







2.图像中关键点提取和pcl中点云的关键点提取
2.1二维图像的Harris角点提取
经典的Harris角点提取方法实质上就是对Moravec算子的改良和优化。从图像分析的角度来定义角点可以有以下两种定义:
a.角点可以是两个边缘的的角点;
b.角点是邻域内具有两个主方向的特征点;
Harris角点检测原理主要参考:Harris角点提取和Harris角点检测原理
Harris角点检测使用了图像窗口模板在待检测图像上在各个方向上平移,从而探测角点,图像窗口为:[u,v],产生灰度变化的自相关函数如下:

其中:w(u,v)是窗口函数,I(∆x+u,∆y+v)为平移后的灰度图像,I(u,v)为灰度图像。
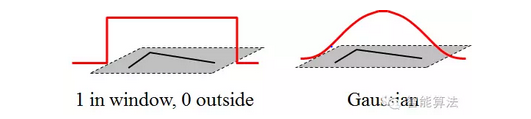
窗口函数(权重矩阵)可以是平坦的,也可以是高斯的(通常为高斯滤波器)如下图:

二次项函数本质上是一个椭圆函数,椭圆的长半径和短半径由λ_1 、λ_2(即特征值)决定的,方向由M(x,y)的特征向量决定,椭圆方程为:[∆x,∆y]M(x,y)[(∆x,∆y)]T=1,(T表示转置)椭圆示意图如下:
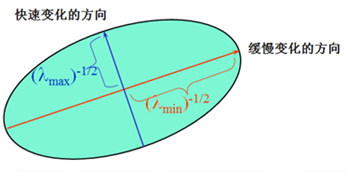
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如下图所示。共可分为三种情况:

a.一个特征值大,另一个特征值小,自相关函数值在某一方向上大,在其他方向上小,则表示检测到边;
b.两个特征值都小,且近似相等;自相关函数数值在各个方向上都小,则表示检测到图像中的平面(平坦部分);
c.两个特征值都大,且近似相等,自相关函数在所有方向都增大。表示检测到了角点。
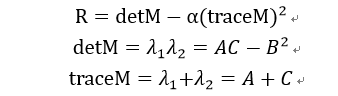
二次项函数可以求得特征值,但是Harris方法不必计算具体的特征值,而是计算角点响应值R来判断角点。R的计算公式为:
Harris角点检测实现步骤大致如下:
1.计算图像I(x,y)在X和Y两个方向的梯度Ix 、Iy;
2.计算图像两个方向的梯度乘积;
3.使用高斯函数对
进行高斯加权,生成矩阵M的元素A、B和C;
4.计算每个像素的Harris响应值R,并对小于某一阈值t的R置为0;
5.在3X3或5X5的邻域内进行非极大值抑制,局部最大值即为图像的角点
Harris角点检测特点:
a.增大α的值,将减小角点响应值R,降低角点检测的灵敏性,减少被检测角点数量,减小α值,将增大角点响应值R,增加角点检测的灵敏性,增加被检测角点数量;
b.Harris角点检测对亮度和对比度的变化不敏感;
c.Harris角点检测具有旋转不变性;
d.Harris角点检测具有尺度不变性
2.2Harris角点实例分析:
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include "opencv2/imgproc/types_c.h"
using namespace cv;
using namespace std;
Mat image;
Mat imageGray;
int thresh = 200;
int MaxThresh = 255;
void Trackbar(int, void*); //阈值控制
int main()
{
image = imread("rectified.JPG");
cvtColor(image, imageGray, CV_RGB2GRAY);
GaussianBlur(imageGray, imageGray, Size(5, 5), 1); // 滤波
namedWindow("Corner Detected", WINDOW_NORMAL);
createTrackbar("threshold:", "Corner Detected", &thresh, MaxThresh, Trackbar);
imshow("Corner Detected", image);
Trackbar(0, 0);
waitKey();
return 0;
}
void Trackbar(int, void*)
{
Mat dst, dst8u, dstshow, imageSource;
dst = Mat::zeros(image.size(), CV_32FC1);
imageSource = image.clone();
cornerHarris(imageGray, dst, 3, 3, 0.04, BORDER_DEFAULT);
normalize(dst, dst8u, 0, 255, CV_MINMAX); //归一化
convertScaleAbs(dst8u, dstshow);
imshow("dst", dstshow); //dst显示
for (int i = 0; i < image.rows; i++)
{
for (int j = 0; j < image.cols; j++)
{
if (dstshow.at<uchar>(i, j) > thresh) //阈值判断,大于设定的阈值则显示出角点
{
circle(imageSource, Point(j, i), 2, Scalar(0, 0, 255), 2); //标注角点
}
}
}
imshow("Corner Detected", imageSource);
}
角点显示如下,可以鼠标拖动滑动块显示出不同的阈值下的角点数量
thresh=200时:

