







Kalman Filter
0.引言
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
1.Kalman Filter
理论上,kalman滤波器需要三个重要假设:
1)被建模的系统是线性的;
2)影响测量的噪声属于白噪声;
3)噪声本质上是高斯分布的。
第一条假设是指 k k k时刻的系统状态可以用某个矩阵(状态转移矩阵)与 k − 1 k-1 k−1时刻的系统状态的乘积表示。余下两条假设,即噪声是高斯分布的白噪声,其含义为噪声与时间不相关,且只用均值和协方差就可以准确地为幅值建模。
在kalman滤波器滤波器应用中,一般考虑三种运动:
1)动态运动:这种运动是我们期望的前次测量时系统状态的直接结果,如匀速运动等。
2)控制运动:这种运动是我们期望的,由于某种已知的外部因素以某种原因施加于系统,如加速运动等。
3)随机运动:随机的无规则运动,在Kalman滤波器中,至少是可以用高斯模型有效地来建模。

以下建模中,
x
k
x_k
xk对应
x
t
x_t
xt,
z
k
z_k
zk对应
y
t
y_t
yt.系统中带求解的即为状态量
x
k
x_k
xk或者
x
t
x_t
xt。
1.1. 建模
- 状态方程(运动方程): x k = A x k − 1 + B u k − 1 + w k − 1 x_{k}=A x_{k-1}+B u_{k-1}+w_{k-1} xk=Axk−1+Buk−1+wk−1
- 观测方程(Landmark): z k = H x k + v k z_{k}=H x_{k}+v_{k} zk=Hxk+vk
假设测量方程中,测量传感器不止一种, z k z_{k} zk则为多维的列向量,包含每一种传感器的测量值,而每一种测量值都不准确(含有噪声)。卡尔曼滤波器的数据融合功能就正是体现在测量矩阵 H H H中。
x ( k ) x(k) x(k)是 k k k时刻的系统状态, u ( k ) u(k) u(k)是 k k k时刻对系统的控制量。 A A A是传输参数、 B B B是控制参数,都是系统参数,对于多模型系统,他们为矩阵。 z ( k ) z(k) z(k)是 k k k时刻的测量值, H H H是测量系统的参数,对于多测量系统, H H H为观测矩阵。 w ( k ) w(k) w(k)和 v ( k ) v(k) v(k)分别表示状态和测量的噪声。均假设为高斯白噪声,协方差分别是 Q , R Q,R Q,R。
- 协方差表达不确定性(噪声传递)
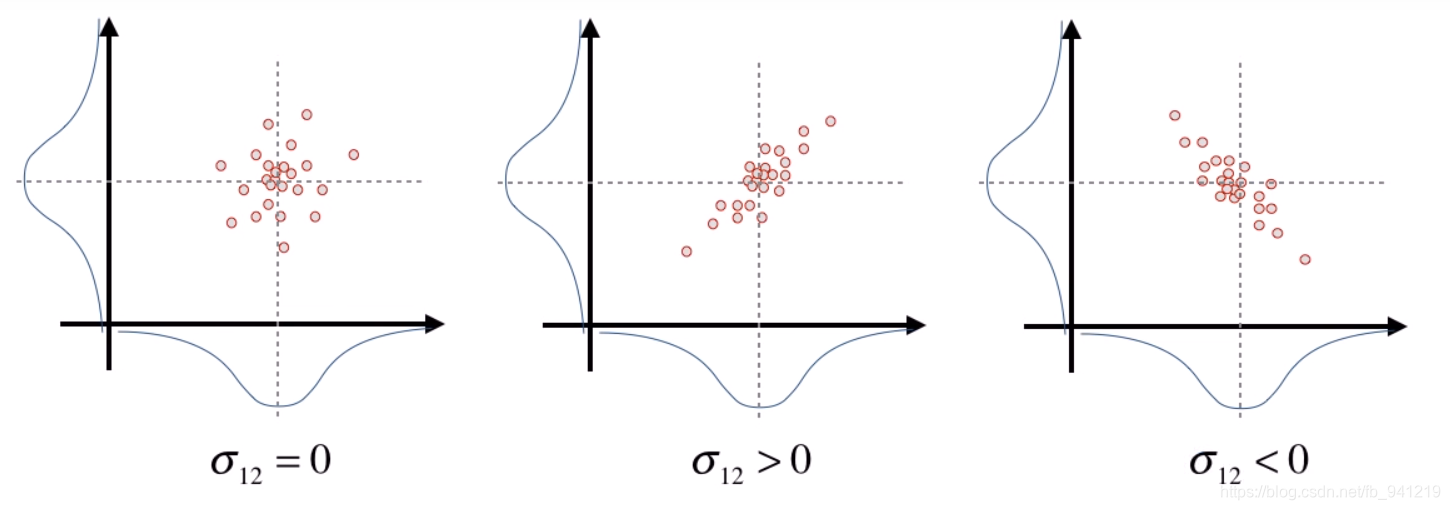 cov
(
x
,
x
)
=
[
σ
11
σ
12
σ
12
σ
22
]
\operatorname{cov}(x, x)=\left[\begin{array}{cc}{\sigma_{11}} & {\sigma_{12}} \\ {\sigma_{12}} & {\sigma_{22}}\end{array}\right]
