






面临的问题
和梯度下降法一样,牛顿法寻找的也是导数为0的点,这不一定是极值点,因此会面临局部极小值和鞍点问题,这在之前的文章中已经介绍过了,这里不再重复。
牛顿法面临的另外一个问题是Hessian矩阵可能不可逆,从而导致这种方法失效。此外,求解Hessian矩阵的逆矩阵或者求解线性方程组计算量大,需要耗费大量的时间。为此,提出了拟牛顿法这种改进方案,在后面会介绍。
除此之外,牛顿法在每次迭代时序列xi可能不会收敛到一个最优解,它甚至不能保证函数值会按照这个序列递减。解决第一个问题可以通过调整牛顿方向的步长来实现,目前常用的方法有两种:直线搜索和可信区域法。可信域牛顿法在后面也会介绍。
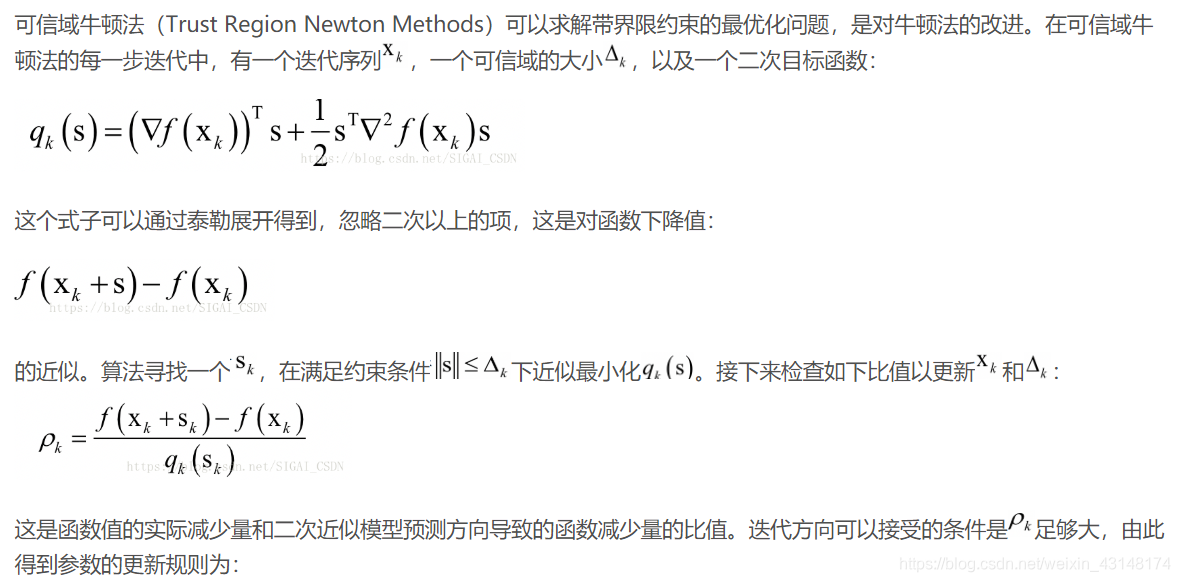
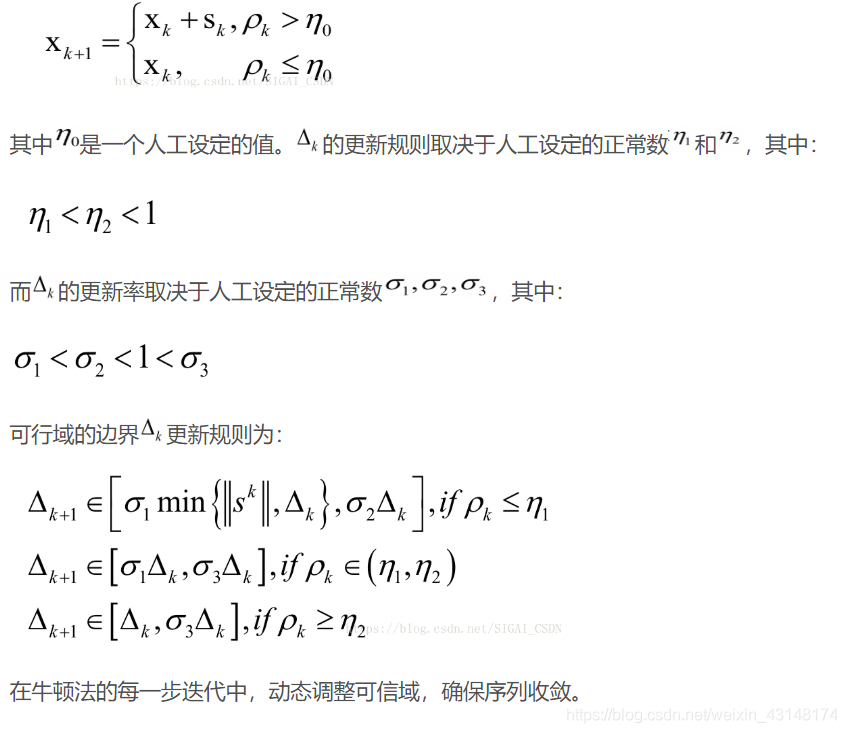
可信域牛顿法
拟牛顿法
牛顿法在每次迭代时需要计算出Hessian矩阵,然后求解一个以该矩阵为系数矩阵的线性方程组,这非常耗时,另外Hessian矩阵可能不可逆。为此提出了一些改进的方法,典型的代表是拟牛顿法(Quasi-Newton)。
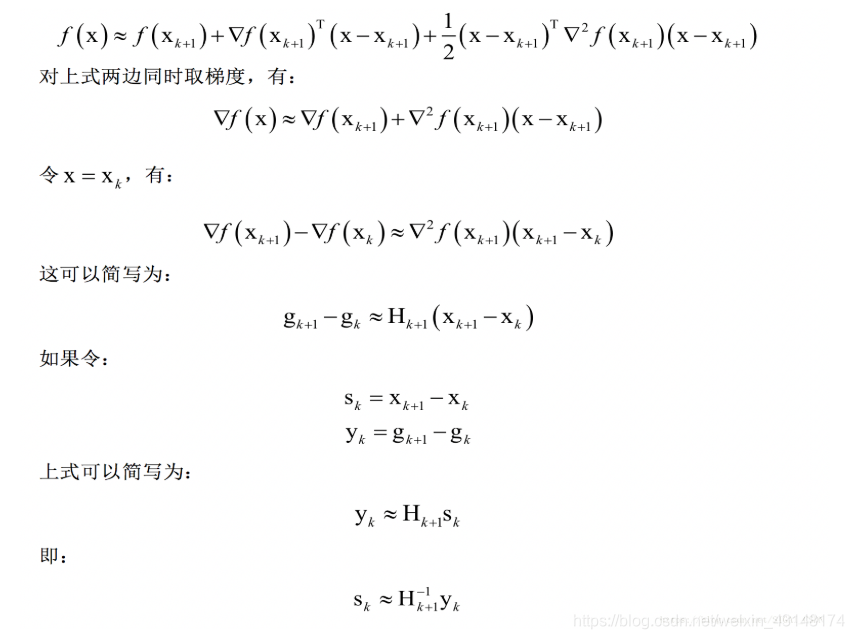
拟牛顿法的思想是不计算目标函数的Hessian矩阵然后求逆矩阵,而是通过其他手段得到Hessian矩阵或其逆矩阵的近似矩阵。具体做法是构造一个近似Hessian矩阵或其逆矩阵的正定对称矩阵,用该矩阵进行牛顿法的迭代。将函数在点处进行泰勒展开,忽略二次以上的项,有:
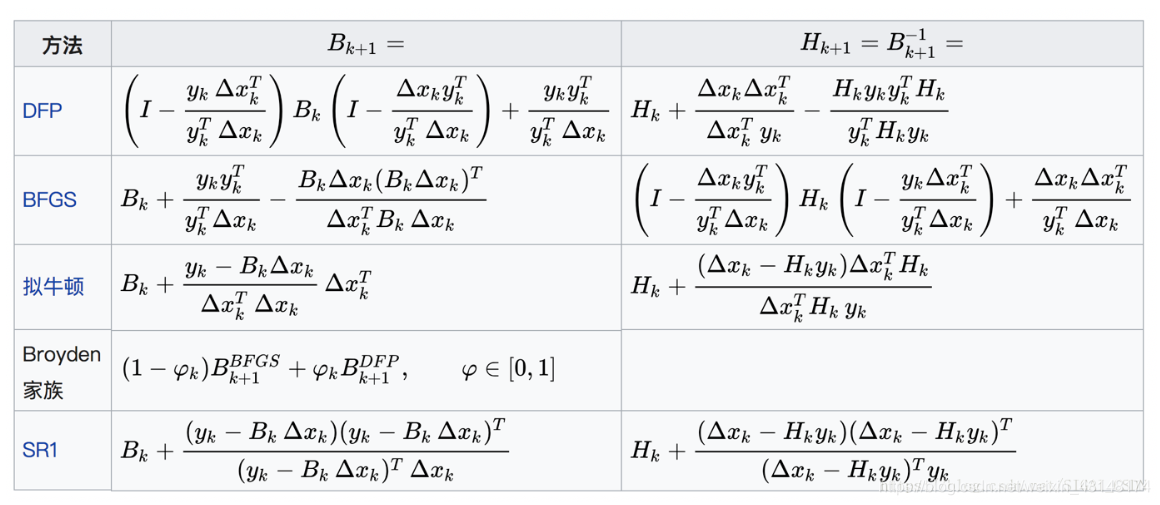
这个条件称为拟牛顿条件,用来近似代替Hessian矩阵的矩阵需要满足此条件。根据此条件,构造出了多种拟牛顿法,典型的有DFP算法、BFGS算法、L-BFGS算法等,在这里我们重点介绍BFGS算法。下图列出了常用的拟牛顿法的迭代公式(图片来自维基百科):
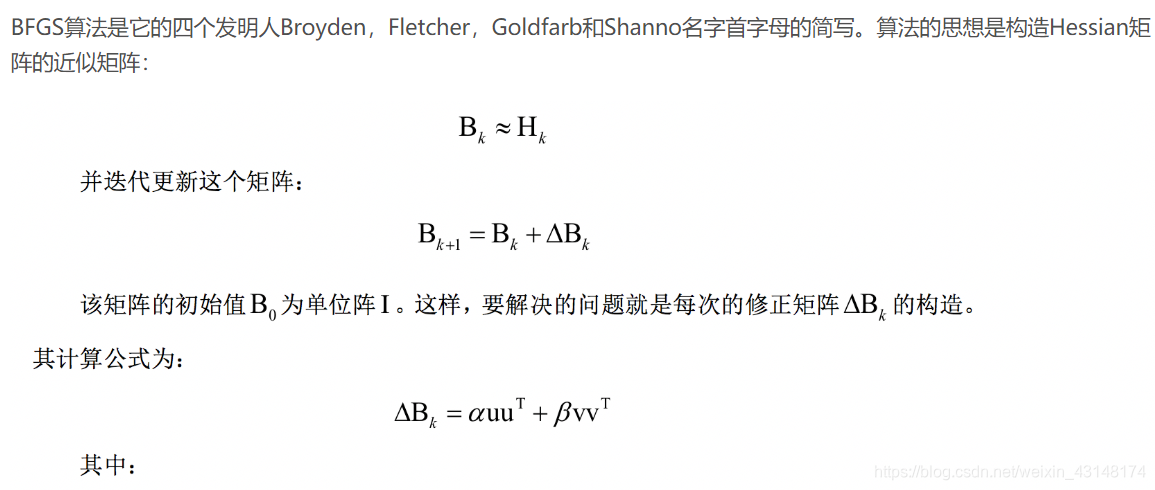
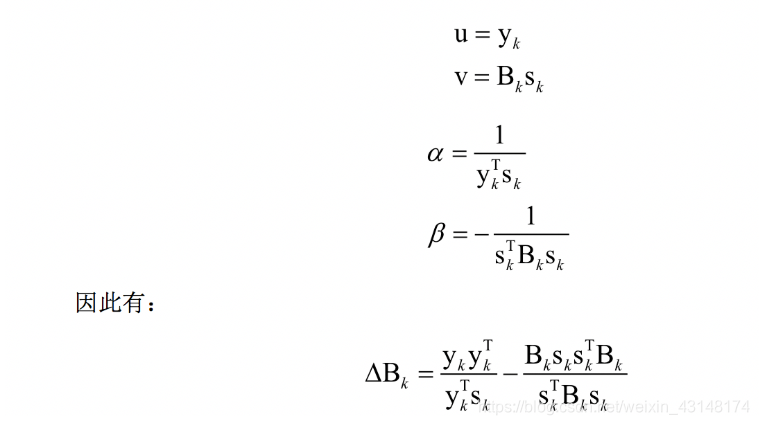
BFGS算法是它的四个发明人Broyden,Fletcher,Goldfarb和Shanno名字首字母的简写。算法的思想是构造Hessian矩阵的近似矩阵:
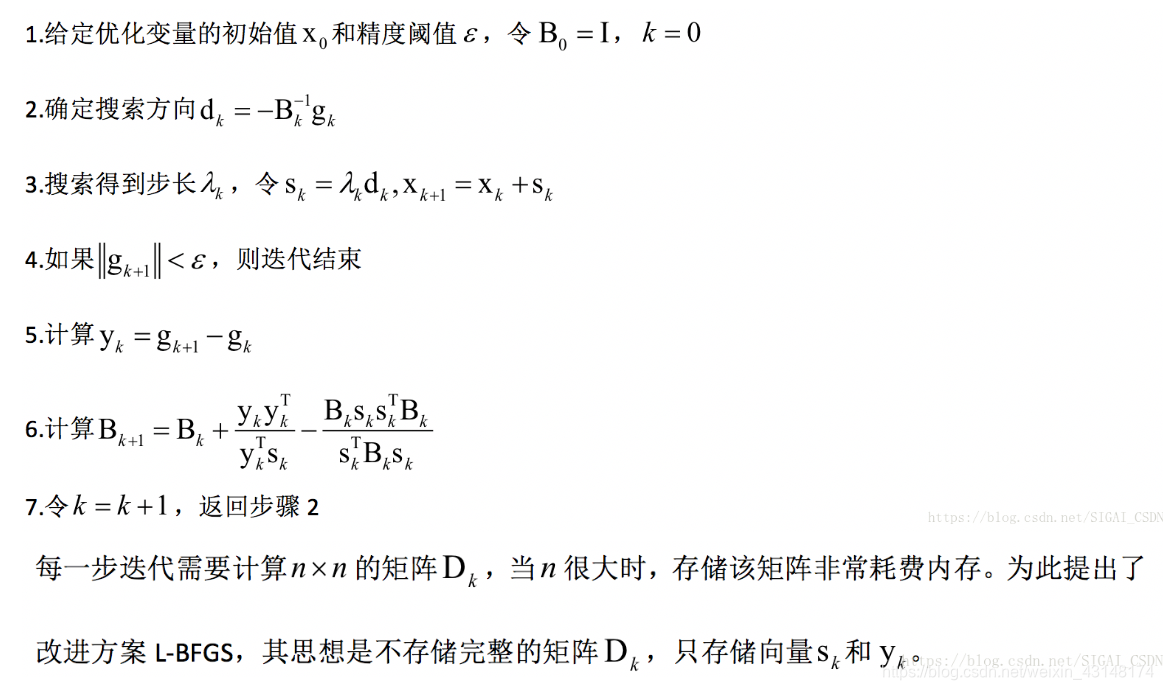
算法的完整流程为:
