11 a/b/g/n/ac/ax协议。只有compulsory ab和谷歌提供支持IEEE 802.11 mc协议的WiFi ap,这些特定的ap价格昂贵。从前一种商用WiFi信号中可以提取两种信息,即接收到的信号强度(RSS)和信道状态信息(CSI),从后一种特定WiFi信号中提取往返时间(RTT)。目前,CSI (W. Liu et al., 2020)和RTT (Seong, Lee, Kim, & Seo, 2021) WiFi室内定位方法都可以达到亚米级的定位精度,满足高精度室内定位的需求。但CSI和RTT方法都需要专门的设备,而且所有的研究都在实验室进行。目前,它们还难以广泛应用于室内通用定位。
与CSI和RTT不同,RSS可以很容易地通过智能手机、平板电脑、笔记本电脑等获得,这表明基于RSS的WiFi室内定位方法具有很好的通用性。基于rss的WiFi室内定位方法分为基于距离的和基于指纹的两大类。基于RSS方法通过将RSS值转换为基于各种模型的距离来实现位置估计,如对数路径损失模型(Eleryan, Elsabagh, & Youssef, 2011)、多坡度模型(Ji, Biaz, Pandey, & Agrawal, 2006)、多墙多层模型(Torres-Sospedra et al., 2014)等。然而,由于室内结构复杂、室内布局多样、信号反射、衍射、散射严重、设备非均质性等原因,基于距离的RSS定位方法定位精度较差。由于定位精度较高,基于指纹是最常用的方法。它包含两个阶段,一个是离线阶段,即构建离线指纹数据集,另一个是在线阶段,即估计目标的位置。
将许多经典的机器学习算法引入到基于RSS的WiFi指纹室内定位方法中。K最近邻(KNN) (Bahl & Padmanabhan, 2000;Xie, Wang, Nallanathan, & Wang, 2016),加权KNN (C. Li, Qiu, & Liu, 2017)和Bayes推理(Youssef & Agrawala, 2008)是较早的定位算法。然后,采用几种聚类算法来提高效率,降低定位精度,特别是在大规模室内环境下。为了进一步提高定位性能,还探索了一些复杂的算法及其变体,如支持向量机(SVM)、高斯过程、随机森林、人工神经网络(ANN)和极限学习机(L. Li et al., 2019; Tao et al., 2020; H. Zou, Jin, Jiang, Xie, & Spanos, 2017)。当然,也引入了热门的深度学习算法来提取和学习复杂的特征,以获得更准确的定位结果。Oh (Oh & Kim, 2021)探索了深度神经网络(DNN)模型,在6000平方米的室内面积下实现了3.6~3.8米的平均绝对误差(MAE)。kassanov (kassanov, Nurpeiissov, Sarkytbayev, Kuzdeuov, & Varol, 2021)采用递归神经网络(RNN)模型,使用公共WiFine数据集获得3.05米的MAE。Li (d.l i et al., 2021)探索了一种卷积神经网络(CNN)模型,在600平方米的室内面积下,MAE为1.86米,95%误差在5.41米以内。但是这些最先进的复杂模型需要大量的离线训练时间和计算资源。而大多数智能终端不具备支持这些模型的能力。这样的定位性能不能满足精确定位的要求,因此,提高指纹定位方法的精度是非常必要的。此外,指纹定位方法仍然面临许多困难(hanke & Silva, 2021;Khalajmehrabadi, Gatsis, & Akopian, 2017;psamurez - navarro et al., 2019),如指纹采集、异构设备、指纹数据库维护、大规模应用等。
为了实现WiFi室内精确定位,提出了一种基于粒子群优化(PSO)的支持向量回归(SVR)室内定位算法。利用SVR算法构建多个反映高维空间信号特征与空间坐标映射关系的回归模型,回归模型通过求解回归问题实现局部化,粒子群算法可以更快、更高效地找到SVR算法的全局最优参数估计。该算法根据坐标的维度训练两个或三个坐标模型,而不是为房间或区域训练一个模型。这些模型可以基于联合估计输出坐标,并受益于探索更多的信息。
本文的其余部分组织如下。第2节详细回顾了基于svm和基于cnn的WiFi室内定位算法的相关工作。在第3节中,我们提出了基于粒子群算法优化的支持向量回归模型的定位算法。第4节简要介绍了实验数据,并根据实验结果进行了丰富的分析。最后进行了讨论并得出结论。
5、Discussions and Conclusions
在本节中,首先讨论了PSOSVRPos算法获得更好定位性能的原因,以及在大覆盖数据集上的应用,以及适用的场景。然后,得出了一些结论。
5.1 Discussions
可以明显看出,与SVM算法相比,PSOSVRPos算法的定位精度提高非常大。MAE降幅约为84.5%,RMSE降幅约为81.7%。定位精度和精确定位性能的显著提高完全说明粒子群算法可以获得支持向量机算法的全局最优参数。PSOSVRPos算法之所以具有良好的定位性能,主要原因是在适应度函数(MSE)的驱动下,通过迭代从不断进化的粒子群中找到全局最优粒子,从而使定位误差逐渐减小。