cov(x,x)=[σ11σ12σ12σ22]
cov
(
x
,
x
)
=
[
σ
11
σ
12
σ
12
σ
22
]
\operatorname{cov}(x, x)=\left[\begin{array}{cc}{\sigma_{11}} & {\sigma_{12}} \\ {\sigma_{12}} & {\sigma_{22}}\end{array}\right]
cov(x,x)=[σ11σ12σ12σ22]
1.2. 五个重要公式
- 系统模型
- 状态方程(运动方程): x k = A x k − 1 + B u k − 1 + w k − 1 x_{k}=A x_{k-1}+B u_{k-1}+w_{k-1} xk=Axk−1+Buk−1+wk−1 , p ( w ) ∈ N ( 0 , Q ) p(w)\in N(0,Q) p(w)∈N(0,Q)
- 观测方程(Landmark): z k = H x k + v k z_{k}=H x_{k}+v_{k} zk=Hxk+vk, p ( v ) ∈ N ( 0 , R ) p(v)\in N(0,R) p(v)∈N(0,R)
- 预测:
x
^
k
−
=
A
x
^
k
−
1
+
B
u
k
−
1
(
1
)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\hat{x}_{k}^{-}=A \hat{x}_{k-1}+B u_{k-1} ~~~ ~~~~~~~~~~~(1)
x^k−=Ax^k−1+Buk−1 (1)
先验估计 x ^ k − \hat{x}_{k}^{-} x^k−为根据系统的转移方程计算所得 ,对比系统模型,少了过程噪声,因此并不是最佳的估计值。上一次的后验估计 x ^ k − 1 \hat{x}_{k-1} x^k−1。
P k − = A P k − 1 A T + Q ( 2 ) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~P_{k}^{-}=A P_{k-1} A^{T}+Q ~~~ ~~~~~~~~~~~~(2) Pk−=APk−1AT+Q (2)
-
P k − P_{k}^{-} Pk−为先验误差协方差矩阵,是推导过程中产生的变量。 P k − = E [ e k − e k − T ] P_{k}^{-}=E[e_k^{-}e_k^{-T}] Pk−=E[ek−ek−T]----> e k − = x k − x ^ k − e_k^{-}=x_k-\hat{x}_k^{-} ek−=xk−x^k−
-
P k P_k Pk为后验误差协方差矩阵,是推导过程中产生的变量。 P k = E [ e k e k T ] P_k = E[e_ke_k^{T}] Pk=E[ekekT]----> e k = x k − x ^ k e_k=x_k-\hat{x}_k ek=xk−x^k