实际应用
下面介绍牛顿法在机器学习中的实际应用。在这里我们以线性支持向量机和liblinear为例。liblinear是一个线性算法的开源库,其作者是台湾大学林智仁教授和他的学生,与libsvm的作者相同。这个库支持logistic回归和线性支持向量机两类算法,包括各种损失函数和正则化的版本。L1正则化L2损失函数线性支持向量机训练时求解如下最优化问题:
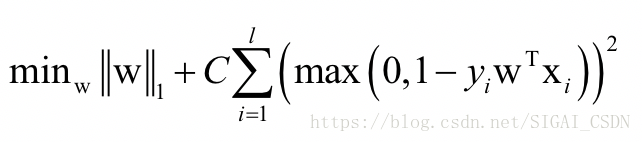
目标函数的前半部分其中为L1范数的正则化项,后半部分括号里为合页损失函数。在liblinear中,求解上述问题采用了坐标下降法,这是一种分治法,每次挑选出一部分变量进行优化,将其他变量固定住不动。如果只挑选出一个变量进行优化,要求解的子问题为:
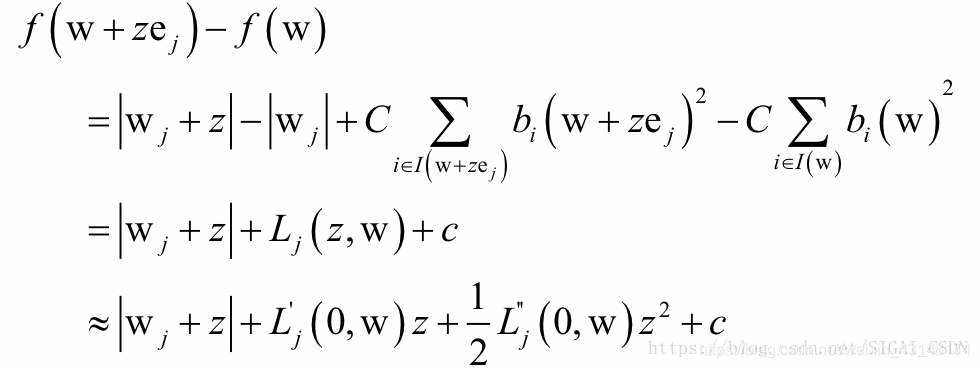
其中向量的第个分量为1,其他分量全为0。上式中最后一步对函数用二阶泰勒展开近似代替。上面子问题的求解采用牛顿法。求解整个问题的坐标下降法流程为(这里只列出了和牛顿法相关的步骤):
设置各个参数的初始值
如果w还不是最优值,则循环
循环,对j = 1, 2, ..., n
求解如下问题得到牛顿方向d:
更新参数值:
结束循环
结束循环
下面来看源代码实现。函数solve_l1r_l2_svc实现求解L1正则化L2损失函数支持向量机原问题的坐标下降法。在这里我们重点看牛顿方向的计算,直线搜索,参数更新这三步,其他的可以忽略掉。代码如下:
static void solve_l1r_l2_svc(problem *prob_col, double *w, double eps, double Cp,
double Cn)
{
int l = prob_col->l;
int w_size = prob_col->n;
int j, s, iter = 0;
int max_iter = 1000;
int active_size = w_size;
int max_num_linesearch = 20;
double sigma = 0.01;
double d, G_loss, G, H;
double Gmax_old = INF;
double Gmax_new, Gnorm1_new;
double Gnorm1_init = -1.0; // Gnorm1_init is initialized at the first iteration