虽然PSOSVRPos算法的整体定位精度优于CCpos算法。从图8可以看出,PSOSVRPos算法预测的测试点分布较为杂乱。CCpos算法预测的位置大多集中在测试点x方向的一个小范围内。造成这种现象的主要原因是两个测点之间方向的最大间隔约为3.4米,而PSOSVRPos算法无法在如此短的距离内建立准确的回归模型。而CNN作为一种细粒度的算法,可以学习到很多细节,并且在x方向上表现得更好。这也表明 PSOSVRPos算法在y方向上的精度远远高于CCpos y算法。
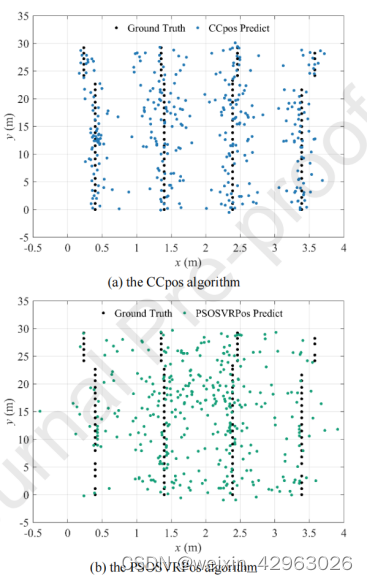
图8。采用两种算法对测试点进行预测,蓝色实体点采用CCpos算法预测,绿色实体点采用PSOSVRPos算法预测。
Alcala Tutorial数据集的覆盖范围很小。长约30米,宽约4米。数据集包含1511个样本,每个样本包含154个特征。PSOSVRPos算法在这个小范围的数据集上表现出更好的定位性能。虽然目前还没有在JIIndoorLoc等大覆盖数据集上进行定位实验,但这是一个理论上值得探讨的预测。利用聚类分析算法将大覆盖数据集划分为多个覆盖面积小或不同建筑/楼层的数据集。这些分割的小区域通常在大小和形状上各不相同。利用聚类识别和PSOSVRPos算法可以实现大覆盖区域内的定位。聚类识别在很大程度上决定了最终的定位精度,因为许多识别算法会对小区域、建筑物或楼层进行错误识别,从而导致更大的定位误差,而这些误差很容易被忽略。众所周知,大规模应用是室内定位面临的挑战之一。这是一项有价值和意义的研究;然而,这不是我们的目标。由于PSOSVRPos算法不具备聚类分析、建筑物/楼层/小区域识别等能力,因此PSOSVRPos算法不适用于面积较大的室内定位,而室内定位需要对指纹数据集进行分割。
室内结构布局多样。尽管SVR算法可以解决非线性问题,而PSO算法可以提供全局最优参数,但不能保证PSOSVRPos算法在某些特殊场景下仍然有效。PSOSVRPos算法根据坐标的维度分别训练两个或三个模型,模型可以从坐标中挖掘更多的信息,定位结果受益于模型的联合估计。从实验来看,PSOSVRPos算法适用于小区域或走廊。
5.2 Conclusions
提出了一种新的基于粒子群算法优化的SVR精确定位算法(PSOSVRPos),在长30米、宽4米的小型室内环境下,利用WiFi RSS进行位置估计。基于粒子群算法估计的两个关键参数,分别构建了两个SVR定位模型。本实验通过比较两种最先进的WiFi室内定位算法来评估定位精度。利用25 PE、MAE、75 PE、95 PE、RMSE、1 m内误差、2 m内误差、3 m内误差等8个指标对定位精度进行了全面评价。
实验结果表明,CCpos算法(基于cnn的方法)的定位精度MAE为1.050 m, RMSE为1.327 m, 1米内误差为45.8%,而PSOSVRPos算法的定位精度MAE为1.040 m, RMSE为0.863 m, 1米内误差为59.8%。从均方根误差和1米误差两方面来看,定位精度分别提高了35.0%和14.0%左右。此外,PSOSVRPos算法在其他六个指标上的表现也优于CCpos算法。因此,PSOSVRPos是一种优于其他算法的精确WiFi室内定位算法。
PSOSVRPos算法仍然面临两个严峻的挑战,即PSO预先需要很多参数,以及基于大覆盖数据集的定位实验。在未来的工作中,将考虑引入一种聚类算法和另一种优化算法,并研究在大规模覆盖数据集上的精确定位。
















 6001
6001











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