-
等式(2)实际为为噪声协方差的传递。
- 校正:
K
k
=
P
k
−
H
T
(
H
P
k
−
H
T
+
R
)
−
1
(
3
)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~K_{k}=P_{k}^{-} H^{T}\left(H P_{k}^{-} H^{T}+R\right)^{-1}~~(3)
Kk=Pk−HT(HPk−HT+R)−1 (3)
- K k K_{k} Kk权衡预测量的协方差矩阵 P P P与观测量系协方差矩阵 R R R的大小,来决定系统是相信预测模型多一点还是相信测量模型多一点。
- 将残差的表现形式从观测域转换到状态域。即是卡尔曼系数 K k K_k Kk解释了为什么可以用观测模型的值去更新状态模型中的值(两个域的量纲是不同的)。
x ^ k = x ^ k − + K k ( z k − H x ^ k − ) ( 4 ) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~\hat{x}_{k}=\hat{x}_{k}^{-}+K_{k}\left(z_{k}-H \hat{x}_{k}^{-}\right)~~~~~~~~(4) x^k=x^k−+Kk(zk−Hx^k−) (4)
- ( z k − H x ^ k − ) \left(z_{k}-H \hat{x}_{k}^{-}\right) (zk−Hx^k−)表示实际观测值与预测观测值的残差,乘上系数 K k K_k Kk(卡尔曼增益)就可以修正先验估计值 x ^ k − \hat{x}_{k}^{-} x^k−。
-
x
^
k
\hat{x}_{k}
x^k,后验估计值。就是最后需要的值。
P k = ( I − K k H ) P k − ( 5 ) ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~P_{k}=\left(I-K_{k} H\right) P_{k}^{-}~~~~~~~~~~~~~~~~(5) Pk=(I−KkH)Pk− (5)
最后这一个公式是在为下一轮的迭代做准备,噪声协方差矩阵的更新,这一步中,状态的不确定性是在减小的(校正),在下一轮根据状态方程传递(预测)时不确定性又会增大。
| 变量 | 含义 |
|---|---|
| x ^ k − = A x ^ k − 1 + B u k − 1 \hat{x}_{k}^{-} = A \hat{x}_{k-1}+B u_{k-1} x^k−=Ax^k−1+Buk−1 | 状态先验估计 |
| x ^ k = x ^ k − + K k ( z k − H x ^ k − ) \hat{x}_{k}=\hat{x}_{k}^{-}+K_{k}\left(z_{k}-H \hat{x}_{k}^{-}\right) x^k=x^k−+Kk(zk−Hx^k−) | 状态后验估计 |