double d_old, d_diff;
double loss_old, loss_new;
double appxcond, cond;
int *index = new int[w_size];
schar *y = new schar[l];
double *b = new double[l]; // b = 1-ywTx
double *xj_sq = new double[w_size];
feature_node *x;
double C[3] = {Cn,0,Cp};
// w赋初值
for(j=0; j<w_size; j++)
w[j] = 0;
for(j=0; j<l; j++)
{
b[j] = 1;
if(prob_col->y[j] > 0)
y[j] = 1;
else
y[j] = -1;
}
for(j=0; j<w_size; j++)
{
index[j] = j;
xj_sq[j] = 0;
x = prob_col->x[j];
while(x->index != -1)
{
int ind = x->index-1;
x->value *= y[ind]; // x->value stores yi*xij
double val = x->value;
b[ind] -= w[j]*val;
xj_sq[j] += C[GETI(ind)]*val*val;
x++;
}
}
// 这是坐标下降法的核心,循环迭代,直到收敛
while(iter < max_iter)
{
Gmax_new = 0;
Gnorm1_new = 0;
// 先对优化变量的下标进行随机洗牌
for(j=0; j<active_size; j++)
{
int i = j+rand()%(active_size-j);
swap(index[i], index[j]);
}
// 依次对每个变量进行优化
for(s=0; s<active_size; s++)
{
j = index[s];
G_loss = 0;
H = 0;
x = prob_col->x[j];
while(x->index != -1)
{
int ind = x->index-1;
if(b[ind] > 0)
{
double val = x->value;
double tmp = C[GETI(ind)]*val;
G_loss -= tmp*b[ind];
