






原理:
从官方解释看的时候很蒙蔽好吧,但是知乎上有一博主的解释让人不得不说好,通俗易懂,https://www.zhihu.com/question/47559783
都说的太学究了,大概是这么一回事:我需要用传感器测量一个数据,想要提高测量精度。
1,如果我有很多个传感器,那怎么办?
答:取多个传感器的平均值
2,如果我的多个传感器精度不一样,那怎么办?
答:对于精度高的传感器,我多相信一点,对于精度低的,我少相信一点,然后综合考虑他们给出的结果,在数学上叫做“加权平均”
3,在实时测量中,我并没有很多传感器,但是我还是想要提高精度,怎么办。
3,在实时测量中,我并没有很多传感器,但是我还是想要提高精度,怎么办。
之前在网上根据公式之类的看原理,感觉陷进去了,不能很通俗的去理解含义
测试代码如下。
# -*- coding: utf-8 -*-
import numpy
import numpy as np
import matplotlib.pyplot as plt
import csv
import pandas as pd
def KalmanFilter(z, n_iter):
# intial parameters
sz = (n_iter,) # size of array
Q = 0.0004 # process variance
# allocate space for arrays
xhat = numpy.zeros(sz) # a posteri estimate of x
P = numpy.zeros(sz) # a posteri error estimate
xhatminus = numpy.zeros(sz) # a priori estimate of x
Pminus = numpy.zeros(sz) # a priori error estimate
K = numpy.zeros(sz) # gain or blending factor
R = 0.6 # estimate of measurement variance, change to see effect
# intial guesses
xhat[0] = z[0]
# P[0] = 1.0 #### intial value is not good
P[0] = 0
A = 1
H = 1
for k in range(1, n_iter):
# time update
xhatminus[k] = A * xhat[k - 1] # X(k|k-1) = AX(k-1|k-1) + BU(k) + W(k),A=1,BU(k) = 0, w()
Pminus[k] = A * P[k - 1] + Q # P(k|k-1) = AP(k-1|k-1)A' + Q(k) ,A=1
# measurement update
K[k] = Pminus[k] / (Pminus[k] + R) # Kg(k)=P(k|k-1)H'/[HP(k|k-1)H' + R],H=1
xhat[k] = xhatminus[k] + K[k] * (z[k] - H * xhatminus[k]) # X(k|k) = X(k|k-1) + Kg(k)[Z(k) - HX(k|k-1)], H=1
P[k] = (1 - K[k] * H) * Pminus[k] # P(k|k) = (1 - Kg(k)H)P(k|k-1), H=1
return xhat
data=pd.read_csv("../data_csv/result.csv",header=None)
list=data.values.tolist()
list_2 = [float(x) for item in list for x in item] ##list_2为原始数据
# print(list_2)
A = KalmanFilter(list_2,len(list_2))
# print (A)
plt.figure(1)
plt.plot(list_2)
plt.plot(A)
plt.show()
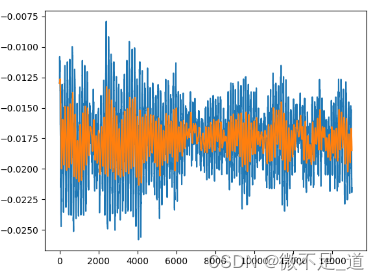
测试时可以先将Q从小往大调整,将R从大往小调整;先固定一个值去调整另外一个值,看收敛速度与波形输出。
在去年做的项目中聚焦一类的需要电压来控制物镜离焦距离,所以就涉及到了数据的处理方式,最开始的各种滤波都试过,效果一般,就用了kalman,效果还不错。。。
仿真测试结果如下














 353
353











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