| A A A | 状态转移矩阵 |
| B B B | 输入控制矩阵,外界的影响如何转化为对状态的影响 |
| $u_{k-1} $ | 外部激励输入 |
| w k − 1 ∈ N ( 0 , Q ) w_{k-1}\in N(0,Q) wk−1∈N(0,Q) | 过程噪声, Q Q Q=过程噪声协方差矩阵 |
| z k z_k zk | K K K时刻的观测值 |
| H H H | 观测矩阵 |
| v k ∈ N ( 0 , R ) v_{k}\in N(0,R) vk∈N(0,R) | 测量噪声, R R R=测量噪声协方差矩阵 |
| P k = E [ e k e k T ] P_k = E[e_ke_k^{T}] Pk=E[ekekT]----> e k = x k − x ^ k e_k=x_k-\hat{x}_k ek=xk−x^k | (后验)误差协方差矩阵 |
| P k − = E [ e k − e k − T ] P_{k}^{-}=E[e_k^{-}e_k^{-T}] Pk−=E[ek−ek−T]----> e k − = x k − x ^ k − e_k^{-}=x_k-\hat{x}_k^{-} ek−=xk−x^k− | 先验误差协方差矩阵 |
| K k = P k − H T ( H P k − H T + R ) − 1 K_{k}=P_{k}^{-} H^{T}\left(H P_{k}^{-} H^{T}+R\right)^{-1} Kk=Pk−HT(HPk−HT+R)−1 | kalman增益 |

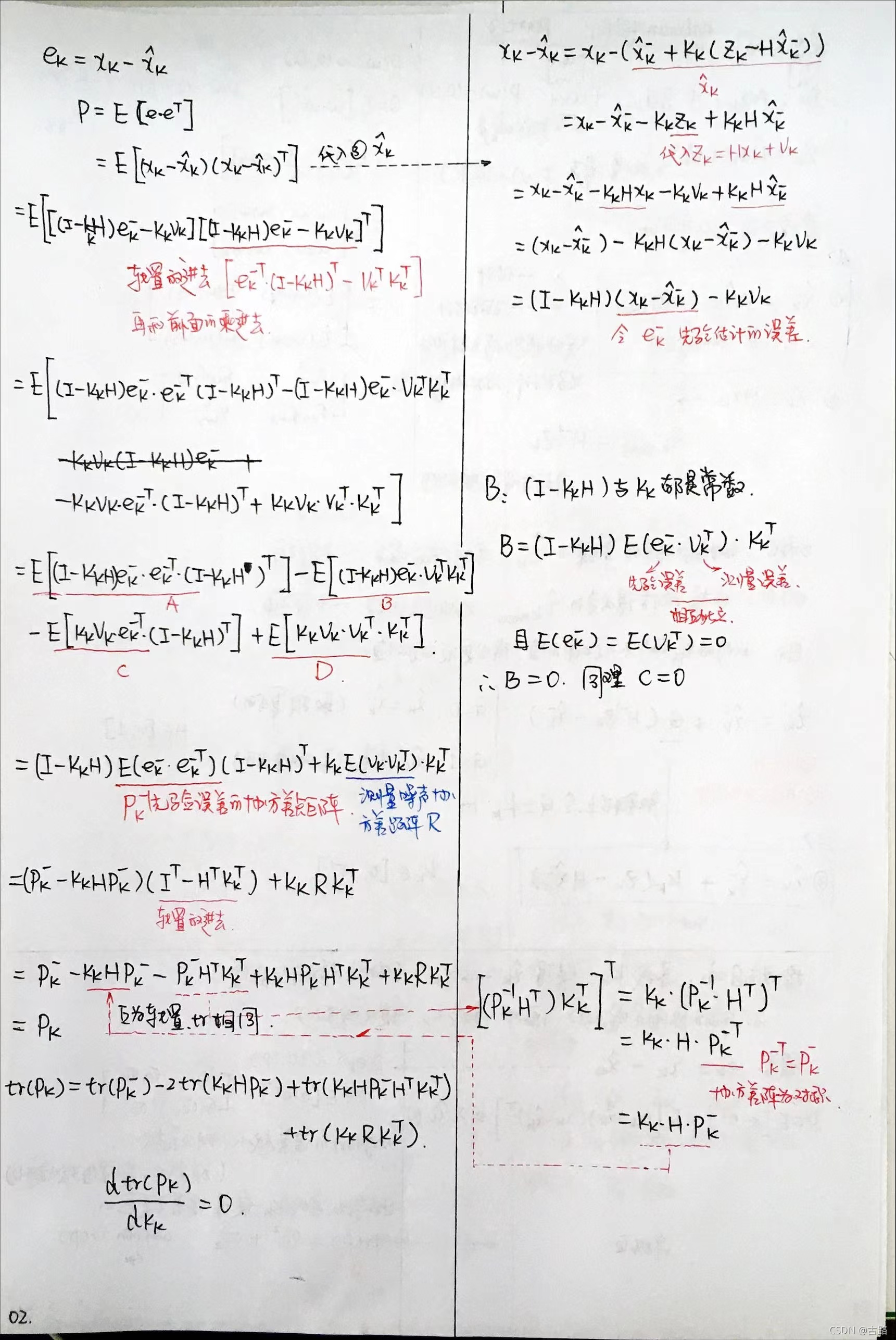
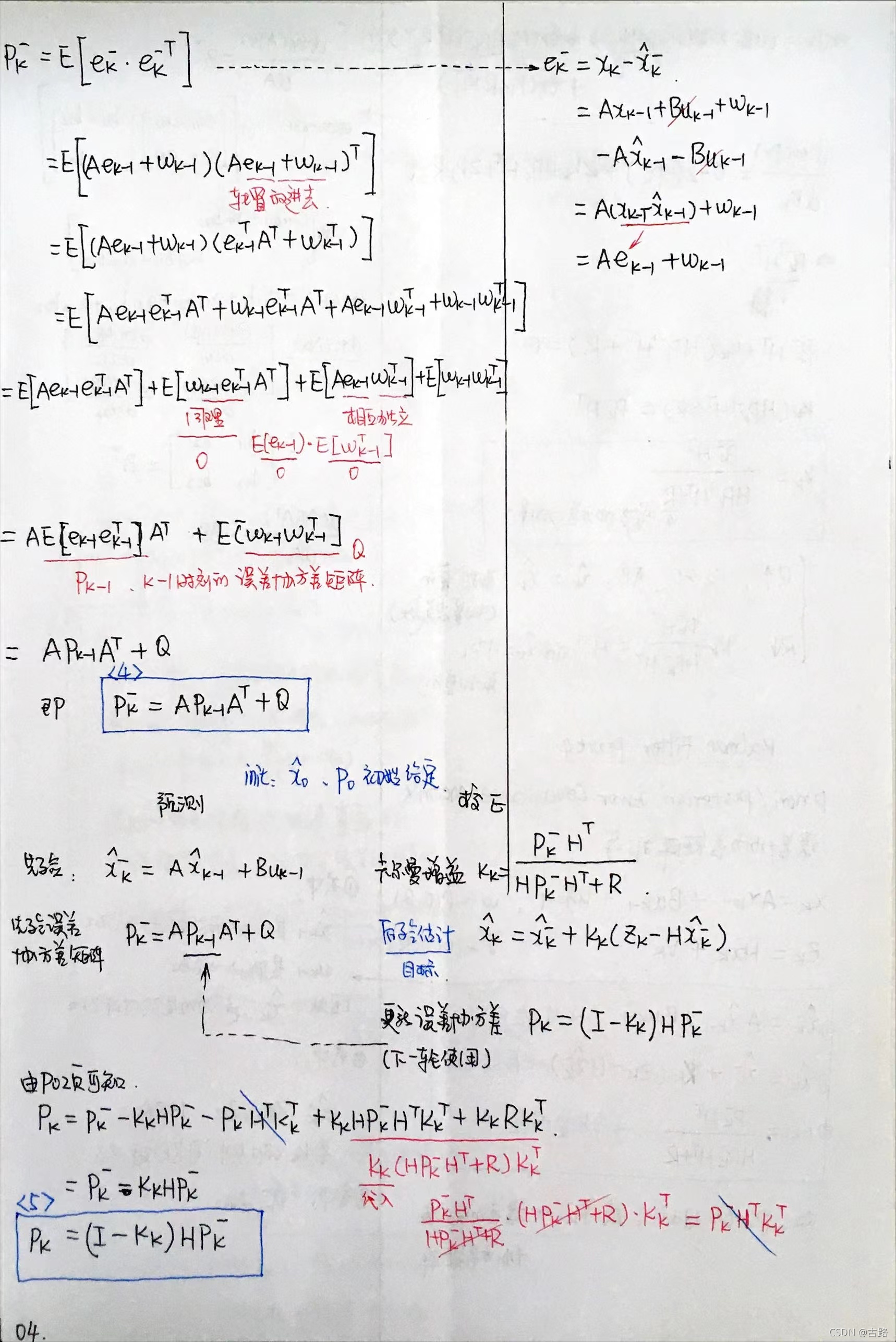
2.推导
- 推导部分参考的 DR_CAN 的推导
- 有人将其整理了出来
- 以下是我的笔记


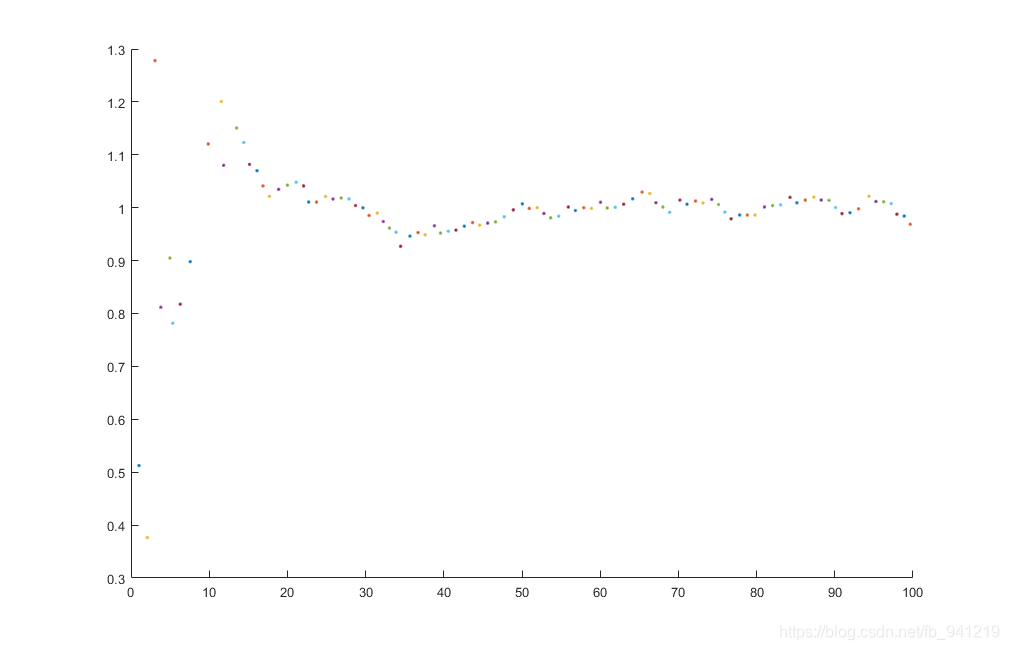
3.MatlabDemo
小车运动模型:
Z=(1:100);%观测值
noise=randn(1,100);%方差为1 的噪声
Z=Z+noise;
X=[0;0];%状态
P=[1 0;0 1];%状态协方差
F=[1 1;0 1];%状态转移矩阵
Q=[0.0001,0;0 0.0001];%状态转移矩阵协方差
H=[1 0];%观测矩阵
R=1;%观测噪声方差
figure;
hold on
for i=1:100
X_ = F*X;
P_ = F*P*F' + Q;
K = P_*H'/(H*P_*H'+R);
X = X_+K*(Z(i)-H*X_);
P = (eye(2)-K*H)*P_;
plot(X(1),X(2),'.'); %画点,横轴表示位置,纵轴表示速度
end
状态量:速度。观测量:位置。
DEMO2
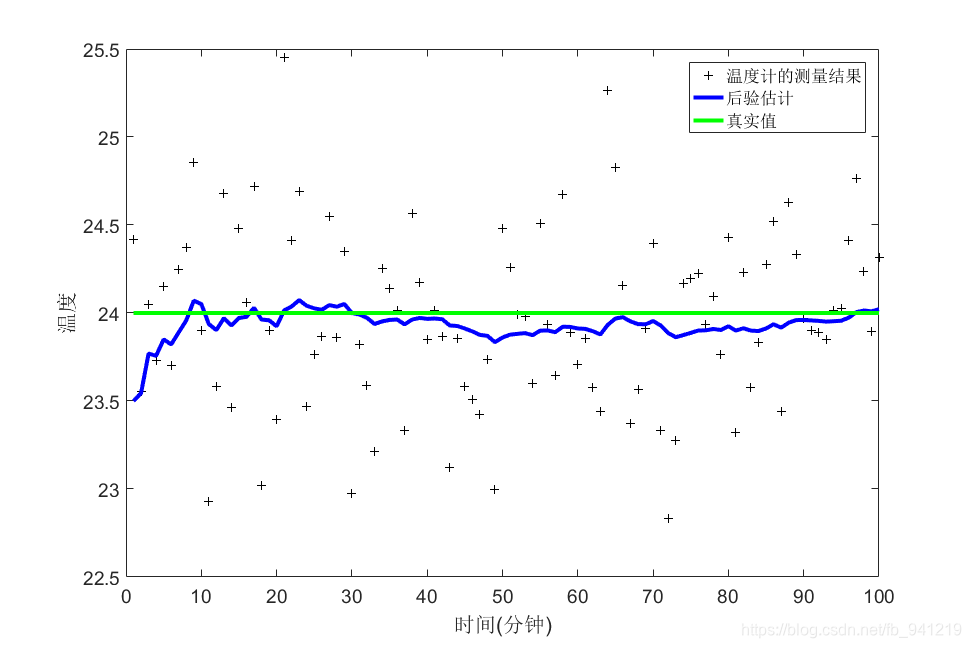
