






文献来源
Sesyuk A, Ioannou S, Raspopoulos M. A Survey of 3D Indoor Localization Systems and Technologies [J]. Sensors, 2022, 22(23): 9380.
摘要
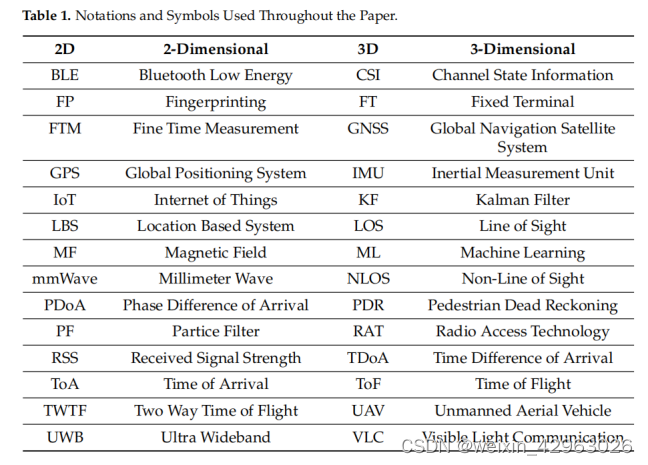
由于全球导航卫星系统(GNSSs)通常在室内环境中失效,室内定位近年来引起了研究人员的极大兴趣。在过去的几十年里,已经有一些文献报道了一些试图解决室内定位问题的工作。然而,大多数工作只专注于二维(2D)定位,而很少有论文考虑三维(3D)。此外,关注3D室内定位的综述论文也较少;因此,本文旨在对室内三维定位的最新技术进行调查和详细的综述,包括到达角(angle of arrival, AoA)、到达时间(time of arrival, ToA)、到达时间差(time difference, TDoA)等几何方法,基于接收信号强度(Received Signal Strength, RSS)、信道状态信息(Channel state Information, CSI)、磁场(Magnetic Field, MF)和精细时间测量(Fine time Measurement, FTM)的指纹方法,以及基于融合和混合定位技术。我们提供多种技术,重点是可用于3D室内定位的无线技术,如WiFi、蓝牙、超宽带、毫米波、可见光和声音技术。批判性地分析了3D定位中每种方法/技术的优缺点。
关键词:三维室内定位;基于位置的服务;物联网
1. 前言
几个世纪以来,科学家们一直着迷于确定位置的想法。第一个定位系统出现在几千年前,当时人们在旅行时需要知道自己的位置,通常在建立自己的地标(小路、灯塔等)之前使用自然地标来确定自己的方位。随后,又引入了其他方法,如天体和天文方法以及海洋航行的航位推算。然而,它们中的大多数在范围上极其有限,而所有这些都依赖于视觉观察,至少在某种程度上,因此需要在光源和用户之间定位清晰的视线。这限制了它们在一天中的特定时间或特定天气条件下的使用。19世纪末无线电波的发现为基于无线电的导航/定位铺平了道路。射频信号具有比可见光更大的传输范围,而它可以通过云或雾传输,甚至可以作为地波传播很远的距离,这取决于传输频率,克服了地面和卫星导航系统的距离问题[1]。
多年来,基于位置的服务(LBS)、应用程序和系统一直在我们的生活中扮演着重要的角色。使用全球导航卫星系统(gnss)已经非常成功地实现了户外定位,这是无线定位中典型的事实上的方法。多年来建立了各种GNSS,如美国的全球定位系统(GPS),俄罗斯的全球导航卫星系统(GLONASS)和欧洲的伽利略(还有中国的北斗)。全球导航卫星系统至少需要三颗卫星来确定地球上的具体位置,还需要一颗卫星来进行时间同步。因此,这些卫星与被定位的接收设备之间必须有一条畅通的路径。 因此,阴影严重的城市地区(密集和高层建筑的地区,通常被称为“城市峡谷”)或室内区域无法得到全球导航卫星系统的可靠支持。因此,在过去的20-30年里,文献[2]报道了大量的工作,其中包括多年来使用当前可用的无线电技术解决卫星拒绝环境中定位问题的许多解决方案和方法。然而,这些解决方案都没有被标准化为这种环境的通用解决方案(如户外GNSS)。可以找到各种各样的原因,例如对越来越高的精度的增量需求,无线(和其他)技术的快速发展促进了对这种更高精度的支持,这使得采用一种系统变得不合理,如果它将在不久的将来过时,在移动设备中集成的底层技术的成本和成熟度等。文献中已经提出了几种尝试,通过将数据与IMU传感器融合来提高GNSS定位,尽管[3]中的精度确实提高了20%或[4]中的精度提高了38%,但尚未发现有足够的努力可以为室内环境提供足够准确的结果。此外,定位精度相对取决于所使用的应用。例如,典型的GPS级精度(3-10m)足以用于汽车导航,而房间级精度(2-4m)足以识别房间或室内环境区域中有人的存在[5,6]。
2020年,全球室内定位和室内导航市场价值为61亿美元,预计从2020年到2025年将以22.9%的复合年增长率(CAGR)增长,到2025年将达到170亿美元。信标在相机、LED照明、销售点(PoS)设备和数字标牌中的集成越来越多;智能手机、联网设备和定位应用的普及;以及GPS技术在室内环境中的低效率正在推动室内定位市场的全球采用。2019年开始的新冠肺炎疫情对室内定位市场产生了影响;但是,企业现在正在使用它进行设施管理、病毒监测、人员跟踪和管理以及智能隔离。政府和各行业的私人组织正在采用室内定位解决方案,使居民留在室内并对其进行跟踪。例如,Inpixon正在免费或减价(取决于解决方案)向医疗保健提供商和其他组织提供基于位置的技术应用程序和服务,以帮助控制COVID-19的传播或管理大流行的影响,以确保公民的安全和福祉[9,10]。
