







 文章介绍了光栅的基本概念,包括物理光栅和计量光栅的分类,以及透射式直线光栅的工作原理。重点讲述了莫尔条纹的形成和放大特性,以及如何利用莫尔条纹放大小位移。此外,文章详细阐述了利用脉冲信号测量速度的三种方法——M法、T法和M/T法,讨论了它们的精度和适用范围。
文章介绍了光栅的基本概念,包括物理光栅和计量光栅的分类,以及透射式直线光栅的工作原理。重点讲述了莫尔条纹的形成和放大特性,以及如何利用莫尔条纹放大小位移。此外,文章详细阐述了利用脉冲信号测量速度的三种方法——M法、T法和M/T法,讨论了它们的精度和适用范围。
本节介绍光栅的基本知识,介绍利用莫尔条纹放大小位移
本节讲解利用脉冲信号测速的三种方法
光栅
定义:
光栅是由许多等距的透光狭缝或不透光刻线均匀、相间排列而成的光电器件
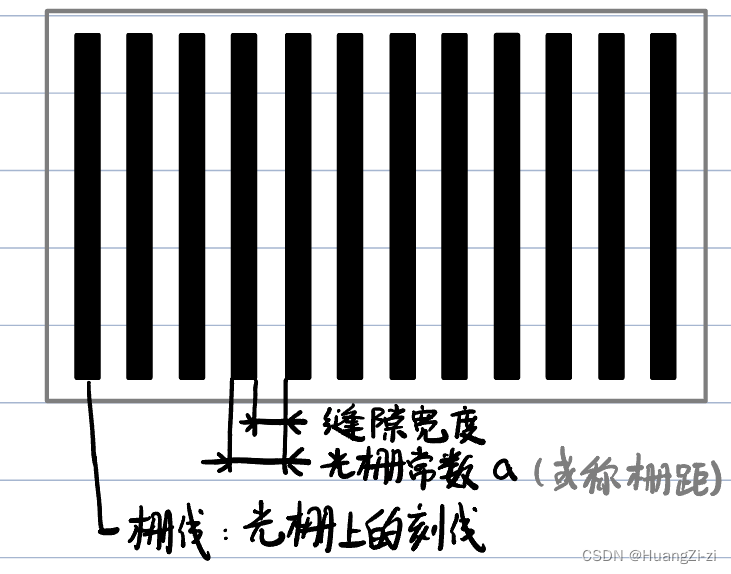
分类:
按用途分:
- 物理光栅:利用光的衍射现象,用于光谱分析、光波长测量
- 计量光栅:利用莫尔条纹现象,用于长度、角度、速度、加速度、振动等物理量的测量。用于长度测量的称为长光栅,用于角度测量的叫圆光栅
按光的走向分:
- 透射式光栅:圆光栅只有透射式
- 反射式光栅
透射式直线光栅
透射式直线光栅由光源、长光栅、短光栅、光电元件组成。长光栅随活动部件而运动,短光栅固定,两光栅刻线密度相同
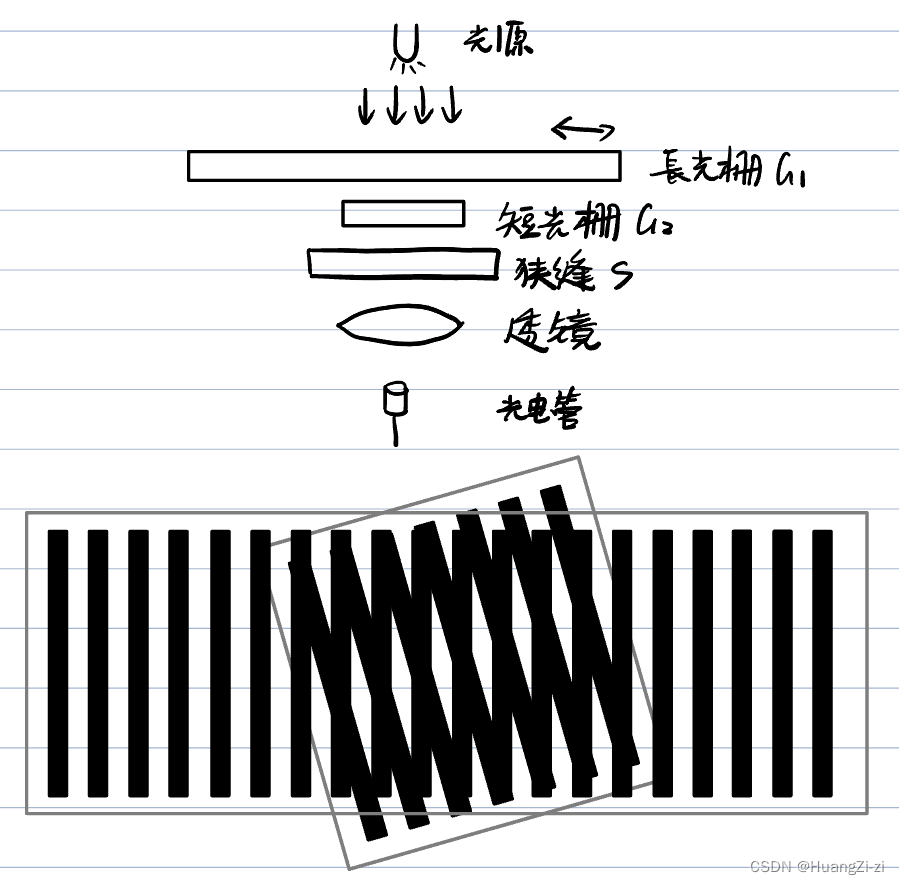
莫尔条纹
两个光栅交叠处出现明暗相间的条纹。这种光学图案称为莫尔条纹。
两光栅的透光部分相叠加,形成莫尔条纹的亮带。透光部分与不透光部分叠加,形成其暗带。
当
θ
\theta
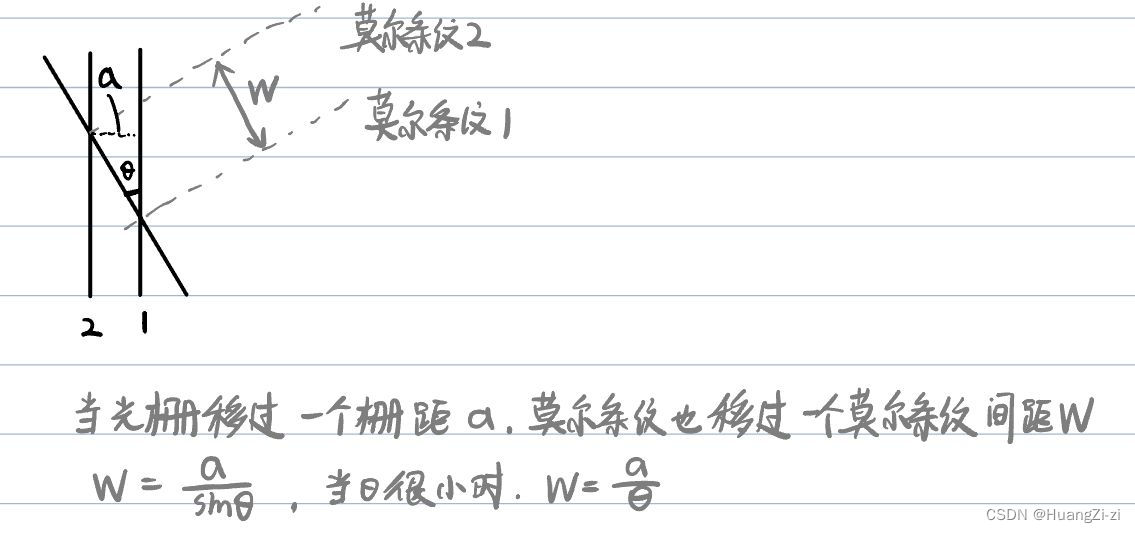
θ很小时,莫尔条纹近似与光栅垂直。光栅左右移动,莫尔条纹上下移动,左右移动的距离
a