H += tmp*val;
}
x++;
}
G_loss *= 2;
G = G_loss;
H *= 2;
H = max(H, 1e-12);
double Gp = G+1;
double Gn = G-1;
double violation = 0;
if(w[j] == 0)
{
if(Gp < 0)
violation = -Gp;
else if(Gn > 0)
violation = Gn;
else if(Gp>Gmax_old/l && Gn<-Gmax_old/l)
{
active_size--;
swap(index[s], index[active_size]);
s--;
continue;
}
}
else if(w[j] > 0)
violation = fabs(Gp);
else
violation = fabs(Gn);
Gmax_new = max(Gmax_new, violation);
Gnorm1_new += violation;
// 确定牛顿方向d
if(Gp < H*w[j])
d = -Gp/H;
else if(Gn > H*w[j])
d = -Gn/H;
else
d = -w[j];
if(fabs(d) < 1.0e-12)
continue;
double delta = fabs(w[j]+d)-fabs(w[j]) + G*d;
d_old = 0;
int num_linesearch;
// 直线搜索过程
for(num_linesearch=0; num_linesearch < max_num_linesearch;
num_linesearch++)
{
d_diff = d_old - d;
cond = fabs(w[j]+d)-fabs(w[j]) - sigma*delta;
appxcond = xj_sq[j]*d*d + G_loss*d + cond;
if(appxcond <= 0)
{
x = prob_col->x[j];
while(x->index != -1)
{
b[x->index-1] += d_diff*x->value;
x++;
}
break;
}
if(num_linesearch == 0)
{
loss_old = 0;
loss_new = 0;
x = prob_col->x[j];
while(x->index != -1)
{