在过去的几十年里,已经提出了几种定位系统,并使用不同的技术和方法来解决室内定位问题。大多数这样的系统只在两个维度上解决问题,这意味着只在水平(x-y)平面上估计位置,忽略了垂直(z)维度。这样做的一个实际影响可能是无法识别设备是放在口袋里还是举得很高,或者用户是在购物中心的一楼还是一楼(见图1)。在某些情况下,这些额外的定位数据可能至关重要。例子可能包括用于温室作物播种和施肥的无人机,在这种情况下,了解无人机相对于作物的高度是很重要的,或者用于搜救行动的无人机,用于营救峡谷中的登山者或矿井中的矿工,在这些情况下,GNSS可能会失灵。在大多数情况下,需要优于亚米级的精度,以避免无人机在障碍物上坠毁。精确的三维定位还可以在支持无线通信方面找到应用,并在天线定向和波束形成[11]、导频分配[12]、信道预测和资源分配[13]等方面发挥作用。此外,由于世界人口的快速增长,不仅现在的建筑物是向上建造的(摩天大楼),而且城市的道路交通也在增加,这最终将导致以隧道形式的自动驾驶地下城市的发展,GPS将不再能够提供定位和导航。3D定位方法能够识别无人机在空间中的准确位置,例如在城市峡谷场景中,这一事实也可以扩展到利用更合适的测距技术(例如声学)对水下设备进行精确定位[14-16]。
在过去的十年里,室内定位/导航技术有了巨大的发展;然而,与户外、成熟的全球导航卫星系统相比,目前还没有一种技术能够负担得起,供一般市场采用。
有很多因素可以在提高定位精度方面发挥作用,例如信号衰减,NLOS条件甚至身体阴影,因此为了达到最准确的结果,室内定位系统的精度至关重要。虽然文献中有几篇关于二维室内定位的论文,但据我们所知,还没有对三维室内定位进行过全面的调查。因此,在本文中,我们讨论了现有的三维室内定位技术和技术,并为该领域的三维定位需求建立了先例。
此外,我们的工作遵循直观的流程,强调室内定位的挑战和问题,并概述现有的解决方案。5g相关技术的利用已成为未来3D室内定位的发展趋势。5G通过MIMO(多用户多输入多输出)天线运行,它在一个特定的方向上提供信号的精确方向,而不是多向广播。5G技术可以实现厘米级的室内3D定位精度;然而,它们尚未达到必要的全球执行水平。随着更多支持5g的设备的迅速崛起,这种情况很快就会改变。关于下一代(6G)无线系统的讨论已经开始,设想了精确的定位和传感系统,因为人们相信6G系统将加速向更高频率操作的过渡,例如毫米波和太赫兹范围,以及更宽的带宽。
显然,6G通信为定位和传感带来了一系列新的挑战和机遇,[17]的作者将其总结为五个关键研究问题:
- 如何利用6G中使用的一系列技术实现厘米级3D定位/传感精度?
- 除了提供基本的通信优势外,如何设计新的波形设计来更好地促进定位和传感?
- 如何在6G系统的高频和高度移动和动态环境中支持能源效率,高定位/传感精度和(我们也说)低成本?
- 实时节能AI/ML算法能否进一步促进和支持定位和传感过程?
- 如何在主动和被动感知之间架起质量和精度的桥梁?
本调查报告通过研究各种知名期刊上发表的各种书籍、文章和论文,重点研究了专门针对三维室内定位系统的研究,以及促进这些系统的技术和技术。虽然本文主要关注的是室内定位,但有些章节可能会包括室外定位的例子,比如无人机导航,因为这两种情况的原理相似,都不能准确地预测使用卫星的垂直定位。此外,由于已有大量文献报道,本文不包括二维室内定位研究。
本文的其余部分组织如下:
•第2节:我们讨论了不同的3D定位技术,如AoA、ToA和TDoA等几何方法。
此外,我们还讨论了指纹识别方法,因为它们是基于RSS, CSI, MF和FTM等指标的广泛使用的方法之一。此外,我们还讨论了传感器融合的原理和具体的滤波方法,如卡尔曼滤波和粒子滤波,以及协同定位和PDR。在本节的最后,我们讨论了定位方法的融合,也称为混合定位系统和文献中发现的现有系统。
•第3部分:我们提供各种技术,重点是可用于3D室内定位的无线技术,如WiFi,蓝牙,超宽带,毫米波,可见光和基于声音的技术,如声信号和超声波。我们分析了每种技术的优缺点,重点讨论了它们在三维定位中的适用性。
•第4节:我们讨论了用于3D室内定位的机器学习原理,并提供了迄今为止文献中报道的各种现有系统。
•第5部分:我们提供了关于调查的关键讨论和结论。

图1。三维室内定位应用实例在一个多层商场(作者未知(https://meet.bnext.com.tw/blog/view/3442?(于2022年11月26日访问)
2. 3D 定位技术
在本节中,对3D定位技术的现状进行了回顾。本文综述了几何、基于指纹、基于传感器融合以及混合方法,并根据文献报道的工作对其3D定位性能进行了批判性评估和量化。在表2本节的末尾,可以找到所有几何方法的总结,描述了它们的优点和缺点,以及它们在文献中发现的准确性。
2.1. 几何方法
2.2. 指纹方法