a
a被放大成上下移动的距离
W
=
a
θ
\displaystyle W=\frac{a}{\theta}
W=θa
光栅任一点处莫尔条纹的亮度是位移的周期函数,周期为栅距a
利用光敏元件检测莫尔条纹,计算出信号变化N个周期,则可以计算出位移
x
=
N
a
x=Na
x=Na
得益于莫尔条纹的位移放大作用,可以大大减轻光学系统和电子线路的负担(精度要求更低)
若要判断位移的方向,则需要增加狭缝(2条)、装配两个光敏元件。狭缝中心相距W/4,使其信号相位差为90度,根据信号的超前滞后关系,可以判断移动的方向
「这一点原理与增量式码盘是一样的」
总结莫尔条纹:
- 方向:垂直于两光栅角平分线。当夹角很小,可以认为其垂直于光栅
- 同步性:光栅移动一个栅距,莫尔条纹移动一个间距,且方向也呈对应关系
- 放大性:当夹角 θ \theta θ很小时, W > > a W>>a W>>a,起到光学放大作用,提高灵敏度
- 可调性:夹角 θ \theta θ可灵活调整
- 准确性:莫尔条纹的形成来源于大量条纹的叠加,误差平均效应可以克服局部误差,提高精度
由脉冲信号求转速
数字式角位移传感器(如增量码盘等)输出方波脉冲信号,脉冲个数与角位移成正比。由此类脉冲信号求速度有如下的几个方法:
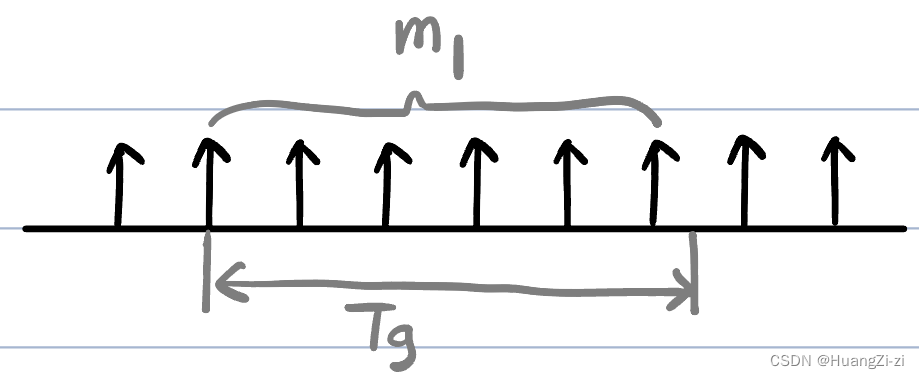
M法测速
也称定时测角法。在规定的检测时间内对传感器脉冲进行计数,进而计算角度,算出速度。猜测M是指movement,即时间一定,测量移动。
设每转产生脉冲数为P,检测时间段为
T
g
T_g
Tg,在检测时间段内测得的脉冲数为
m
1
m_1
m1,则转速
n
=
60
m
1
P
T
g
(
r
/
min
)
n=60\displaystyle \frac{m_1}{PT_g}\ (r/\min)
n=60PTgm1 (r/min)
