






GYM雅达利打砖块环境安装
前情提要
又装了一整天的环境,一开始装gym环境只用了
pip install gym
但是这个命令只能安装一些基础的游戏环境
自带就有一些基本的小游戏(或者称之为环境),包括classical control,box2d,mujoco,toytext等类别的一些小游戏,具体游戏名可以去…\Lib\site-packages\gym\envs下相应的文件夹下查看,或者去…\Lib\site-packages\gym\envs\registration.py文件内查看
我要使用的“BreakoutNoFrameskip-v4”打砖块环境并不在,然后为了安装还出了还出现了很多的bug,改来改去bug越来越多,还发现自己之前手贱删了一些dll链接文件,导致包之间的依赖关系被破坏。
如果你安装失败并且尝试了很多方法依然不成功,那么可以用我下面的方法来安装。
卸载之前安装的GYM
pip uninstall atari-py
pip uninstall gym[atari]
下载 VS build tools
https://visualstudio.microsoft.com/thank-you-downloading-visual-studio/?sku=BuildTools&rel=16
运行 VS build tools并安装以下工具
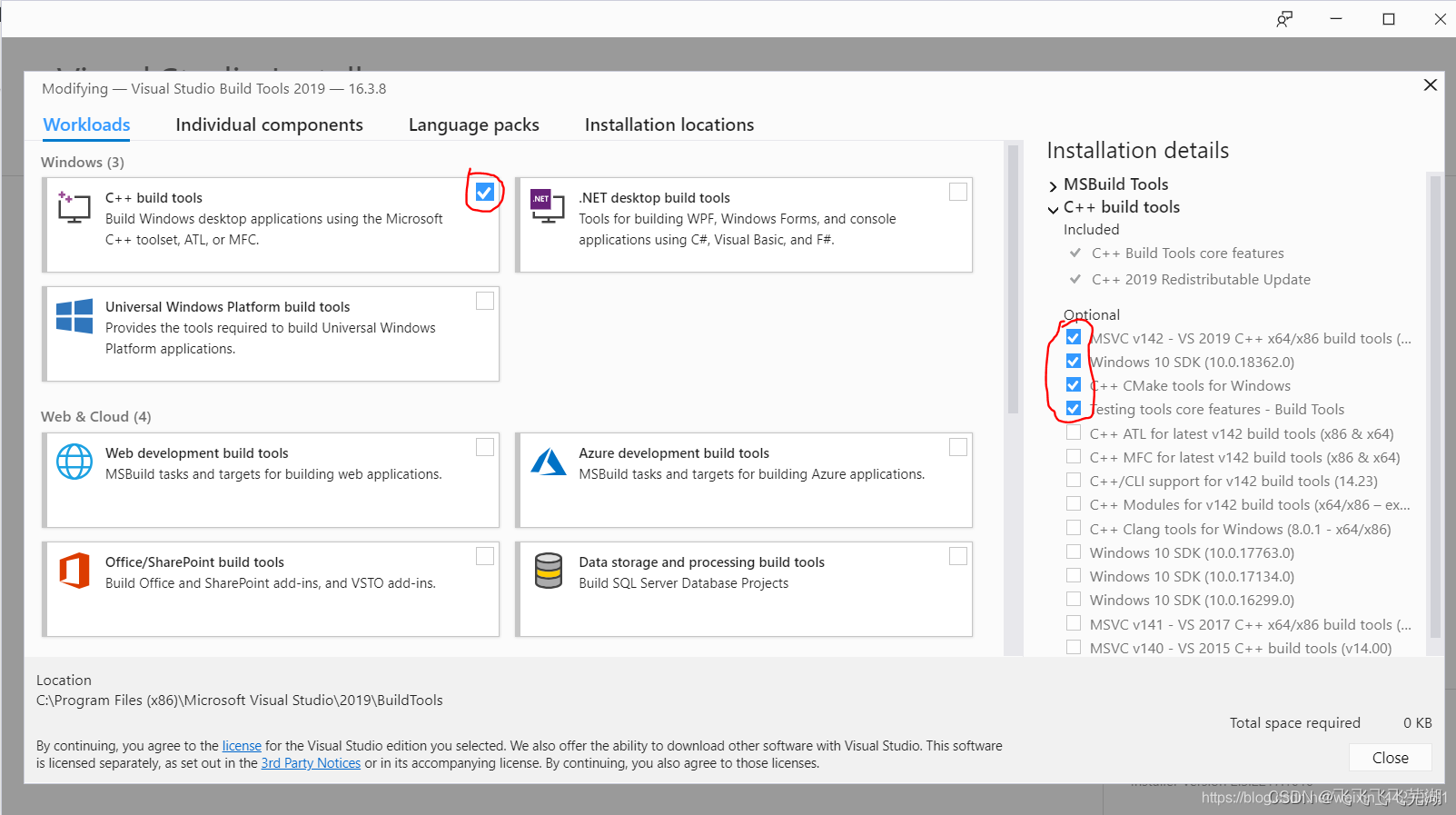
重启电脑
根据安装提示重启电脑
安装cmake, atari-py 和 gym
pip install cmake
pip install atari-py
pip install gym[atari]
测试
import atari_py
print(atari_py.list_games())
输出结果:
[‘adventure’, ‘air_raid’, ‘alien’, ‘amidar’, ‘assault’, ‘asterix’, ‘asteroids’, ‘atlantis’, ‘bank_heist’, ‘battle_zone’, ‘beam_rider’, ‘berzerk’, ‘bowling’, ‘boxing’, ‘breakout’, ‘carnival’, ‘centipede’, ‘chopper_command’, ‘crazy_climber’, ‘defender’, ‘demon_attack’, ‘double_dunk’, ‘elevator_action’, ‘enduro’, ‘fishing_derby’, ‘freeway’, ‘frostbite’, ‘gopher’, ‘gravitar’, ‘hero’, ‘ice_hockey’, ‘jamesbond’, ‘journey_escape’, ‘kaboom’, ‘kangaroo’, ‘krull’, ‘kung_fu_master’, ‘montezuma_revenge’, ‘ms_pacman’, ‘name_this_game’, ‘phoenix’, ‘pitfall’, ‘pong’, ‘pooyan’, ‘private_eye’, ‘qbert’, ‘riverraid’, ‘road_runner’, ‘robotank’, ‘seaquest’, ‘skiing’, ‘solaris’, ‘space_invaders’, ‘star_gunner’, ‘tennis’, ‘time_pilot’, ‘tutankham’, ‘up_n_down’, ‘venture’, ‘video_pinball’, ‘wizard_of_wor’, ‘yars_revenge’, ‘zaxxon’]
若问题还没得到解决
可能是你的gym和atari版本有问题,回退到之前的版本
pip install gym==0.19.0
pip install atari_py==0.2.6
以上,问题得到解决。

















 7446
7446

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