另一种方法是指纹识别(FP)。FP过程由在线和离线两个阶段组成。在离线阶段(也称为数据收集阶段),在已知环境的多个不同位置获得接收信号强度(RSS)测量值。
这些测量的指纹是预先存储的,然后在将它们与在线阶段收集的测量信号进行比较时用作参考,以估计用户位置[36,37]。指纹技术由于其无需额外硬件、空间布局或AP位置信息即可实现定位估计的能力而获得了普及。这种技术的一个优点是它们可以用于各种室内环境,甚至包括地下[38]。指纹识别提供了对用户位置的离散估计,而不是连续估计。技术上,通过减小离线测量位置之间的距离,增加指纹场的密度,可以提高位置估计的精度,直至实现几乎连续的位置估计。
然而,由于信道统计和测量噪声的影响,相邻两个点之间的信号强度差异会变得相当大,使得对[2]的正确位置估计几乎不可能。RSS指纹的值可能经常由于信号干扰而波动,例如物体移动、门的打开/关闭和给定环境中的人数。因此,需要不断更新和校准[38]的“指纹图”。这导致了一个巨大的缺点,因为它需要大量的精力和时间来更新指纹,特别是在大型建筑中。一种解决方案是使用通道模型来构建指纹地图。例如,在[39]中,使用3D射线跟踪构建了FP地图,并使用一组跨环境手动收集的数据对该地图进行了校准,以为多种类型的设备进行校准。
解决该问题的另一种方法是在[40]中提出的众包映射。换句话说,这被称为协作定位技术。在这些系统中,利用用户获取并明确标注的指纹来构建和维护无线电地图。然而,用户的输入质量可能会影响协作系统的定位精度。基于这些原因,一些替代技术探索了整合在手机中的惯性传感器和接口,以使用用户运动模式[38]生成无线电地图。下一节将进一步讨论协作定位的原理。
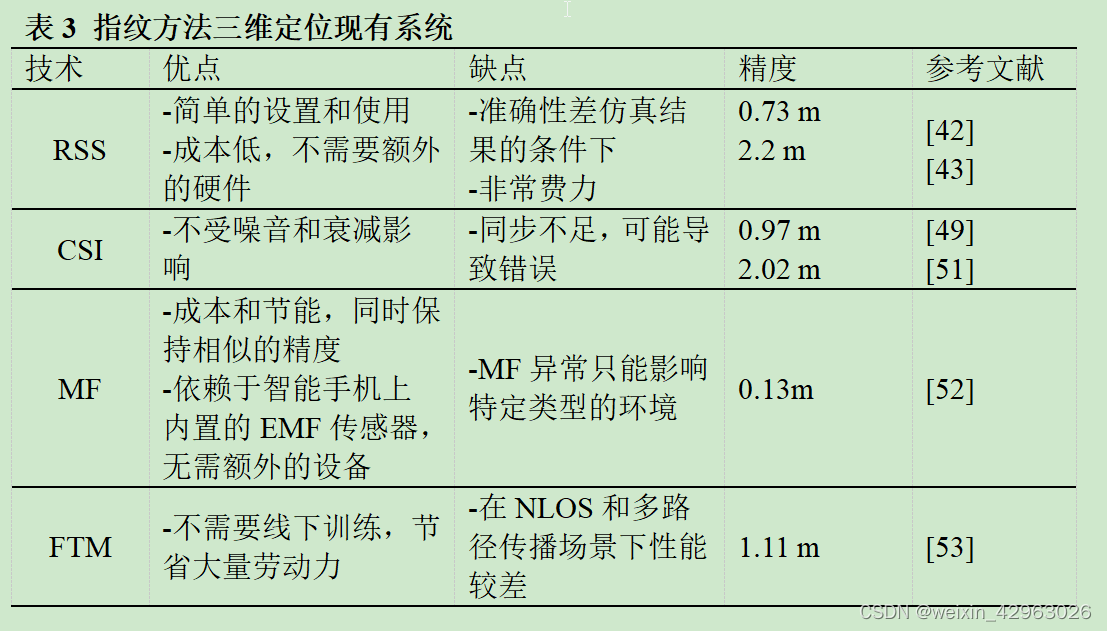
在本节最后的表3,可以找到所有指纹识别方法的摘要,描述了它们的优缺点,以及它们在文献中发现的准确性。
2.2.1. 基于RSS的指纹
接收信号强度(RSS)是通过测量接收器处的信号功率来获得的。它可以直接用作指纹,也可以插入信号模型方程中,以确定发射设备和接收设备之间的距离。信号的强度与设备之间的距离成正比——发送端和接收端的距离越近,RSS值越大。
RSS通常与其他技术和方法一起使用,如Wi-Fi、超声波、ZigBee、UWB和[36]指纹识别方法。由于其简单、低成本,基于RSS的定位方法是最常用和应用最广泛的定位技术。然而,在某些场景下(如非视距条件下),由于穿墙传输和建筑物内人员移动等其他可能的障碍导致信号衰减增加,以及多径衰落和噪声引起的RSS过大波动,定位精度较差。为了抵消这些问题,可以应用几种滤波器或平均机制;然而,在大多数情况下,为了获得较高的定位精度,必须采用相对复杂的[2]算法。
例如,在[41]中,卡尔曼滤波器用于消除RSS数据中的大部分噪声,从而提高精度。利用广泛应用于控制系统等领域的奇异值分解(Singular Value Decomposition, SVD),建立了一个三维环境下的多边定位问题,以估计目标节点的位置。对于给定的一组参考节点,参考节点和目标节点之间的距离使用RSS近似,然后可以计算出目标节点的位置,即3D坐标。
Woodman和Harle[42]描述了另一种获取相对较好的定位精度以及当前位置在z轴上精确连续信息的方法。整个系统进行了实验评估,使用独立的地面真实值跟踪系统。实验结果表明,该系统能够在3层8725 m2的建筑中,75%的时间内跟踪到0.5 m以内,95%的时间内跟踪到0.73 m以内。
在[43]中,通过实现和扩展等值线和欧氏距离算法,将基于二维RSS的无线局域网指纹定位技术扩展到三维。第三个维度被离散地视为楼层。两种算法分别在大学和博物馆两个不同的环境中进行了测试。在大学实验平台上,等值线算法和欧氏距离算法的平均正确率分别为86.67%和93.33%。在博物馆测试平台上,等值线算法达到96.84%,欧氏距离算法达到100%。
2.2.2.基于CSI的指纹识别
信道状态信息(Channel State Information, CSI)是指在建立无线通信时已知的通信链路的信道属性。通过这些信息,就可以确定发送端和接收端之间信道的传播特性。这提供了获取信息的途径,如散射、衰落和功率衰减随距离而变化,这通常是传统RSS测量无法提供的。
大多数基于Wi-Fi的室内定位技术可以分为两大类:基于RSS和基于CSI。然而,在室内环境中,RSS信号作为一种粗粒度信息,极易受到其他信号的干扰和室内多径效应的影响,因此无法提供足够的准确性和可靠性[44,45]。
对于采用IEEE 802.11n[46]通信协议的Wi-Fi信号,通过修改无线网卡驱动程序[47],可以在正交频分复用(OFDM)子载波中获取CSI。
将CSI分为两类:(a)信道冲激响应(CIR)和(b)信道频率响应(CFR)。CIR是复数信道的时域表示,以时间为单位描述信道的幅值和相位,而CFR是复数信道的频域等效表示,以频率子载波表示复数信道。
