







本文提出了一种面向智能体的规划框架,旨在通过多智能体系统有效分解用户查询并分配子任务,从而提高在复杂现实问题上的解决能力,确保解答的可解性、完整性和非冗余性。
1 面向智能体的规划
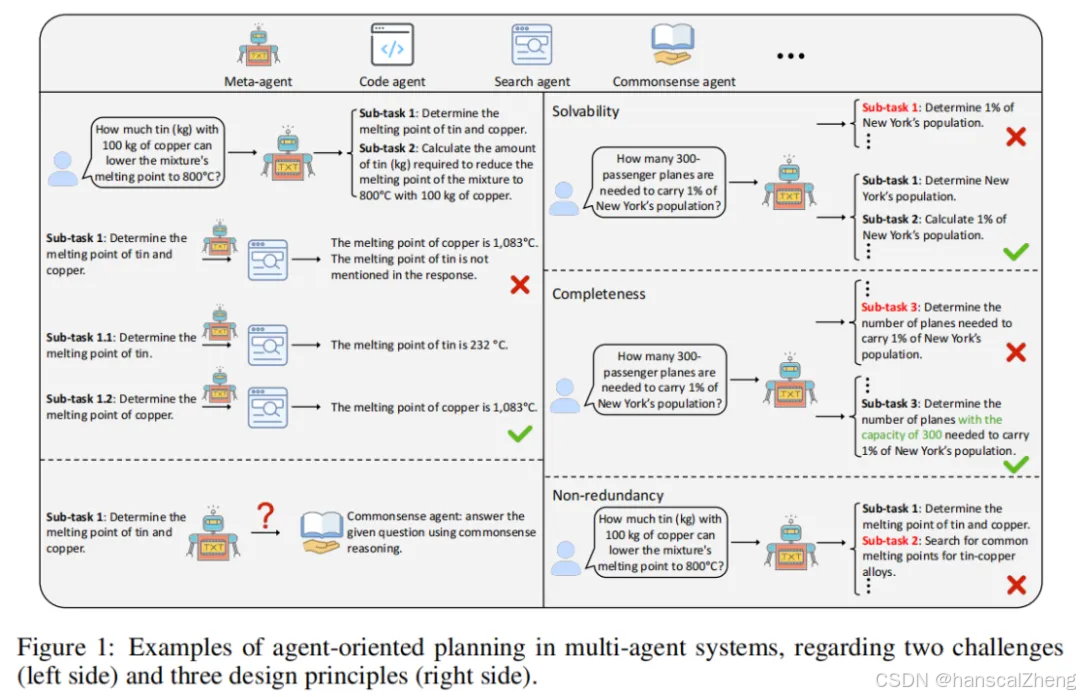
智能体框架的设计原则
·可解性 (Solvability):确保每个子任务可以由至少一个智能体独立解决,从而保证输出的可靠性。
·完整性 (Completeness):确保所有必要的信息都被纳入到子任务中,以便最终能生成一个全面的答案。
·非冗余性 (Non-redundancy):确保子任务之间没有重复的信息和要求,以优化资源的使用
任务分解与分配
·快速分解与分配:元智能体首先对用户查询进行快速分解,并为每个子任务分配合适的智能体。这一过程不仅提高了任务的执行效率,还确保了任务的有效性。
子任务的评估
·奖励模型:文章提出了一种奖励模型,用于在不实际调用智能体的情况下,评估子任务的可解性和智能体的响应质量。通过这种方式,元智能体能够根据评估结果决定是否执行子任务或进行重新规划。
反馈机制
·持续改进:系统内集成了反馈循环,能够根据执行结果和智能体的表现不断优化任务分解和分配的策略。这一机制确保了智能体系统的灵活性和适应性。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









