







 步进电机将电脉冲转化为角位移,通过控制脉冲数量、频率和顺序实现转向、速度和角度控制。常见分类包括反应式、永磁式和混合式,以及二相至五相的绕组形态。精度通常为步进角的3-5%,并可选择开环或闭环控制系统进行定位。
步进电机将电脉冲转化为角位移,通过控制脉冲数量、频率和顺序实现转向、速度和角度控制。常见分类包括反应式、永磁式和混合式,以及二相至五相的绕组形态。精度通常为步进角的3-5%,并可选择开环或闭环控制系统进行定位。
目录
简介
目的:项目开发使用到了步进电机,本文初步介绍了步进电机分类、重要参数、特性及其控制。通过本文可了解步进电机基本原理,主要控制参数,控制主要特性,及其控制原理,文章最后附简易原理图。
一、步进电机的概念
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
通过控制施加在电机线圈上的电脉冲顺序、 频率和数量, 可以实现对步进电机的转向、 速度和旋转角度的控制。一般步进电机的精度为步进角(下文有主要参数计算章节)的 3-5%,且不累积。
步进电机的分类
根据构造形态分类:反应式、永磁式、混合式。

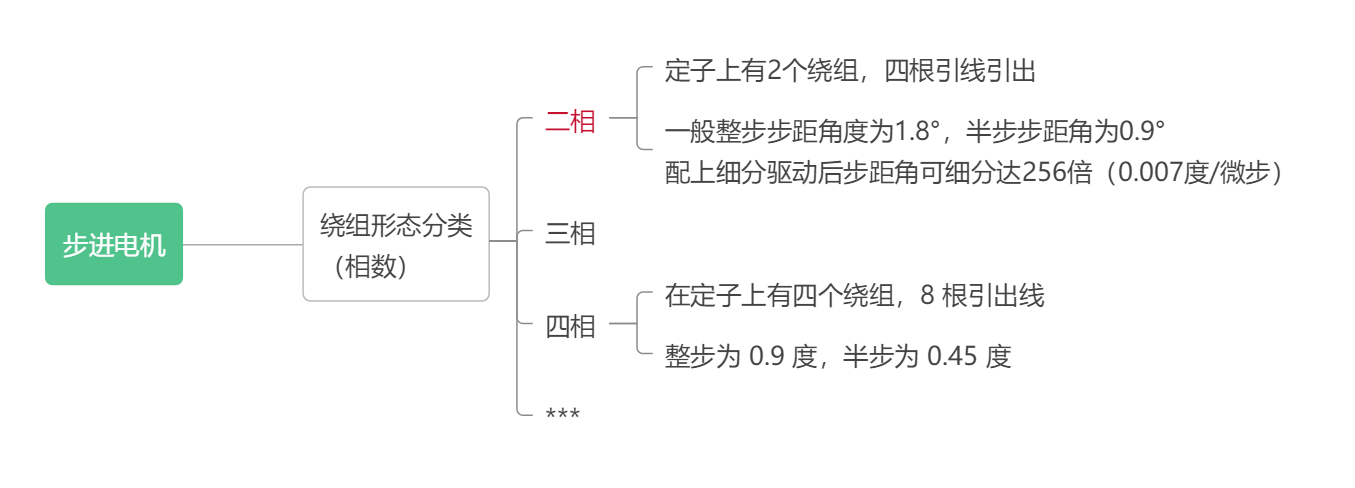
根据绕组形态分类:二相、三相、四相、五相等。步进电机的总极数越大,加工精度的要求就会越高。通常工业用混合型步进电机的步距角是1.8度,就是200极(极等同于步)。
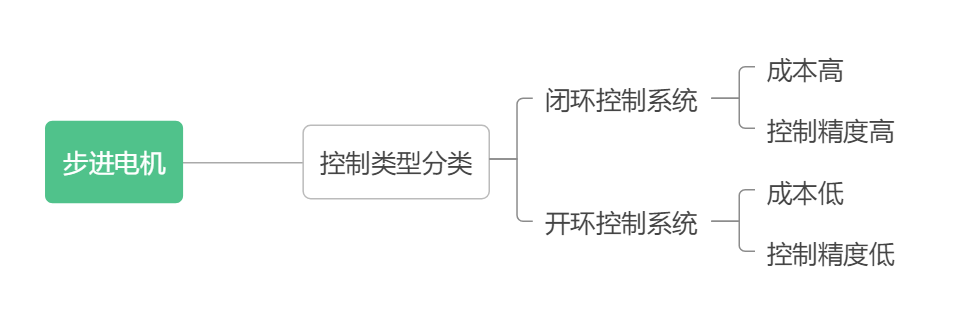
根据控制类型可分为开环控制和闭环控制,开环控制不带位置传感器,闭环控制带位置传感器(如霍尔传感器)检测位置(角度)。



















 5497
5497

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