CIR需要产生脉冲信号,而CFR可以用正交频分复用(OFDM)器件简单地恢复。 由于同步不足,CIR也更容易出错。相位补偿技术有助于解决CFR的同步问题。
CSI指纹比RSS指纹更值得推荐,因为它可以在LOS和NLOS场景中与单个AP一起工作。由于许多射频系统使用OFDM,它可以达到厘米级的高定位分辨率,并且可以被现有的基础设施[48]支持。
针对本课题报道的工作,[49]的研究人员设计了一种基于CSI的无人机跟踪导航定位系统。正如作者所说,有了无人机技术,由于一个共同的问题和所谓的“黑飞”现象,涉及非法侵入某些地区,如机场、加油站、核电站、石化工厂、拘留中心和其他[50],有必要引入必要的对策。该系统首先监测无人机与控制器之间的通信信息并分析CSI;其次,对直接LOS信号估计出方位角(angle of方位角,AoA)和仰角(angle of elevation, EOA),利用该定位模型计算出无人机的位置;最后,应用无线Insite (WI)对该系统进行验证,该系统是一款使用射线追踪模型方法应用和分析无线电传输和无线通信系统的操作方面的仿真软件。测试结果表明,二维位置误差在1.1 m左右,三维位置误差在2.02 m左右。
机器学习(ML)(见第3节)也被用于CSI。以[51]为例,介绍了WiCluster,它使用一种新的ML技术进行无源室内定位。WiCluster可以在训练过程中预测区域级别和精确的2D或3D位置,而不需要精确的位置标签。首先,基于CSI的室内定位研究主要集中在非参数数字信号处理(DSP)技术上。然而,最近的重点已转移到参数方法(例如,完全监督的ML方法)。然而,这些方法不能很好地处理现实世界环境的复杂性,也不能满足大规模商业部署的要求:基于dsp的方法的精度在非视距条件下显著下降,而有监督的ML方法需要大量难以获得厘米精度的位置标签。另一方面,WiCluster是精确的,它需要较低的标签信息,这些信息很容易获得,并在非视线设置中工作良好。该系统在三个独立的现实环境中展示了米级别的精度:两个办公室和一个多层建筑。平均精度约为0.97 m。该定位系统即使在与发射机或接收机没有直接视线的房间也能有效工作。
2.2.3.基于磁场的指纹识别技术
尽管大多数指纹识别技术都是基于Wi-Fi RSS测量,但近年来,基于磁场(MF)的位置指纹识别技术在利用磁场异常进行室内定位方面取得了重大进展。地球磁场(EMF)是一种无处不在的和特定位置的信号。由于钢框架建筑的局部磁场会受自然和人为(如钢筋混凝土结构、电流和电子设备)的影响,从而导致建筑内部局部磁场的异常,因此它是一种很有希望用于精确的全局自定位的资源。与其他现有室内定位系统相比,MF系统在保持相同精度的同时更具成本和节能性,它依赖于智能手机上的内置EMF传感器,而不需要额外的设备[37]。另一方面,MF异常只会影响特定类型的区域。由于智能手机内置传感器的灵敏度限制,接收到的局部MF信号的有限分辨能力可能导致在远离干扰的区域内多个位置具有相同的MF位置信息。这使得区分相同局部MF值的不同位置非常具有挑战性。[52]作者引入了一种基于3D mf的跟踪系统,使用卡尔曼滤波器对记录的数据进行分析,以消除运动影响造成的重叠,从而获得移动台和参考点之间的可靠距离和高程测量。实验结果表明,在典型的室内环境下,该算法相对水平面和z值在0.5 ~ 1.5 m范围内均可获得较好的定位精度。为了进一步完善和辅助MF定位系统,在[37]中引入了一种基于视觉的摄像机辅助室内定位系统。这种基于视觉的定位方法与以往的基于指纹的定位系统类似,使用图像特征点作为匹配资源。通过将查询图像与预先构建的图像数据库进行比较,可以确定用户捕获图像的位置。与以前的系统不同,这种方法可以在室内环境的可视化3D地图上显示用户的位置,允许人们更精确地识别他们的位置。与大多数原始的基于MF的室内定位系统(仅依赖MF指纹识别来寻找个体)不同,这种多管结合的方法通过在干扰较少的地方使用基于相机的视觉定位技术得到了显著改进。实验结果表明,在不同的室内条件下,相机辅助的MF室内定位系统在精度和可靠性方面都优于其他两种系统。与单独使用MF的结果相比,在干扰环境较少和丰富的情况下,相机辅助MF求解的平均误差距离提高了50%以上。
2.2.4. 基于精细时间测量的指纹识别技术
在IEEE 802.11 [54]中标准化的精细定时测量(FTM)协议可以通过飞行时间(TOF)回波技术实现米级定位精度。与许多其他测距测量一样,定位的主要问题之一是缓解NLOS效应[55]。如果在固定终端(FT)和移动终端(MT)之间的直接路径被阻,则信号到达时间(ToA)延迟,引入正偏置。使用这种ToA估计可能会大大降低定位精度[56]。基于指纹的Wi-Fi定位方法主要使用接收信号强度(RSS)或信道状态信息(CSI)来实现。与基于RSS的解决方案相比,这项新技术不需要离线培训,这节省了大量的劳动力[57]。
