









 本文介绍了3D飞行时间(Time-of-Flight, TOF)技术如何改变机器视觉行业,详细阐述了TOF相机的工作原理,包括脉冲和连续波调制方法,以及点云在深度图和3D渲染中的作用。还探讨了调制频率和环境光对深度测量精度的影响。
本文介绍了3D飞行时间(Time-of-Flight, TOF)技术如何改变机器视觉行业,详细阐述了TOF相机的工作原理,包括脉冲和连续波调制方法,以及点云在深度图和3D渲染中的作用。还探讨了调制频率和环境光对深度测量精度的影响。
Technical White Paper SLOA190B – January 2014 Revised May 2014 by Larry Li, Sensing Solutions
1. 介绍
3D飞行时间(Time-of-Flight TOF)技术正在给机器视觉行业带来革命性变化。通过使用低成本的CMOS像素阵列和主动调制光源从而实现3D成像。
结构紧凑,易于使用,加上高精度和高帧率,使TOF相机具有广泛应用。在本文中,我们介绍TOF操作的基础知识,并将TOF与其他2D/3D视觉技术进行比较。然后,将探索从TOF传感中受益的各种应用,如手势识别,3D扫描和打印等,人数统计等。
2. 工作原理
3D飞行时间(TOF)相机的工作原理是使用调制光源照亮场景,并观察反射光。测量照射和反射之间的相移 (phase shift) 并将其转换为距离。图1说明了TOF的基本概念。通常,是通过固体激光器进行照明,波长在人眼不可见的近红外范围 (~850nm) 工作的LED。成像传感器设计响应相同的光谱接收光,并将光子能量转换为电流。注意,进入传感器的光有一个环境分量和一个反射分量。距离 (深度) 信息只嵌入到反射组件中。因此,高环境分量降低了信噪比(SNR)。
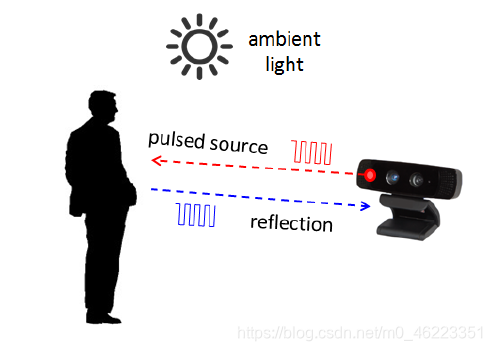 图1: 3D TOF相机工作原理
图1: 3D TOF相机工作原理
为了检测照明和反射之间的相位变化,光源是脉冲 (Pulsed) 或者调制后的连续波 (continuous-wave) ,通常是正弦或方波。方波更为常用,因为更容易通过数字电路1实现。
脉冲调制可以通过将反射光中的光电子积分来实现,或者通过在反射的第一次检测时启动快速计数器来实现。后者需要一个快速的光电探测器,通常是一个单光子雪崩二极管(SPAD)。这种计数方法需要快速的电子技术,因为达到1毫米的精度需要持续时间为6.6皮秒 (picoseconds) 的脉冲。这种精确度在室温2的硅中几乎是不可能达到的。
