




无刷空心杯电机作为高精度驱动系统的核心部件,通常需搭配减速机以实现低转速、高扭矩输出。以下是当前主流的减速机类型、市场占比、参数对比及优劣势分析,结合行业数据与典型应用场景展开说明:
一、主流减速机类型及市场占比
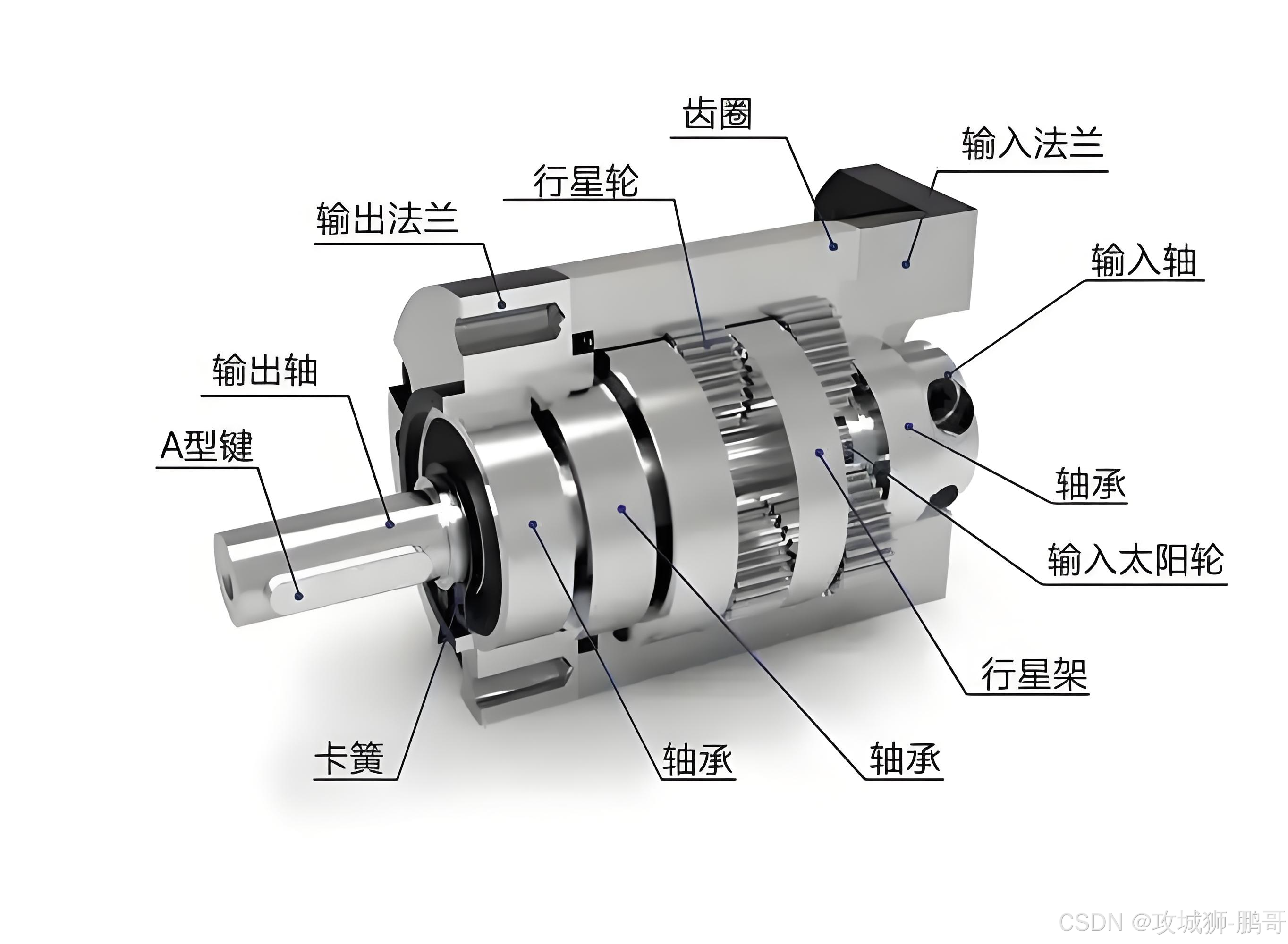
1. 行星减速机
市场占比:约 45%-55%(工业自动化领域占比超 60%)
典型参数:
减速比:3-1000(单级 3-10,多级可达 1000)
传动效率:90%-98%(单级 95% 以上,多级略降)
背隙:3-15 弧分(精密型≤5 弧分)
输出扭矩:0.1-1000 N·m
寿命:2 万 - 5 万小时(高负载下寿命缩短)
优势:
高刚性与精度:行星齿轮对称分布,抗冲击能力强,适合精密定位(如半导体设备)。
高效率:传动损失小,发热低,适合连续运行(如医疗泵)。
结构紧凑:体积小,重量轻(如 10mm 空心杯电机配套行星减速机总重 < 50g)。
劣势:
成本较高:精密加工导致价格是谐波减速机的 1.5-2 倍。
减速比受限:多级行星减速机效率下降明显(三级效率约 80%)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4478
4478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