在此背景下,ref.[53]提出了一种基于Wi-Fi FTM结合内置传感器的实时3D室内定位算法。通过结合从Wi-Fi接入点(ap)获取的接收信号强度指示器和往返时间来进行邻近识别,从而提供更精确的距离结果。利用自适应扩展卡尔曼滤波(adaptive extended Kalman filter, AEKF)估计行人的实时方向和行走速度。此外,使用unscented粒子滤波器将AEKF、邻近检测和Wi-Fi测距结果相结合。将基于Wi-Fi ftm的方法与基于内置传感器的方法相结合,有效提高了定位精度和稳定性。最终二维定位的CDF误差在1.11 m以内,高度误差在0.28 m以内。
2.3.传感器融合
传感器融合是一种结合来自各种传感器的数据,试图最小化定位系统中的误差量的技术。尽管许多没有利用传感器融合的传统定位框架已经通过其他各种方式得到了增强,以减少不确定性或提高精度,但传感器融合框架往往能进一步提高定位精度[58]。传感器融合网络通常根据传感器配置的类型进行分类。[59]有三种主要类型:
•补充:传感器提供关于环境的独立类型的信息。传感器不是直接依赖,但可以结合提供感兴趣领域的更全面的图像。这就解决了传感器数据不足的问题。一般来说,融合互补数据很简单,因为来自不同传感器的数据可以被添加到一起。一个互补的配置将是使用大量的摄像头,每个摄像头都在观看一个房间的不同部分。
•竞争/冗余:如果每个传感器提供相同特性的独立测量,传感器的设计具有竞争性。竞争配置通常通过融合来自不同传感器的数据或融合来自在不同时刻获得的单个传感器的测量数据来区分。
•协作:协同传感器网络利用来自两个(或更多个)独立传感器的信息来提取无法从单个传感器获得的信息。立体视觉是协同传感器配置的一个例子——通过整合来自两个摄像机的略微不同角度的二维图像,形成场景的三维图像。
三种基本的传感器通信方法如下[60]:
•分布式:信息以设定的通信速率在节点之间发送(例如,每五次扫描一次)。
•分散:传感器节点之间没有通信。在分散的系统中,每个节点都会做出自己的决策。系统的最终行为是单个节点的决策的集合。
•集中式:所有传感器都将数据发送到单个节点。集中式系统是分布式方案的一个子集,其中传感器每次扫描都相互作用。
现有的室内定位技术可以分为两类:基于基础设施的方法和无基础设施的方法。基于基础设施的技术通过从外部基础设施或设备(如网络节点、WiFi信号、蓝牙信号、射频信号、磁信号和视频信号)收集数据来实现室内定位。无基础设施定位技术能够在没有任何外部信号的情况下实现室内定位。这些技术大多依赖惯性传感器,如加速度计、磁力计和陀螺仪。即使在复杂的室内环境中,这些传感器也能够获得准确的结果。然而,这些传感器的漂移和偏差缺陷存在主要问题。基于基础设施的解决方案需要安装不同的设备,这在大多数情况下是相当昂贵的,而无基础设施的解决方案更灵活和划算,因为它们涉及已内置到智能设备中的传感器。近年来的趋势是无基础设施的解决方案。然而,这种精度不足以在实际应用中使用[61]。
智能手机提供各种类型的措施,可用于实现室内定位只需使用智能手机的数据。通过添加相对高度信息,如晴雨表数据,并使用适当的滤波,可以很容易地实现三维定位。在表4的本节末尾,可以找到所有传感器融合方法的总结,描述它们的优点和缺点,以及在文献中发现的准确性。
2.3.1.滤波器方法
在许多环境中,来自定位系统的测量仍然包含不必要的噪声,并且测量数据的质量可以使用滤波器[62]来增强。滤波是传感器融合的一个典型例子。两种最常用的滤波方法是卡尔曼滤波器(KFs)和粒子滤波器(PFs)。KFs和PFs将位置概率表示为一组样本(粒子),是最有效的方法之一,因为它们能够适应非线性状态和测量模型,处理多种假设,并无缝地组合不同类型的信息。
卡尔曼滤波器
卡尔曼滤波器(KF)[63]是贝叶斯滤波器[1]最常见的实现之一。卡尔曼滤波是一种算法,它通过估计每个时间帧[41]上变量的联合概率分布,利用随时间观察到的一系列测量值(包括统计噪声和其他不准确性)来产生比单独基于单个测量值更准确的未知变量估计。KFs的关键优势之一是它们仅使用矩阵和向量操作就可以实现高斯过程均值和协方差的计算效率。该算法分两个阶段运行。KF为预测阶段生成当前状态变量的估计,以及它们的不确定性。一旦看到下一次测量的结果(不可避免地受到一些误差的污染,包括随机噪声),则使用加权平均来更新这些估计[64]。该算法仅需要当前输入测量值和先前确定的状态及其不确定矩阵,就能实时工作。对滤波器的扩展和修改,如在非线性系统上运行的扩展卡尔曼滤波器(EKF)[65]和无迹卡尔曼滤波器(UKF)[66],也得到了发展。此外,卡尔曼滤波已被有效地应用于多传感器融合和分布式传感器网络中,产生更分布式的卡尔曼滤波[67]。大多数情况下,采用卡尔曼滤波消除不同系统的系统误差。
