






TOF(Time of Flight)技术详解
1. TOF 技术概述
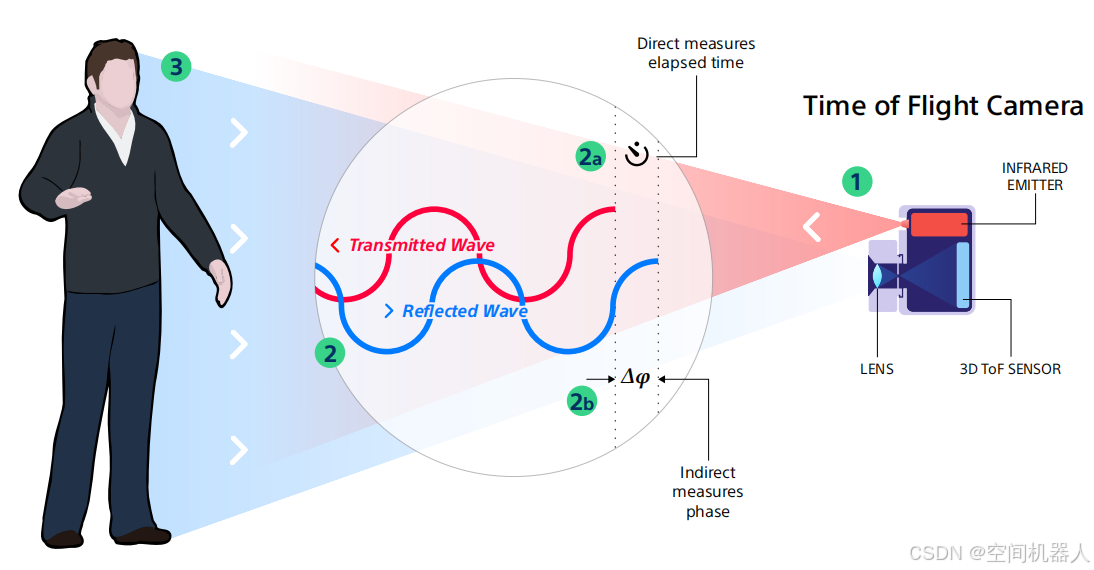
TOF(Time of Flight)技术,即飞行时间技术,是一种通过测量光脉冲从发射到反射再返回传感器的时间来获取目标物体距离的三维成像技术。TOF技术的核心原理是发送光脉冲,然后通过计算光脉冲的飞行时间来测定物体的距离。这与激光扫描的3D传感器类似,但TOF相机能够同时捕获整个场景的深度信息,而激光扫描则是逐点进行。
工作原理:
- 光源发射:TOF相机的光源(通常是激光或LED)发射短脉冲光。
- 光脉冲传播:光脉冲在空间中传播,遇到目标物体后反射回来。
- 反射光接收:传感器接收从物体反射回来的光脉冲。
- 时间计算:通过计算光脉冲的飞行时间,得出物体的距离。
- 图像处理:将距离信息转换为深度图像,显示物体的三维结构。
TOF技术的关键组件包括光源、探测器、光学部件、控制电路和处理电路。与传统的双目立体测量系统不同,TOF技术直接通过光的时间差来计算深度信息,而双目系统通过匹配左右视角的图像并使用三角测量法来确定深度信息。
2. TOF 技术的特点
优点:
- 实时性强:TOF相机能够快速获取整个场景的深度信息,适合需要高实时性的应用。
- 简单的深度获取:不需要复杂的图像匹配算法,直接通过光脉冲时间来测量距离。
缺点:
- 分辨率低:TOF相机的分辨率通常较低,一般不会超过 640x480 像素。这限制了它在需要高分辨率深度图像的应用中的使用。
- 功耗高:由于光脉冲的高频率发射和接收,TOF相机的功耗通常高于其他深度测量技术,如结构光技术。
3. TOF 技术的应用
3.1 工业自动化:
在工业自动化中,TOF技术用于机器人避障和物体检测。例如,在自动化生产线中,TOF相机可以实时检测生产线上是否有障碍物,并通过避免碰撞来提高生产效率和安全性。
例子:
- 自动化仓库:在自动化仓库中,使用TOF相机的机器人可以实时检测到前方的障碍物,及时进行调整,避免碰撞,提高仓库操作的安全性和效率。
3.2 无人驾驶:
TOF相机在无人驾驶汽车中用于实时环境感知。无人驾驶汽车利用TOF技术获取周围环境的深度信息,从而实现障碍物检测和自动避障功能。
例子:
- 无人驾驶汽车避障:无人驾驶汽车使用TOF相机来实时扫描周围环境,检测道路上的行人和障碍物,确保车辆能够安全行驶。
3.3 智能家居:
TOF技术在智能家居中应用广泛。例如,智能门锁可以通过TOF相机检测来访者的身份,并根据检测结果进行自动开锁。
例子:
- 智能门锁:智能门锁通过TOF相机识别来访者的身份,在验证通过后自动解锁,提高了家庭安全性和便利性。
4. TOF 技术的优势与不足
优势:
- 实时深度信息:能够迅速获得场景的深度信息,适合对实时性有高要求的应用。
- 简单操作:深度信息的获取过程简单,不需要复杂的图像处理算法。
不足:
- 分辨率限制:受光源发射点限制,TOF相机的分辨率通常较低,这对某些需要高分辨率的应用场景是不利的。
- 功耗较高:由于频繁发射光脉冲,TOF相机的功耗较高,这可能影响到设备的电池寿命和能效。
5. 未来发展趋势
5.1 分辨率提升:
随着技术进步,未来TOF相机的分辨率将逐步提升。这将使其在更多需要高分辨率深度图像的应用中得到应用。
5.2 功耗优化:
未来的TOF技术将致力于降低功耗,提高能效,使其更适合于便携设备和长时间运行的应用。
5.3 集成化发展:
未来的TOF相机可能会集成更多功能,如与RGB图像传感器集成,提供多模态的环境感知能力,进一步提升应用的灵活性和效果。
例子:
- 高分辨率TOF相机:未来的TOF相机将能够提供更高的分辨率图像,适用于需要精确深度信息的应用场景,如医疗成像和精密测量。
- 低功耗TOF技术:新一代TOF相机将采用低功耗设计,适合于智能手机和可穿戴设备等对电池续航有高要求的设备。
6. 总结
TOF技术作为一种先进的三维成像技术,通过光脉冲的飞行时间来获取物体的深度信息。尽管其分辨率较低、功耗较高,但在实时性和应用便捷性方面具有显著优势。随着技术的发展,TOF技术的分辨率和功耗将不断改进,其应用范围也将进一步拓展。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