thresh=149时:

2.3点云的关键点提取
3DHarris点云关键点提取借鉴了二维图像的关键点提取思想,不过3DHarris关键点检测使用的是点云表面法向量的信息,这区别于2DHarris角点检测使用的图像梯度信息。
3DHarris角点提取步骤:
- 求解离散点云的法线,构造法线协方差矩阵,法线协方差矩阵如下:
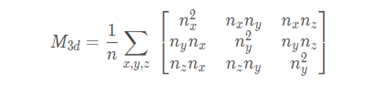
式中n为当前点邻域点个数。
2. 根据角点响应函数计算点云中每个点的角点响应值,计算公式为:

3. 根据角点响应阈值判断当前点是否为角点,若R3d大于给定的阈值,同时为局部极大值点则判定该点为角点,否则不是角点。
注意:Harris输出的点云必须有强度信息(I)的pcl::PointXYZI,因为评估值保存在(I)里面,因此后续关键点的保存和可视化中不能直接使用Harris输出的pcl::PointXYZI格式点云,需要通过关键点的索引从原始点云中重新获取。
点云Harris角点信息提取代码实现如下:
主要参考:郭浩,苏伟,朱德海,王可.点云库pcl从入门到精通「M」.北京:机械工业出版社,2019:182-190
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/keypoints/harris_3d.h>
#include <boost/thread/thread.hpp>
#include <stdlib.h>
#include <iostream>
using namespace std;
using namespace std;
int main(int argc, char** argv)
{
// 创建点云对象指针
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile<pcl::PointXYZ>("rabbit.pcd", *cloud);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud1");
//harris detect
pcl::HarrisKeypoint3D<pcl::PointXYZ, pcl::PointXYZI, pcl::Normal> harris;
harris.setInputCloud(cloud);//设置输入点云 指针
harris.setNonMaxSupression(true);
harris.setRadius(0.6f);// 块体半径
harris.setThreshold(0.01f);//数量阈值
//新建的点云必须初始化,清零,否则指针会越界
//注意Harris的输出点云必须是有强度(I)信息的 pcl::PointXYZI,因为评估值保存在I分量里
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_out_ptr(new pcl::PointCloud<pcl::PointXYZI>);
// 计算特征点
harris.compute(*cloud_out_ptr);
// 关键点
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_harris_ptr(new pcl::PointCloud<pcl::PointXYZ>);
int size = cloud_out_ptr->size();
pcl::PointXYZ point;
//可视化结果不支持XYZI格式点云,所有又要导回XYZ格式。。。。
for (int i = 0; i < size; ++i)
{
point.x = cloud_out_ptr->at(i).x;
point.y = cloud_out_ptr->at(i).y;
point.z = cloud_out_ptr->at(i).z;
cloud_harris_ptr->push_back(point);
}
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> harris_color_handler(cloud_harris_ptr, 0, 255, 0);//第一个参数类型为 指针
viewer->addPointCloud<pcl::PointXYZ>(cloud_harris_ptr, harris_color_handler, "harris");//第一个参数类型为 指针
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 5, "harris");
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
}
system("pause");
return 0;
}
总结:它的参数设置主要在设定搜索半径和阈值上面.
显示效果如图:

注:3D点云的关键提取算子除了有3DHarris还有3DSIFT、NARF(Normal Aligned Radial Feature)中文名:法向对准径向特征,这些算子仍然使用的是点云的法向量信息。














 5945
5945











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