文献[61]中报道的工作描述了一种通过将现有2D模型扩展到3D,使用脚装传感器获得3D室内位置的方法。采用零速度势更新(ZUPT)算法检测行人是否停止运动,并将该信息用于卡尔曼滤波以消除系统误差。为获取正确的高度信息,增加3D室内定位气压计,并通过卡尔曼滤波将其与加速度计进行融合。粒子滤波因其处理时间成本高、难以实现可穿戴设备而被去除。所建议的方法已经在许多真实世界和模拟环境中进行了测试。测距误差在1%左右,定位误差小于总移动距离的1%。实验结果表明,该系统的性能优于使用相同低成本imu的同类系统。在[41]中,利用RSS估计参考节点与目标节点之间的距离,从而进行三维位置估计。然而,由于RSS的波动会导致相当不准确的距离估计,因此需要对测量值应用卡尔曼滤波器来减少这些波动。实验结果表明,增加参考节点数量(用于多边定位计算)可以提高精度,但最多只能增加6个节点。当参考节点数超过6个(即7个和8个节点)时,估计误差会增大。这与增加节点数量会提高定位精度的理论观点不同。达到的平均精度约为0.6 m。
文献[68]提出了一种高尺度3D室内定位系统,通过将IMU相对运动数据与相机测量集成到具有已知绝对位置的固定LED地标,使用EKF进行实时3D姿态估计(位置和方向)。
实验结果表明,通过在每帧摄像机中平均观测一个LED,该技术能够以小于0.4 m的精度自信地预测传感器对的全局3D位置。其他一些利用卡尔曼滤波的现有工作已经在前面讨论过(见第2.1.2,2.2.1和2.2.4节)。
粒子滤波器
贝叶斯滤波器的另一种重要类型是基于数值积分的积分估计。这些被称为粒子滤波器(PFs)[69]的方法在位置跟踪应用中越来越受欢迎。
Particle Filtering’s underlying idea is the representation of the state Probability Density Function (PDF) by a predefined number of hypotheses; hence, it does not implement an analytical function.
粒子滤波的基本思想是通过预定义的假设数量来表示状态概率密度函数(PDF);因此,它没有实现分析功能。
In comparison to KFs, PFs often have a substantially higher complexity depending on the amount of particles that must be created to model the PDF. Furthermore, PFs are subject to inconsistent behaviour, due to phenomena such as sample degeneracy or sample impoverishment.
与KFs相比,PFs通常具有更高的复杂性,这取决于为PDF建模必须创建的粒子数量。此外,由于样本退化或样本贫化等现象,PFs的行为不一致。
最近,PFs被用于一些3D定位的工作中。例如,文献[42]概述了一个以智能手机为目标的定位系统,它使用了许多传感器,如加速计、陀螺仪和气压计,以及PDR、WiFi定位和PF(能够在三维空间工作)等技术。该研究旨在解决3个主要问题:多层建筑物室内实时定位、与楼层过渡相关的3D粒子滤波(PF)重采样以及从粒子云中确定最终位置。测试结果表明,对于所有最终的位置估计器,3D算法的精度都较高。二维PF的平均误差约为1.7 m,而三维PF的平均误差约为1.4 m。3D粒子滤波器的最大优势是粒子在穿越关卡时保持它们的XY位置和方向。在该算法的2D版本中,地板改变后重新生成粒子。在这种情况下,全局航向需要再次稳定,即使在前一层大多数粒子的航向是稳定的。
The authors of [70] use a PF with three states (XYZ) to estimate the 3D position of a moving node. Due to the fact that no movement information is available, the PF uses a measurement model to produce some random particle motion once every second. [70]的作者使用具有三种状态(XYZ)的PF来估计移动节点的3D位置。由于没有可用的运动信息,PF使用测量模型每秒产生一些随机的粒子运动。
When a range measurement to a beacon is obtained, the distance between all particles and that beacon is estimated. The moving object’s location is determined by computing the weighted mean position of all particles.
