






记录遇到的一些错误
错误一:
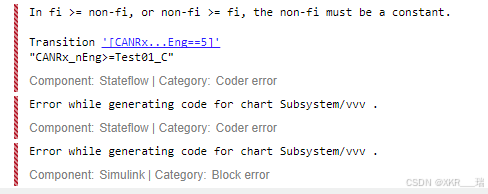
原因:输入源头未定义具体的数据类型。
解决措施:定义具体的数据类型,不可选择继承
错误二:
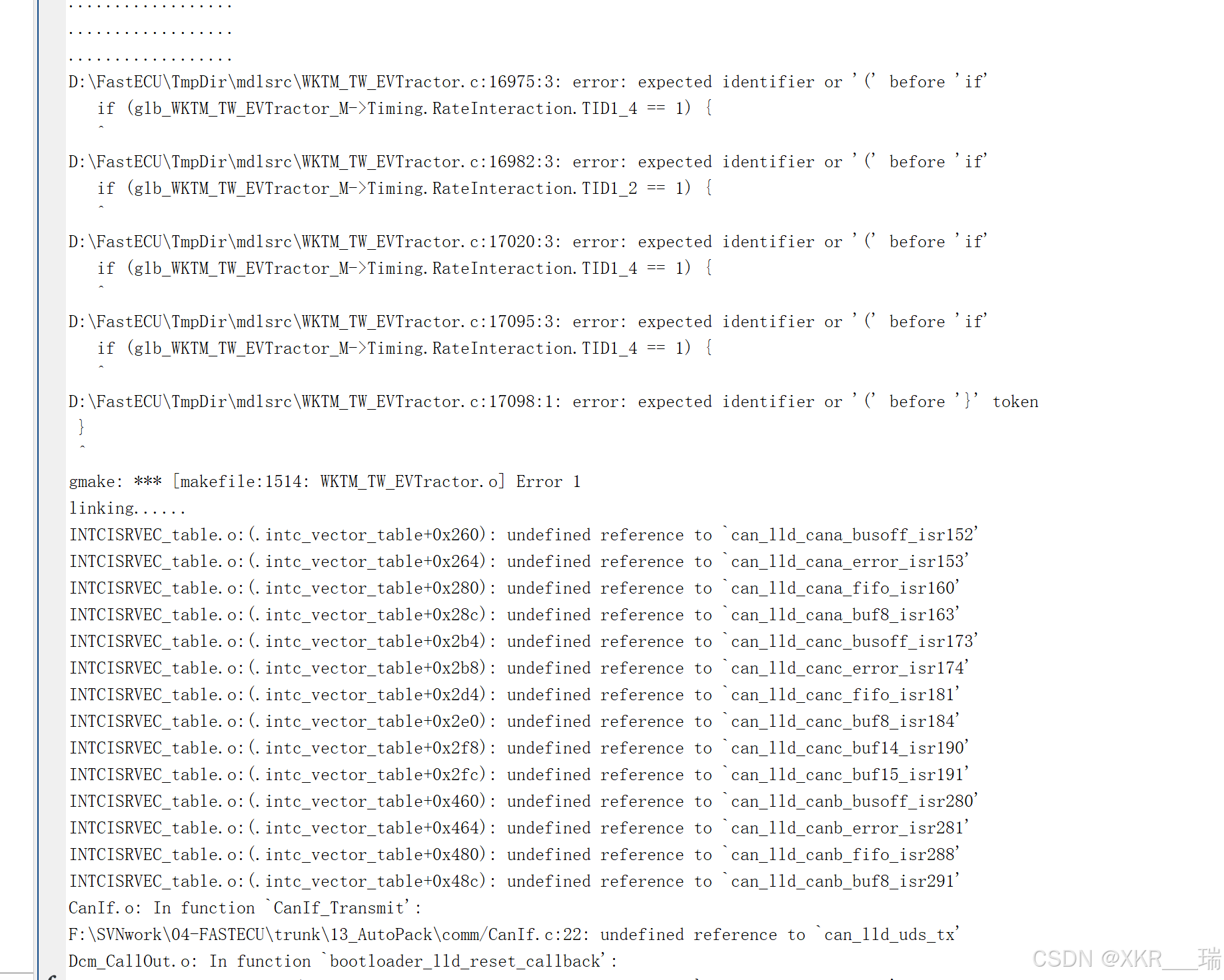
解决措施:重新创建CANTx子系统,且重新创建虚拟输出端口
记录遇到的一些错误
错误一:
原因:输入源头未定义具体的数据类型。
解决措施:定义具体的数据类型,不可选择继承
错误二:
解决措施:重新创建CANTx子系统,且重新创建虚拟输出端口
 4229
4229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