由于
T
g
T_g
Tg和脉冲不能保证严格同步,可能产生1个脉冲的测量误差。「注:可以控制Tg开始时与脉冲对齐,但不能控制其结束是是否对齐」
为了提高测量精度
T
g
T_g
Tg要足够长,保证
m
1
m_1
m1较大,可以忽略1个脉冲的误差。但由于计数器容量存在上限,转速高时容易计满,量程受到限制。而减小时间
T
g
T_g
Tg又会影响测量精度。
定义分辨率Q为脉冲数增加1时,转速的变化量:
Q
=
60
(
m
1
+
1
)
P
T
g
−
60
m
1
P
T
g
=
60
P
T
g
(
r
/
min
)
Q= \displaystyle \frac{60(m_1+1)}{PT_g}-\frac{60m_1}{PT_g}=\frac{60}{PT_g}\ (r/\min)
Q=PTg60(m1+1)−PTg60m1=PTg60 (r/min)
定义误差
Δ
n
=
Q
\Delta n=Q
Δn=Q,则可知,误差与转速n无关。但相对误差
Δ
n
/
n
\Delta n/n
Δn/n与转速成反比,高速时相对误差小。因此适用于中高速场合。
T法测速
也称定角测时法。根据两次相邻脉冲间隔的时间来确定转速。猜测T是指time,即位移一定,测量时间。
设每转产生脉冲数为P,那么相邻两次脉冲对应转过
1
/
P
1/P
1/P转。时钟脉冲频率为
f
c
f_c
fc,由传感器脉冲控制计数的起始和终止,在相邻两次脉冲之间计数为
m
2
m_2
m2个,对应时间为
T
=
m
2
/
f
c
T=m_2/f_c
T=m2/fc,计算出转速:
n
=
60
f
c
m
2
P
(
r
/
min
)
n= \displaystyle 60\frac{f_c}{m_2P}\ (r/\min)
n=60m2Pfc (r/min)
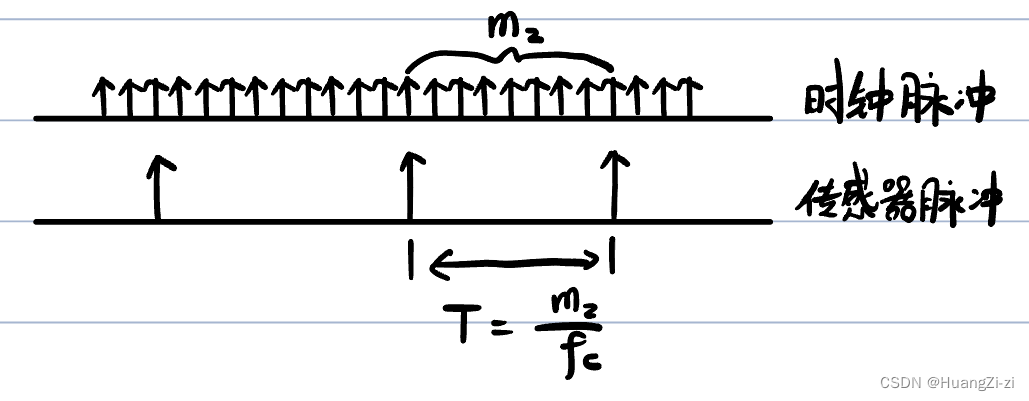