当测量到一个信标的距离时,估计出所有粒子与该信标之间的距离。通过计算所有粒子的加权平均位置来确定运动目标的位置。
The experiments were conducted with the help of Bespoon (https://bespoon.xyz, accessed on 26 November 2022) and Decawave (https://www.decawave.com, accessed on 26 November 2022) equipment [71], reaching mean positioning accuracies in NLOS conditions of 0.51 m and 0.24 m, respectively.
实验在Bespoon (https://bespoon.xyz,2022年11月26日访问)和Decawave (https://www.decawave.com, 2022年11月26日访问)的帮助下进行。设备[71],在NLOS条件下的平均定位精度分别为0.51 m和0.24 m。
2.3.2. Cooperative Positioning
3.3D室内定位的机器学习
对于室内定位的广泛部署,精度、可靠性、可扩展性和环境适应性仍然是主要的挑战,特别是在不断变化的室内环境中不可预测的无线电传播特性以及接入技术的限制。与室外环境相比,室内环境极其复杂,具有各种形状和大小,并且存在或不存在静止和移动的物体(例如,家具和人)。这些变量极大地改变了LOS和NLOS无线电信号的传播,导致不可预测的衰减、散射、阴影和盲点,大大降低了室内定位精度。为了解决这些问题,人工智能(AI)和机器学习(ML)技术最近得到了广泛的研究,并取得了一定的成功[84]。使用AI/ML技术的根本好处是它们能够根据观察到的数据做出有效的决策,而不需要精确的数学公式。此外,机器学习也被证明是融合从各种位置传感器、技术和技术获得的多维数据的有用工具。由于近年来机器学习的快速发展,文献中存在几种基于计算机视觉的定位系统,如[85,86];然而,这些论文的重点是二维定位。这些论文将成为进一步研究和3D扩展的重要基准。也可以考虑三维点云分类,例如[87]。
一项利用ML的工作已经在之前的论文中提到过(见第2.2.2节)。另一项工作是[88]研究人员设计了一种小型化的室内定位装置,同时考虑了几种机器学习优化算法,采用Levenberg-Marquardt和ToA定位算法的混合方法实现空间三维定位。该系统和机器学习的目的是在基站之间没有高差的情况下精确定位目标高度的能力。
与传统的RMSE为2.7 m的ToA和TDoA方法相比,混合方法能够获得19.19 cm的RMSE更精确的结果,且效率没有明显下降。造成RMSE测量差异的原因实际上是在z轴上测量的误差,使用传统方法的误差为271.85 cm,使用机器学习混合方法的误差为12.20 cm,这证明了该算法的贡献。
[89]的作者提出了一种用于医院建筑内导航的3D定位方法。该系统是专门为多层建筑设计的。它的目的是获得特定位置的建筑高度、经度和纬度。该系统既能识别平面空间的水平信息,又能识别不同楼层的垂直信息。为了估计移动电台的位置,它采用深度学习算法来分析从蜂窝网络和Wi-Fi接入点接收的信号强度。为了在多层建筑中确定精确的位置信息(建筑高度、经纬度),开发了一种两阶段的深度学习过程(级别分类和位置确定)。在层次分类的第一阶段,训练了一个深度学习神经网络。三个深度学习神经网络被训练以获得三个不同建筑水平的不同位置坐标(经度和纬度)。不同楼层定位的平均距离误差为0.28 m。
4. 三维定位技术
由于每个室内环境的独特性,以及各种技术(如超宽带、毫米波)的不成熟和成本,目前还没有建立室内定位系统的标准。在实践中,每个装置都适应空间尺寸、结构材料、精度规格和预算限制。因此,目前正在使用几种不同的无线定位技术和算法,并且文献中已经报道了几种,这些技术和算法利用无线接入技术(rat),如Wi-Fi,蓝牙,超宽带(UWB),毫米波,蜂窝(2G-6G)等。这些技术的重要性在于它们与现代智能设备的集成。在现代系统中应用的其他非无线电技术有超声波、惯性传感器和可见光通信(VLC)。在表6这一部分的最后,我们总结了所有的3D定位技术,描述了它们的优缺点,以及在文献中发现的精度。表7从接收范围、可用性、能效、成本和可扩展性等方面对这些技术进行了比较。
4.1. Wi-Fi