%房间当前温度真实值为24度,认为下一时刻与当前时刻温度相同,误差为0.02度(即认为连续的两个时刻最多变化0.02度)。
%温度计的测量误差为0.5度。
%开始时,房间温度的估计为23.5度,误差为1度。
clear all;
close all;
% intial parameters
n_iter = 100; %计算连续n_iter个时刻
sz = [n_iter, 1]; % size of array. n_iter行,1列
x = 24; % 度的真实值
Q = 4e-4; % 过程方差, 反应连续两个时刻温度方差。更改查看效果
R = 0.25; % 测量方差,反应温度计的测量精度。更改查看效果
z = x + sqrt(R)*randn(sz); % z是温度计的测量结果,在真实值的基础上加上了方差为0.25的高斯噪声。
% 对数组进行初始化
xhat=zeros(sz); % 对温度的后验估计。即在k时刻,结合温度计当前测量值与k-1时刻先验估计,得到的最终估计值
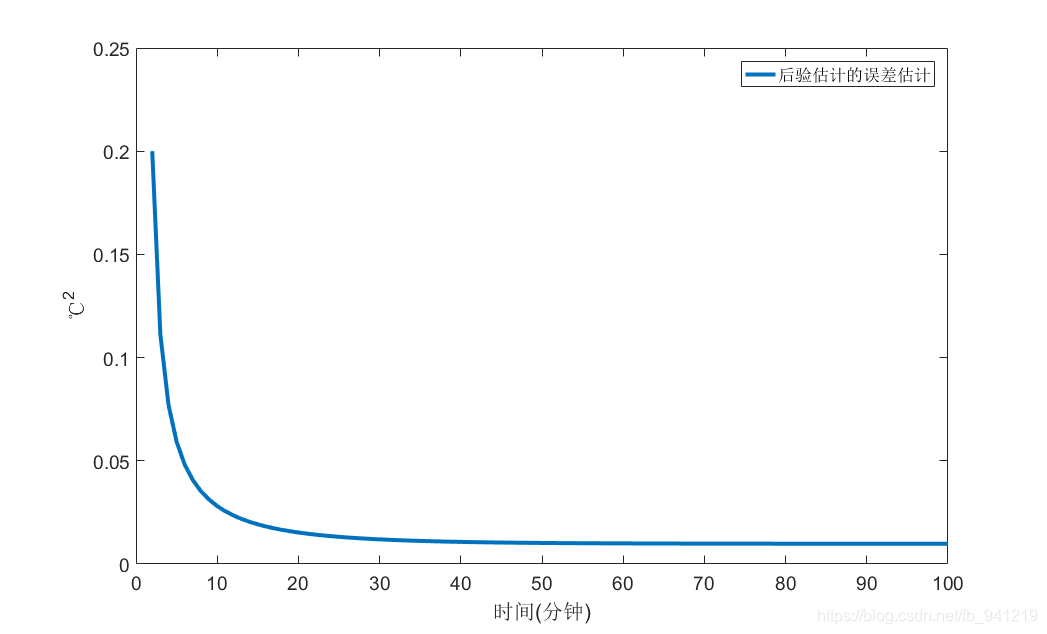
P=zeros(sz); % 后验估计的方差
xhatminus=zeros(sz); % 温度的先验估计。即在k-1时刻,对k时刻温度做出的估计
Pminus=zeros(sz); % 先验估计的方差
K=zeros(sz); % 卡尔曼增益,反应了温度计测量结果与过程模型(即当前时刻与下一时刻温度相同这一模型)的可信程度
% intial guesses
xhat(1) = 23.5; %温度初始估计值为23.5度
P(1) =1; %误差方差为1
for k = 2:n_iter
% 时间更新(预测)
xhatminus(k) = xhat(k-1); %用上一时刻的最优估计值来作为对当前时刻的温度的预测
Pminus(k) = P(k-1)+Q; %预测的方差为上一时刻温度最优估计值的方差与过程方差之和
% 测量更新(校正)
K(k) = Pminus(k)/( Pminus(k)+R ); %计算卡尔曼增益
xhat(k) = xhatminus(k)+K(k)*(z(k)-xhatminus(k)); %结合当前时刻温度计的测量值,对上一时刻的预测进行校正,得到校正后的最优估计。该估计具有最小均方差
P(k) = (1-K(k))*Pminus(k); %计算最终估计值的方差
end
FontSize=14;
LineWidth=3;
figure();
plot(z,'k+'); %画出温度计的测量值
hold on;
plot(xhat,'b-','LineWidth',LineWidth) %画出最优估计值
hold on;
plot(x*ones(sz),'g-','LineWidth',LineWidth); %画出真实值
legend('温度计的测量结果', '后验估计', '真实值');
xl=xlabel('时间(分钟)');