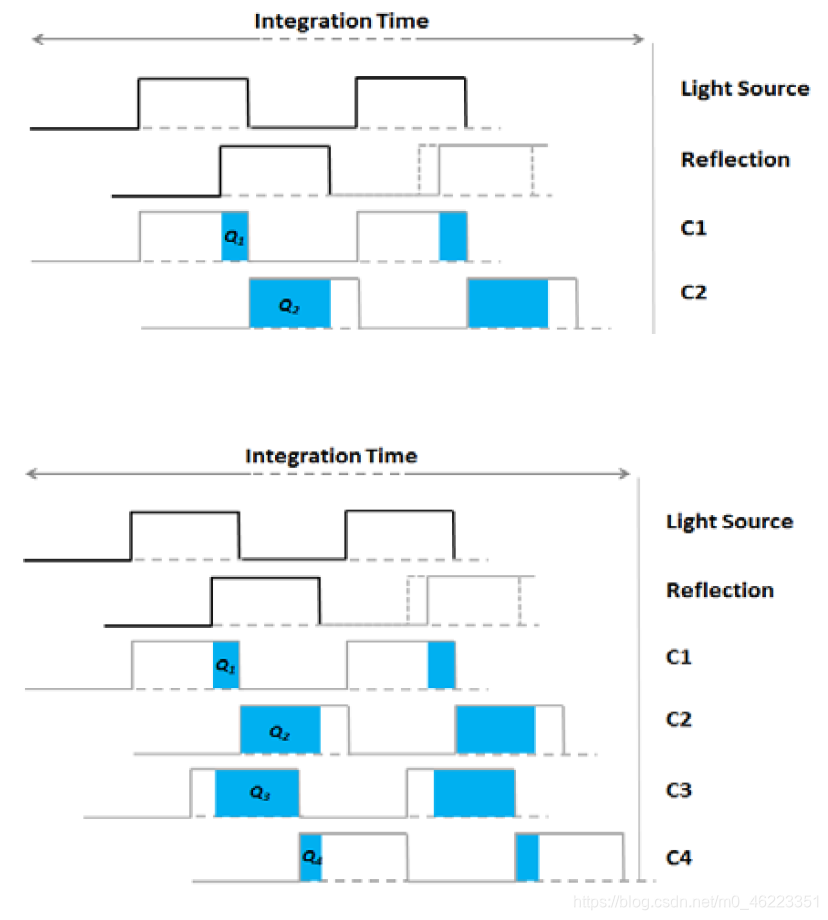 图2:两种TOF实现方法:Pulsed(上)和 CW(下)
图2:两种TOF实现方法:Pulsed(上)和 CW(下)
Pulsed法是直接的,光源在一定周期(
Δ
t
Δt
Δt)下进行照射,每个像素并行的采用两个不同相位的窗口,
C
1
C_1
C1和
C
2
C_2
C2,对反射的能量进行采样,同时使用相同的
Δ
t
Δt
Δt。电荷在采样过程中进行积累,测量得到
Q
1
Q_1
Q1和
Q
2
Q_2
Q2,并使用公式计算距离:
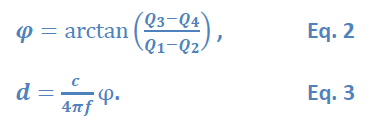
 相比之下,CW方法每次测量都要采样多个样本,每个样本都进行90度的步进,总共四个样本。利用该技术,可以计算出照射与反射之间的相位角
φ
φ
φ,和距离
d
d
d
相比之下,CW方法每次测量都要采样多个样本,每个样本都进行90度的步进,总共四个样本。利用该技术,可以计算出照射与反射之间的相位角
φ
φ
φ,和距离
d
d
d
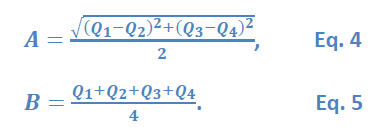
 由此可知,测量的像素强度(
A
A
A)和偏移量(
B
B
B)可由:
由此可知,测量的像素强度(
A
A
A)和偏移量(
B
B
B)可由:
 在所有的方程中,c是光速常数。
在所有的方程中,c是光速常数。
乍一看,CW方法的复杂性,与脉冲方法相比,可能似乎是不合理的,但更仔细地看CW方程中,(
Q
3
−
Q
4
Q_3-Q_4
Q3−Q4)和(
Q
1
−
Q
2
Q_1-Q_2
Q1−Q2)减少了恒定的测量偏移的影响。此外,相位方程中的商减少了来自距离测量的常数增益的影响,如系统放大和衰减,或反射强度。这些都是我们想要的特性。
反射振幅(
A
A
A)和偏移(
B
B
B)对深度测量精度有影响。深度测量方差可近似为:
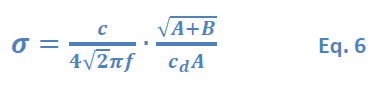 调制对比度,
c
d
c_d
cd,描述了TOF传感器分离和收集光电子的效果。反射振幅
A
A
A是光功率的函数。偏移量
B
B
B是环境光和残差系统的函数。从公式6可以推断,高振幅,高调制频率和高调制对比度将增加精度;而高偏移量会导致饱和和精度降低。
调制对比度,
c
d
c_d
cd,描述了TOF传感器分离和收集光电子的效果。反射振幅
A
A
A是光功率的函数。偏移量
B
B