如今,智能手机已经成为日常社会中最常见的技术之一,它们大多在室内使用。参考文献[40]指出:“80%的智能手机使用发生在建筑物内。”大多数现代智能设备都支持WiFi,这使得WiFi成为室内定位的一个很好的选择,也是文献中研究最彻底的定位技术之一。由于现有的Wi-Fi接入点也可以用作信号采集参考点,因此无需额外的基础设施就可以创建适度的定位系统(具有合理的定位精度)[2]。由于移动网络运营商大量部署Wi-Fi接入点,Wi-Fi定位系统在商业化室内定位方面处于领先地位。不幸的是,wps主要依赖于已知环境中Wi-Fi接入点(ap)的密度和分布,这直接影响系统的准确性和可用性。不幸的是,WPS的准确性和可用性由于依赖于其独特的室内服务区域内Wi-Fi ap的数量和分布而降低。尽管无监督和有监督的Wi-Fi AP已被用于改进位置数据库(DB),如指纹数据库或AP位置数据库,以提高定位性能,但考虑环境因素对提高Wi-Fi死区定位效率的影响很小或没有影响。虽然安装额外的ap将提高系统性能,但移动网络运营商通常不愿意,因为它们使系统的时间效率降低,成本更高[74]。如前所述,Wi-Fi也是用于诸如RSS、CSI和FTM等指纹识别方法的技术(参见第2.2.1、2.2.2和2.2.4节)。Ref.[74]提出并实现了一种基于松散连接的Wi-Fi/Sensor集成的高度可扩展的3D室内定位系统。利用动态测量数据导出的位置数据库来估计Wi-Fi的位置。利用PDR作为时间更新模型来弥补行人运动建模的局限性。测试结果表明,通过使用基本但互补的松耦合卡尔曼滤波,可以在缩放的室内环境中提供稳定而准确的三维室内位置。
[36]中的研究人员提出了一种适用于室内物联网应用的鲁棒3D室内定位系统。该系统基于贝叶斯网络,通过确定Wi-Fi信号的强度来运行。仅使用4个ap和少量rp,建议的3D贝叶斯图形模型(3D- bgm)获得了2.9米的总体定位精度。
WiFi往返时间(RTT)在[90]中被用于智能手机的3D室内定位算法。该算法采用加权质心算法(weighted centroid, WC)估计粗糙二维位置,实现简单,复杂度低。根据行人活动情况获取粗目标高度。然后,将粗糙高度和二维位置组合成一个粗糙的三维位置,作为标准粒子群优化算法的初始位置。SPSO算法的目的是在智能手机粗略的3D位置的基础上估计出更准确的3D位置。为了减少计算量,采用基于密度的带噪声应用空间聚类(DBSCAN)算法辅助SPSO粒子的更新。实验结果表明,该定位算法三维精度优于WC和最小二乘(LS)算法,二维精度为1.147 m,高程精度为0.305 m。
文献[91]提出了一种基于智能手机的室内三维定位方法,该方法考虑了来自WiFi接口和气压计传感器的信息。在两种实际情况下进行了几次实验,并在商用移动设备上进行了测量。在两种不同的环境中进行测试时,发现该方法即使在可用接入点很少的情况下也能获得较低的定位误差:当使用超过五个接入点(ap)时,所提出的3D定位系统能够准确定位用户,误差分别小于2 m和1.2 m
4.2. Bluetooth
5.讨论和结论
本文对室内三维定位的研究现状进行了综述和讨论。本综述包括不同的技术/方法和技术,可以使用和/或组合在一起,以实现现代智能应用的高3D精度要求,同时保持成本效益。
表1展示了用于室内3D定位的各种技术,指出了它们的潜在优点和缺点。例如,Wi-Fi,一种通过采用指纹方法(RSS, CSI或ftm为基础)以及各种几何方法而广泛使用的技术,被认为是一种相当容易以相对较低的成本设置的技术;然而,与UWB和毫米波等技术相比,它在NLOS条件下的精度较差。同样,由于简单和便宜,蓝牙与Wi-Fi类似;然而,它容易受到无线电干扰;因此,它通常与定位精度低有关。VLC和超声波,尽管与其他技术相比,它们表现出相对较好的精度,但它们都是极短距离的,只适用于视线范围内的情况。此外,可听声音在各种类型的环境中得到广泛的支持,并且能够达到亚米级的精度,但由于其产生的干扰噪声,无法在常见的定位场景中使用。最后,与其他技术相比,UWB和毫米波技术展示了最有希望的结果,即使在多径场景下也能达到厘米级精度,并且对干扰相对不敏感。然而,它们的主要缺点是目前缺乏支持设备(主要是毫米波),这使得它们成为相对昂贵或不可行的选择。然而,全球技术发展趋势表明,这种情况可能在不久的将来发生变化。在方法方面,利用角度信息(AoA)或时间信息(ToA, TDoA)的几何方法,其工作原理是利用接收机从分散的发射机集合中收集的信号,构成了估计三维位置的基本和相对准确的方法。定位精度显然依赖于测量距离或角度的精度,而这种精度似乎与所使用的基础技术密切相关。例如,UWB和毫米波技术在估计距离(基于定时测量)方面具有很高的精度,而在这些现代系统中引入相控阵有助于准确估计角度信息。分散节点的数量在三维定位估计中也起着重要的作用。变送器数量越多,精度越高;然而,在实施此类系统时,这会带来额外的财务、实施和管理成本,特别是在更复杂和拥挤的地区,以及考虑到物体或人员不断移动的场景。然而,物联网的快速发展和许多移动节点的可用性促进了3D定位过程,特别是通过使用传感器融合、滤波甚至协同定位策略。协作定位似乎是一个很有前途的解决方案,因为空间中的设备是相互连接的,可以确定彼此的相对位置。指纹识别也构成了3D定位的候选方法,通常与其他方法或技术(例如气压计)相补充或结合,以计算z尺寸或提高精度(通过使用过滤)。问题是,数据收集过程通常非常费力,当环境中出现动态时,无论是当人们四处走动,还是当环境本身发生几何或形态变化时,甚至当用户使用不同的设备并以各种不同的方式持有它们时,都会出现额外的挑战。文献报道,基于磁场的定位可能不那么费力;然而,它只适用于特定类型的室内环境。


















 947
947

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