yl=ylabel('温度');
set(xl,'fontsize',FontSize);
set(yl,'fontsize',FontSize);
hold off;
set(gca,'FontSize',FontSize);
figure();
valid_iter = [2:n_iter]; % Pminus not valid at step 1
plot(valid_iter,P([valid_iter]),'LineWidth',LineWidth); %画出最优估计值的方差
legend('后验估计的误差估计');
xl=xlabel('时间(分钟)');
yl=ylabel('℃^2');
set(xl,'fontsize',FontSize);
set(yl,'fontsize',FontSize);
set(gca,'FontSize',FontSize);
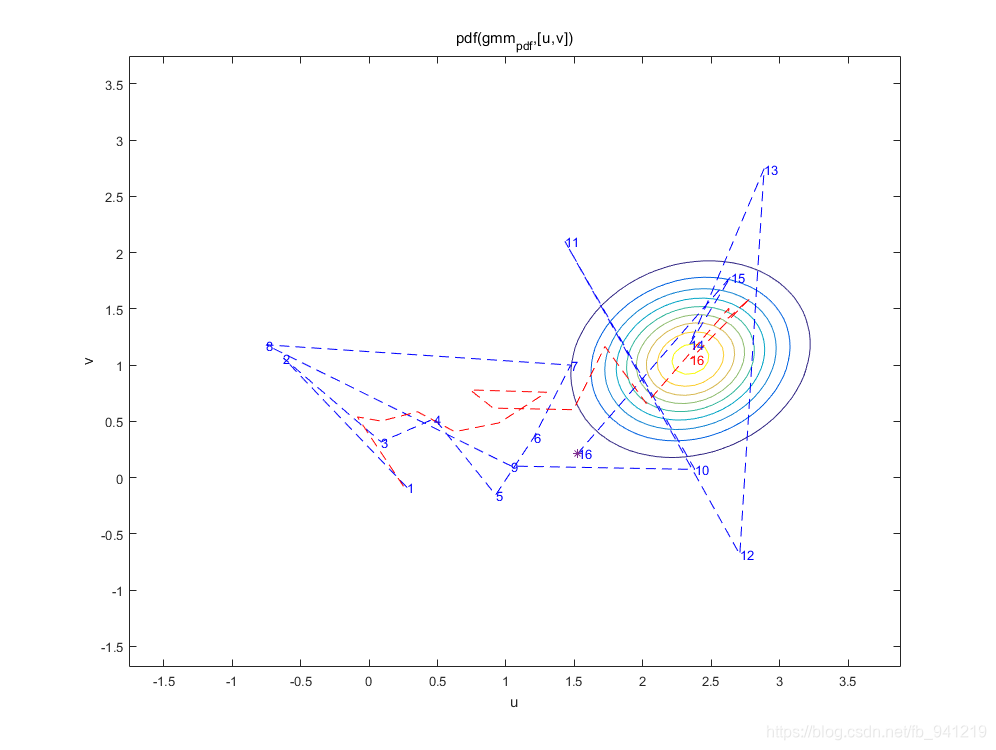
DEMO3
徐老师demo,同样是小车二维运动,描述在PPT上:
% --------------------------------------
% Kalman Filter demos
% written by Richard Xu
% yida.xu@uts.edu.au, July, 2014
% --------------------------------------
clc;
clear;
% --------------------------------------------------------------------
% Synthetically generate data from nominated Kalman Filter parameters
% --------------------------------------------------------------------
% for p(x_1)初始化参数
init_mu = [ 0 0]';
init_var = [ 5 0; 0 5];
% transition probability 运动方程
A = [1 0; 0 1];
B = [0.2 0.1]';
Q = [0.1 0.05; 0.05 0.1];
%Q = [1E-5 0; 0 1E-5];
% fixed parameters 测量方程
H = [1 0; 0 1];
R = [0.5 -0.05; -0.05 0.5];
%R = [1E-5 0 ; 0 1E-5];
T = 16; %测量数据次数
xs(1,:) = [0 0];%初始状态量,位置+速度
for t=2:T
xs(t,:) = (A * xs (t-1,:)')' + B' + mvnrnd([0 0], Q );
end
% data is a sequence of y 观测值
data = xs + mvnrnd([0 0],R,T);