B是环境光和残差系统的函数。从公式6可以推断,高振幅,高调制频率和高调制对比度将增加精度;而高偏移量会导致饱和和精度降低。
在高频时,由于硅的物理特性,调制对比度开始衰减。这就给调制频率设定了一个实际的上限。具有高 roll-off 频率的TOF传感器通常可以提供更高的精度。
事实上CW的测量是基于环绕着每一个
2
π
2π
2π相位的。这意味着这个距离也会有一个混叠距离(aliasing distance)。发生混叠的距离称为模糊距离(ambiguity distance),
d
a
m
b
d_{amb}
damb,和被定义为:
Eq.7:
d
a
m
b
=
c
2
f
d_{amb}=\frac c{2f}
damb=2fc
因为wraps距离
d
a
m
b
d_{amb}
damb,也是最大可测量的距离。如果希望延长可测量的距离,就需要降低调制频率,但需要以降低精度为代价,如公式6所示。
先进的TOF系统没有接受这种妥协,而是采用多频技术来在不降低调制频率的情况下延长距离。多频技术通过在混合中增加一个或多个调制频率来工作。每个调制频率将有不同的模糊距离(ambiguity distance),但真正的位置是一个不同的频率的信号一致的地方。当两种调制频率一致时的频率称为Beat Frequency,通常较低,对应较长的模糊距离。下图说明双频(dual-frequency)的概念。
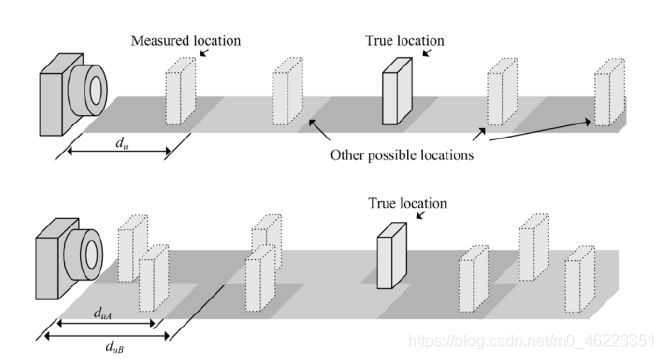 图3: 使用多频技术的扩展距离
图3: 使用多频技术的扩展距离
3. 点云
在TOF传感器中,测量二维可寻址数组中每个像素的距离,从而得到深度图(depth map)。深度图是3D点的集合(每个点也称为 voxel )。例如,QVGA传感器拥有320 x 240 voxels 的深度图。深度图的2D表示是灰度图像,如图中汽水罐示例所示图4强度越亮,voxel越接近。图4显示了一组饮料罐的深度图。
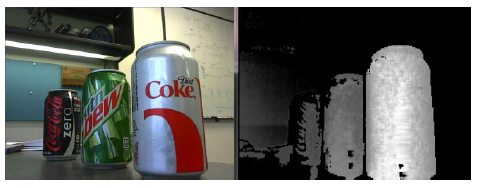 图4:深度图饮料罐
图4:深度图饮料罐
或者,深度图可以在三维空间中以点集合或点云的形式呈现。三维点可以在数学上连接起来,形成一个纹理表面可以映射到其上的网格。如果纹理来自同一主题的实时彩色图像,则将出现该主题的逼真的3D渲染,如图5中的化身所示。可以旋转化身以查看不同的视角。
 图5:人像点云图
图5:人像点云图

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









