









什么是动态规划?
动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程最优化的数学方法。20世纪50年代初美国数学家R.E.Bellman等人在研究多阶段决策过程的优化问题时,提出了著名的最优化原理,把多阶段过程转化为一系列单阶段问题,利用各阶段之间的关系,逐个求解,创立了解决这类过程优化问题的新方法——动态规划。
动态规划程序设计是对解最优化问题的一种途径、一种方法,而不是一种特殊算法。不像搜索或数值计算那样,具有一个标准的数学表达式和明确清晰的解题方法。动态规划程序设计往往是针对一种最优化问题,由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的设计方法对不同的问题,有各具特色的解题方法,而不存在一种万能的动态规划算法,可以解决各类最优化问题。
因此读者在学习时,除了要对基本概念和方法正确理解外,必须具体问题具体分析处理,以丰富的想象力去建立模型,用创造性的技巧去求解。
动态规划的分类
动态规划一般可分为线性动规,区域动规,树形动规,背包动规四类。
基本概念
多阶段决策问题
如果一类活动过程可以分为若干个互相联系的阶段,在每一个阶段都需作出决策,一个阶段的决策确定以后,常常影响到下一个阶段的决策,从而就完全确定了一个过程的活动路线,则称它为多阶段决策问题。
各个阶段的决策构成一个决策序列,称为一个策略。每一个阶段都有若干个决策可供选择,因而就有许多策略供我们选取,对应于一个策略可以确定活动的效果,这个效果可以用数量来确定。策略不同,效果也不同,多阶段决策问题,就是要在可以选择的那些策略中间,选取一个最优策略,使在预定的标准下达到最好的效果.
阶段
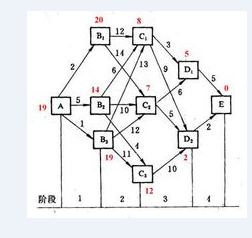
把所给求解问题的过程恰当地分成若干个相互联系的阶段,以便于求解,过程不同,阶段数就可能不同.描述阶段的变量称为阶段变量。在多数情况下,阶段变量是离散的,用k表示。在前面的例子中,第一个阶段就是点A,而第二个阶段就是点A到点B,第三个阶段是点B到点C,而第四个阶段是点C到点D, 最后一个是点D到点E。
状态
状态:状态表示每个阶段开始面临的自然状况或客观条件。在上面的例子中状态就是某阶段的出发位置,它既是该阶段某路的起点,同时又是前一阶段某支路的终点。
在前面的例子中,第一个阶段有一个状态即A,而第二个阶段有两个状态B1,B2,B3,第三个阶段是三个状态C1,C2和C3,第四个阶段的状态是D1和D2。最后一个阶段的状态是E 。
无后效性:
我们要求状态具有下面的性质:如果给定某一阶段的状态,则在这一阶段以后过程的发展不受这阶段以前各段状态的影响,所有各阶段都确定时,整个过程也就确定了。
决策
一个阶段的状态给定以后,从该状态演变到下一阶段某个状态的一种选择(行动)称为决策。在最优控制中,也称为控制。在许多问题中,决策可以自然而然地表示为一个数或一组数。不同的决策对应着不同的数值。描述决策的变量称决策变量,因状态满足无后效性,故在每个阶段选择决策时只需考虑当前的状态而无须考虑过程的历史。
给定k阶段状态变量x(k)的值后,如果这一阶段的决策变量一经确定,第k+1阶段的状态变量x(k+1)也就完全确定,即x(k+1)的值随x(k)和第k阶段的决策u(k)的值变化而变化,那么可以把这一关系看成(x(k),u(k))与x(k+1)确定的对应关系
x(k+1)=Tk(x(k),u(k))表示。这是从k阶段到k+1阶段
的状态转移规律,称为状态转移方程。
基本结构
多阶段决策问题中,各个阶段采取的决策,一般来说是与时间有关的,决策依赖于当前状态,又随即引起状态的转移,一个决策序列就是在变化的状态中产生出来的,故有“动态”的含义,称这种解决多阶段决策最优化问题的方法为动态规划方法。
基本模型
根据上例分析和动态规划的基本概念,可以得到动态规划的基本模型如下:
(1)确定问题的决策对象。
(2)对决策过程划分阶段。
(3)对各阶段确定状态变量。
(4)根据状态变量确定费用函数和目标函数。
(5)建立各阶段状态变量的转移过程,确定状态转移方程。
状态转移方程的一般形式:
一般形式: U:状态; X:策略
顺推:f[Uk]=opt{f[Uk-1]+L[Uk-1,Xk-1]} 其中, L[Uk-1,Xk-1]: 状态Uk-1通过策略Xk-1到达状态Uk 的费用
初始f[U1];结果:f[Un]。
适用条件
动态规划也并不是万能的。适用动态规划的问题必须满足最优化原理和无后效性以及子问题的重叠性。
1.最优化原理(最优子结构性质)
最优化原理可这样阐述:一个最优化策略具有这样的性质,不论过去状态和决策如何,对前面的决策所形成的状态而言,余下的诸决策必须构成最优策略。简而言之,一个最优化策略的子策略总是最优的。一个问题满足最优化原理又称其具有最优子结构性质。
2.无后效性
将各阶段按照一定的次序排列好之后,对于某个给定的阶段状态,它以前各阶段的状态无法直接影响它未来的决策,而只能通过当前的这个状态。换句话说,每个状态都是过去历史的一个完整总结。这就是无后向性,又称为无后效性。
3.子问题的重叠性
动态规划将原来具有指数级时间复杂度的搜索算法改进成了具有多项式时间复杂度的算法。其中的关键在于解决冗余,这是动态规划算法的根本目的。动态规划实质上是一种以空间换时间的技术,它在实现的过程中,不得不存储产生过程中的各种状态,所以它的空间复杂度要大于其它的算法。















 460
460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