data = data';
%update = Kalman_posterior (data, A, B, Q, H, R, T, init_mu, init_var);
update_mu = zeros(2,T);
update_Sigma = zeros(2,2,T);
predict_mu = zeros(2,T);
predict_Sigma = zeros(2,2,T);
for t=1:T
% --------------------------------
% Kalman Filter update
% --------------------------------
if t == 1
predict_mu(:,1) = init_mu;
predict_Sigma(:,:,1) = init_var;
else
predict_mu(:,t) = A * update_mu(:,t-1) + B;% 等式(1)
predict_Sigma(:,:,t) = A * update_Sigma(:,:,t-1) * A' + Q; %等式(2)
end
S = H * predict_Sigma(:,:,t) * H' + R;
K = predict_Sigma(:,:,t) * H' * inv(S); %等式(3)
update_mu(:,t) = predict_mu(:,t) + K * (data(:,t) - H * predict_mu(:,t)); %等式(4)
update_Sigma(:,:,t) = (eye(size(R,2)) - K * H ) * predict_Sigma(:,:,t); %等式(5)
%display(update_mu(:,t));
display(update_Sigma(:,:,t));
% --------------------------------
% The plot 绘图演示,以下可以不用管,只是为了演示
% --------------------------------
gmm_pdf = gmdistribution(update_mu(:,t)',update_Sigma(:,:,t),1);
ezcontour(@(u,v)pdf(gmm_pdf,[u v]));
hold on;
plot(data(1,1:t),data(2,1:t),'--','color',[0 0 1]);
axis([min(data(1,:))-1 max(data(1,:))+1 min(data(2,:))-1 max(data(2,:))+1]);
hold on;
plot(update_mu(1,1:t),update_mu(2,1:t),'--','color',[1 0 0]);
text(update_mu(1,t),update_mu(2,t), num2str(t), 'color', [ 1 0 0]);