T法测速的误差主要来源于:(1)时钟脉冲和传感器脉冲没有对齐,跳变的出发时间不一致。(2)计数器的启动和停止与传感器信号跳变不一致
因此要求脉冲的跳变陡峭、且与计数器严格同步
按照之前定义的分辨率:
Q
=
60
f
c
m
2
P
−
60
f
c
(
m
2
+
1
)
P
=
60
f
c
m
2
(
m
2
+
1
)
P
=
n
2
P
60
f
c
+
n
P
(
r
/
min
)
,
其中
n
=
60
f
c
m
2
P
Q=\displaystyle \frac{60f_c}{m_2P}-\frac{60f_c}{(m_2+1)P}=\frac{60f_c}{m_2(m_2+1)P}=\frac{n^2P}{60f_c+nP}\ (r/\min),其中n=\frac{60f_c}{m_2P}
Q=m2P60fc−(m2+1)P60fc=m2(m2+1)P60fc=60fc+nPn2P (r/min),其中n=m2P60fc
可知,n越小,Q越小,分辨率越高。
该方法在低速时分辨率和精度较高。随转速提高,精度变差,有小于一个脉冲的误差存在。因此适用于中低速场合
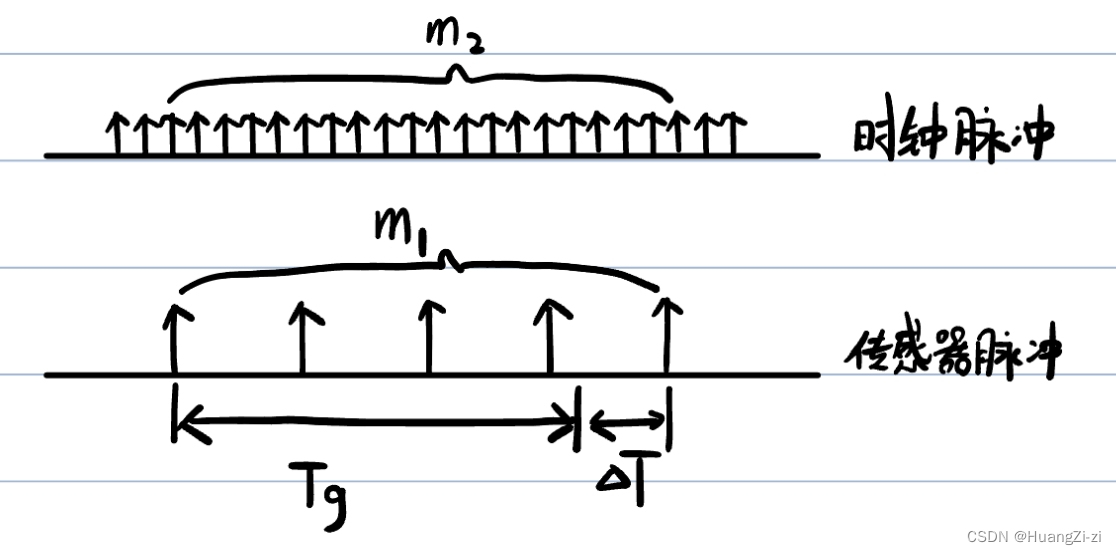
M/T法测速
又称测频测周法,结合了M法和T法的优点,精度介于两者之间。
M/T法分别对时钟脉冲、传感器脉冲、预设检测时间进行计数和定时
T
g
T_g
Tg为预设的检测时间,传感器某一次脉冲启动
T
g
T_g
Tg的定时,同时启动两个脉冲的计数器。在
T
g
T_g
Tg定时结束后,等到下一个脉冲时再停止时钟脉冲的计数,时钟脉冲计数为
m
2
m_2
m2,则实际检测时间
T
=
m
2
/
f
c
T=m_2/f_c
T=m2/fc。传感器脉冲计数为
m
1
m_1
m1,因此转速:
n
=
60
m
1
P
T