int ind = x->index-1;
if(b[ind] > 0)
loss_old += C[GETI(ind)]*b[ind]*b[ind];
double b_new = b[ind] + d_diff*x->value;
b[ind] = b_new;
if(b_new > 0)
loss_new += C[GETI(ind)]*b_new*b_new;
x++;
}
}
else
{
loss_new = 0;
x = prob_col->x[j];
while(x->index != -1)
{
int ind = x->index-1;
double b_new = b[ind] + d_diff*x->value;
b[ind] = b_new;
if(b_new > 0)
loss_new += C[GETI(ind)]*b_new*b_new;
x++;
}
}
cond = cond + loss_new - loss_old;
if(cond <= 0)
break;
else
{
d_old = d;
d *= 0.5;
delta *= 0.5;
}
}
w[j] += d;
if(num_linesearch >= max_num_linesearch)
{
info("#");
for(int i=0; i<l; i++)
b[i] = 1;
for(int i=0; i<w_size; i++)
{
if(w[i]==0) continue;
x = prob_col->x[i];
while(x->index != -1)
{
b[x->index-1] -= w[i]*x->value;
x++;
}
}
}
}
if(iter == 0)
Gnorm1_init = Gnorm1_new;
iter++;
if(iter % 10 == 0)
info(".");
if(Gnorm1_new <= eps*Gnorm1_init)
{
if(active_size == w_size)
break;
else
{
active_size = w_size;
info("*");
Gmax_old = INF;
continue;
}
}
Gmax_old = Gmax_new;
}
info("\noptimization finished, #iter = %d\n", iter);
if(iter >= max_iter)