axis([min(data(1,:))-1 max(data(1,:))+1 min(data(2,:))-1 max(data(2,:))+1]);
hold on;
plot(data(1,t:T),data(2,t:T),'--','color',[0.7 0.7 0.7]);
axis([min(data(1,:))-1 max(data(1,:))+1 min(data(2,:))-1 max(data(2,:))+1]);
hold on;
plot(data(1,t),data(2,t),'*');
for s=1:T
text(data(1,s),data(2,s), num2str(s), 'color',[ 0 0 1]);
hold on;
end
hold off;
waitforbuttonpress;
end
DEMO4:
同样是小车模型,状态量为速度+位置,测量为位置。模型推导在徐老师PPT里面也有推导,也可以参考这篇文章。
% Kalman Example 1
dt = 1;
P = [ 25, 0;
0, 1; ];
X = [ 0;
0; ];
R = [ 1; ];
F = [ 1, dt;
0, 1; ];
H = [ 1, 0; ];
Q = (1e-6) * [ (dt^4)/4, (dt^3)/2;
(dt^3)/2, dt^2; ];
pos = 0;
velocities = zeros(1, 100);
positions = zeros(1, 100);
truePositions = zeros(1, 100);
for i = 1 : 100
Xp = F*X;
Pp = F*P*F' + Q;
K = (Pp*H')/(H*Pp*H' + R);
y = (pos+randn()) - H*Xp;
X = Xp + K*y;
P = Pp - K*H*Pp;
velocities(i) = X(2);
positions(i) = X(1);
truePositions(i) = pos;
pos = pos + 0.1;
end
plot(linspace(0, 100, 100), velocities, 'r');
title('Estimated Velocity');
xlabel('s')
ylabel('m/s');
figure;
plot(linspace(0, 100, 100), positions, 'r');
title('Estimated Position');
xlabel('s')
ylabel('m');
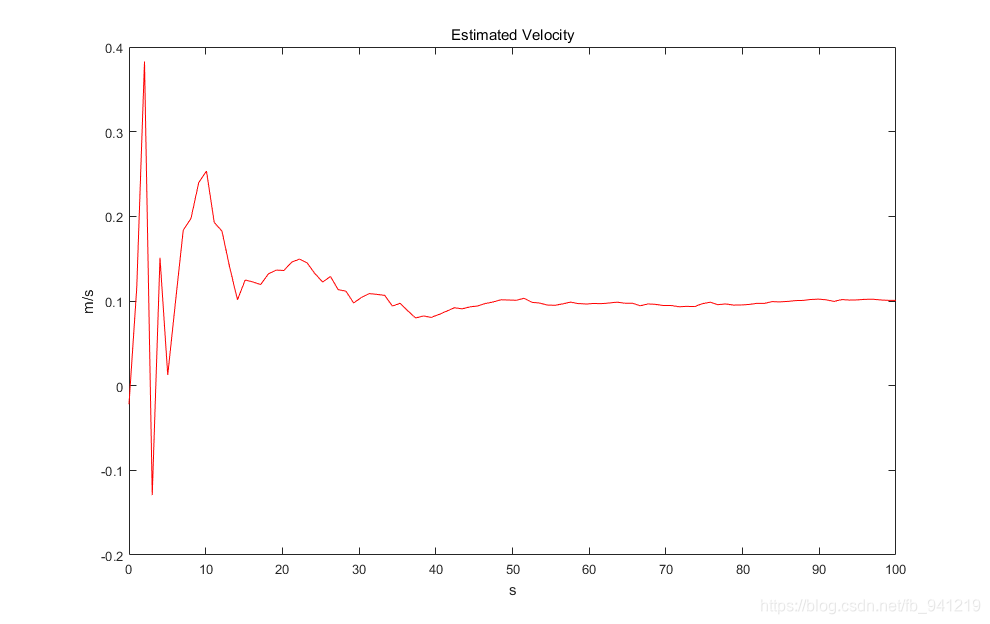

迭代过程如上图所示,状态量速度逐渐稳定在0.1左右,状态量位置逐渐稳定为线性模型。














 3609
3609











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