=
60
f
c
m
1
P
m
2
(
r
/
min
)
n=\displaystyle \frac{60m_1}{PT}=\frac{60f_cm_1}{Pm_2}\ (r/\min)
n=PT60m1=Pm260fcm1 (r/min)
m
1
m_1
m1不存在误差,
m
2
m_2
m2可能有±1个脉冲的误差
分辨率
Q
=
60
f
c
m
1
P
m
2
−
60
f
c
m
1
P
(
m
2
+
1
)
=
n
m
2
+
1
(
r
/
min
)
,
其中
n
=
60
f
c
m
1
P
m
2
Q=\displaystyle \frac{60f_cm_1}{Pm_2}-\frac{60f_cm_1}{P(m_2+1)}=\frac{n}{m_2+1}\ (r/\min),其中n=\frac{60f_cm_1}{Pm_2}
Q=Pm260fcm1−P(m2+1)60fcm1=m2+1n (r/min),其中n=Pm260fcm1
定义误差
Δ
n
=
Q
\Delta n=Q
Δn=Q,则误差与n有关,转速越高,误差越大。
相对误差
Δ
n
/
n
\Delta n/n
Δn/n与n无关
当转速较低时,在检测时间内只有一个脉冲,即
m
1
=
1
m_1=1
m1=1,此时相当于T法测速,速度越低,相对误差越小
当速度较高(
m
1
大于
m
2
,转速大于
60
P
T
g
m_1大于m_2,转速大于60PT_g
m1大于m2,转速大于60PTg),可以近似为M法测速,转速越高,相对误差越小
M/T法设定了一个最小的检测时间,保证了高速时的相对精度。同时限定了至少一个传感器脉冲个数,保证了低速时的相对精度,综合M法和T法的优点,应用更加广泛。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