info("\nWARNING: reaching max number of iterations\n");
// 计算目标函数值
double v = 0;
int nnz = 0;
for(j=0; j<w_size; j++)
{
x = prob_col->x[j];
while(x->index != -1)
{
x->value *= prob_col->y[x->index-1]; // restore x->value
x++;
}
if(w[j] != 0)
{
v += fabs(w[j]);
nnz++;
}
}
for(j=0; j<l; j++)
if(b[j] > 0)
v += C[GETI(j)]*b[j]*b[j];
info("Objective value = %lf\n", v);
info("#nonzeros/#features = %d/%d\n", nnz, w_size);
delete [] index;
delete [] y;
delete [] b;
delete [] xj_sq;
}
推荐阅读
[1] 机器学习-波澜壮阔40年 SIGAI 2018.4.13.
[2] 学好机器学习需要哪些数学知识?SIGAI 2018.4.17.
[3] 人脸识别算法演化史 SIGAI 2018.4.20.
[4] 基于深度学习的目标检测算法综述 SIGAI 2018.4.24.
[5] 卷积神经网络为什么能够称霸计算机视觉领域? SIGAI 2018.4.26.
[6] 用一张图理解SVM的脉络 SIGAI 2018.4.28.
[7] 人脸检测算法综述 SIGAI 2018.5.3.
[8] 理解神经网络的激活函数 SIGAI 2018.5.5.
[9] 深度卷积神经网络演化历史及结构改进脉络-40页长文全面解读 SIGAI 2018.5.8.
[10] 理解梯度下降法 SIGAI 2018.5.11
[11] 循环神经网络综述—语音识别与自然语言处理的利器 SIGAI 2018.5.15
[12] 理解凸优化 SIGAI 2018.5.18
[13]【实验】理解SVM的核函数和参数 SIGAI 2018.5.22
[14] ] [SIGAI综述] 行人检测算法 SIGAI 2018.5.25

















 863
863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









