







 本文为《视觉SLAM十四讲 第二版》第七讲的读书笔记,主要探讨基于特征点的视觉里程计算法,包括特征点提取、匹配、2D-2D对极几何、3D-2D PnP、3D-2D ICP等问题。实践中使用OpenCV实现特征点提取和匹配,通过实验数据展示ORB特征点的提取和匹配速度。课后习题涉及特征点类型、优化方法、避免误匹配策略等。
本文为《视觉SLAM十四讲 第二版》第七讲的读书笔记,主要探讨基于特征点的视觉里程计算法,包括特征点提取、匹配、2D-2D对极几何、3D-2D PnP、3D-2D ICP等问题。实践中使用OpenCV实现特征点提取和匹配,通过实验数据展示ORB特征点的提取和匹配速度。课后习题涉及特征点类型、优化方法、避免误匹配策略等。
读书笔记:视觉里程计1
之前的内容,介绍了运动方程和观测方程的具体形式,并讲解了以非线性优化为主的求解方法。从本讲开始,我们结束了基础知识的铺垫,开始步入正题:按照第二讲的内容,分别介绍视觉里程计、优化后端、回环检测和地图构建四个模块。本讲和下一讲主要介绍作为视觉里程计的主要理论,然后在第九章中进行一次实践。本讲关注基于特征点方式的视觉里程计算法。我们将介绍什么是特征点,如何提取和匹配特征点,以及如何根据配对的特征点估计相机运动。
特征点法
- 经典SLAM模型中以位姿——路标(Landmark)来描述SLAM过程
- 路标是三维空间中固定不变的点,能够在特定位姿下观测到
- 数量充足,以实现良好的定位
- 较好的区分性,以实现数据关联
- 在视觉SLAM中,可利用图像特征点作为SLAM中的路标
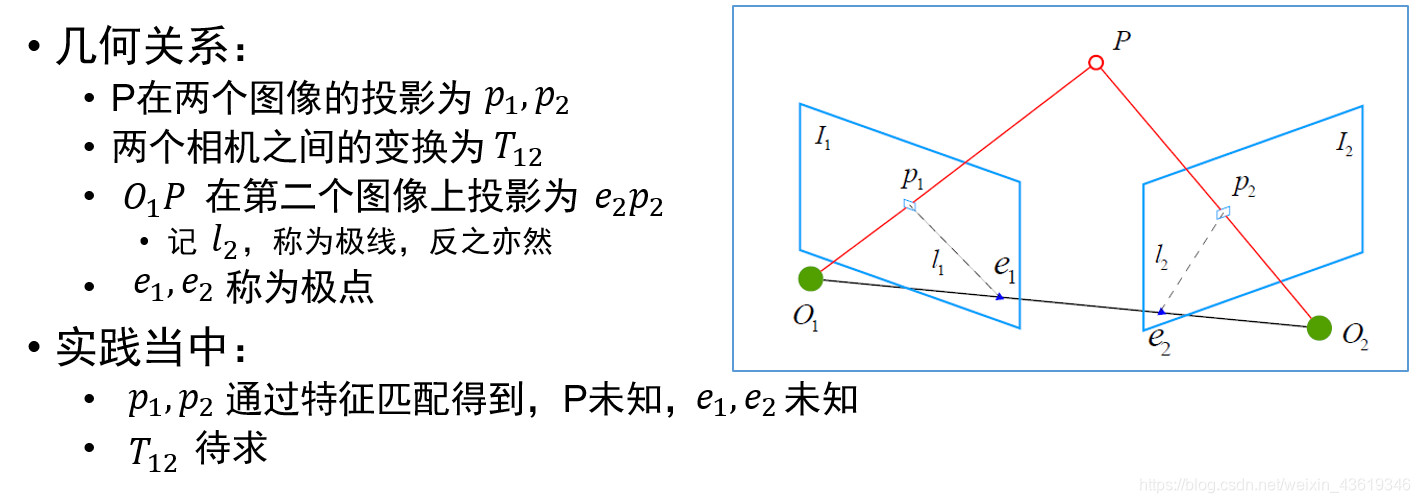
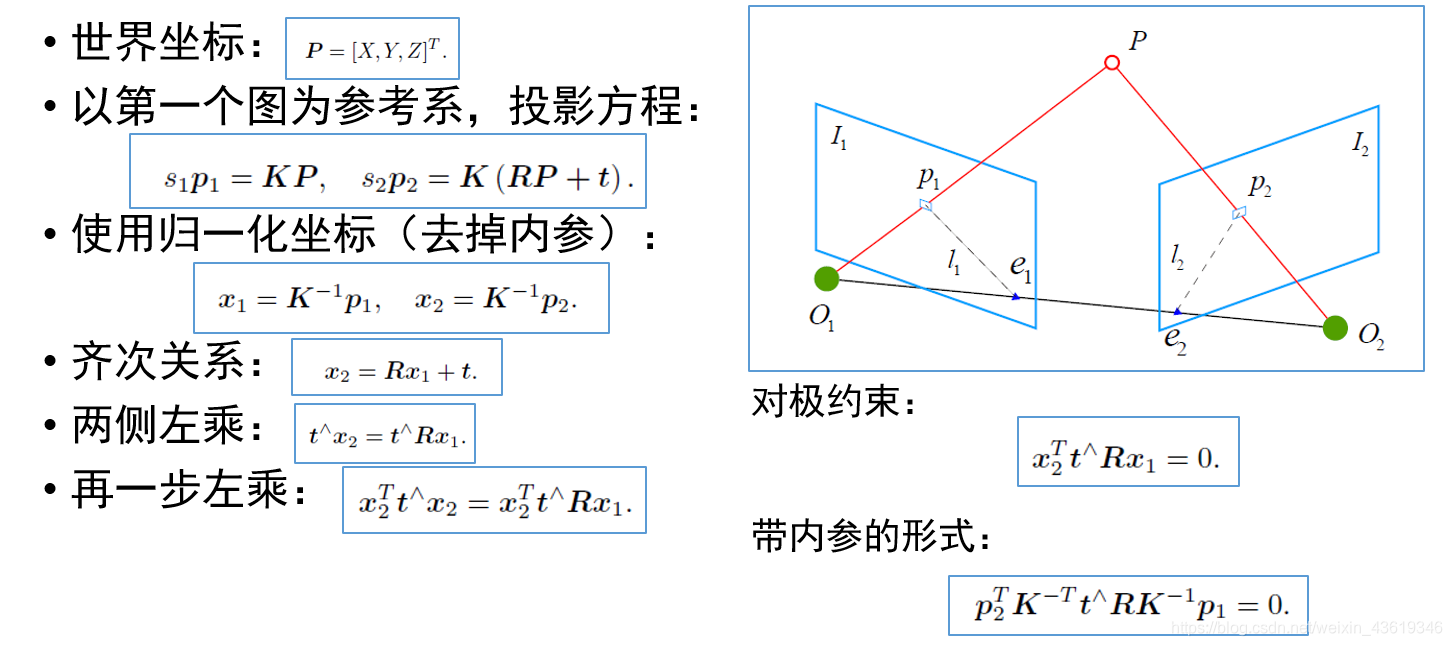
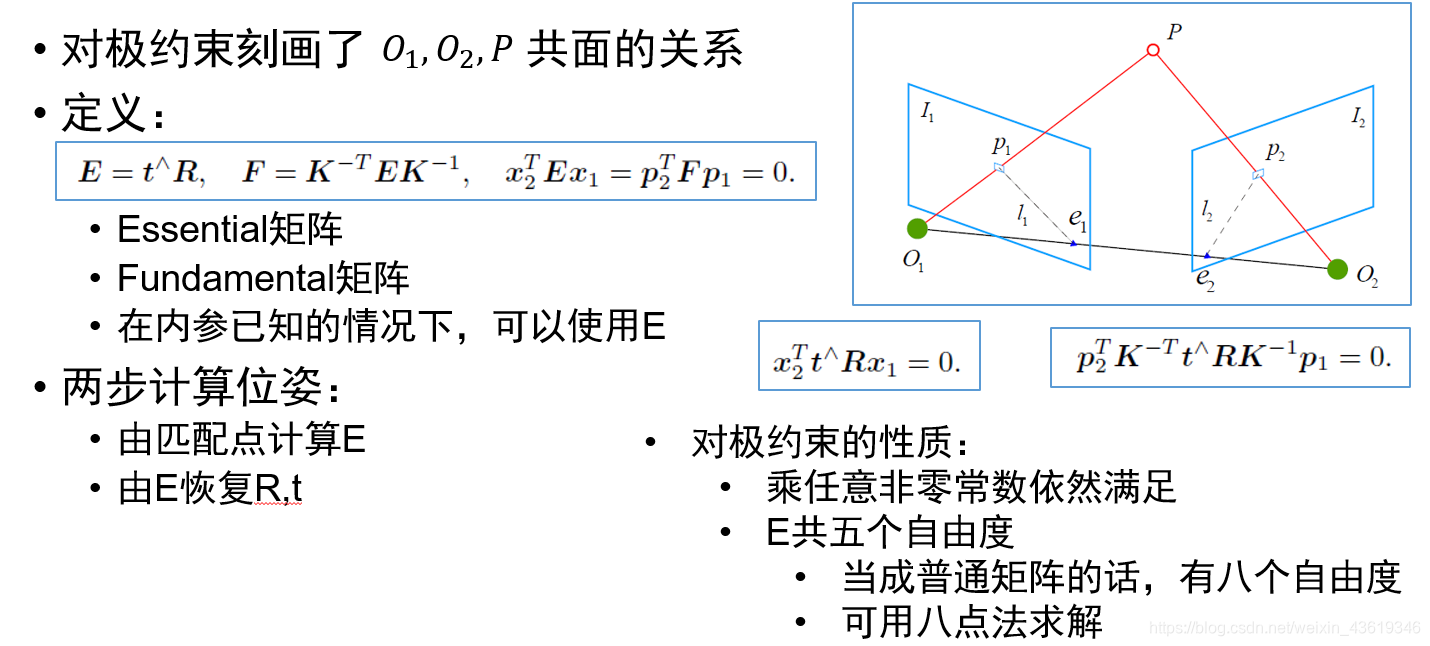
2D-2D: 对极几何
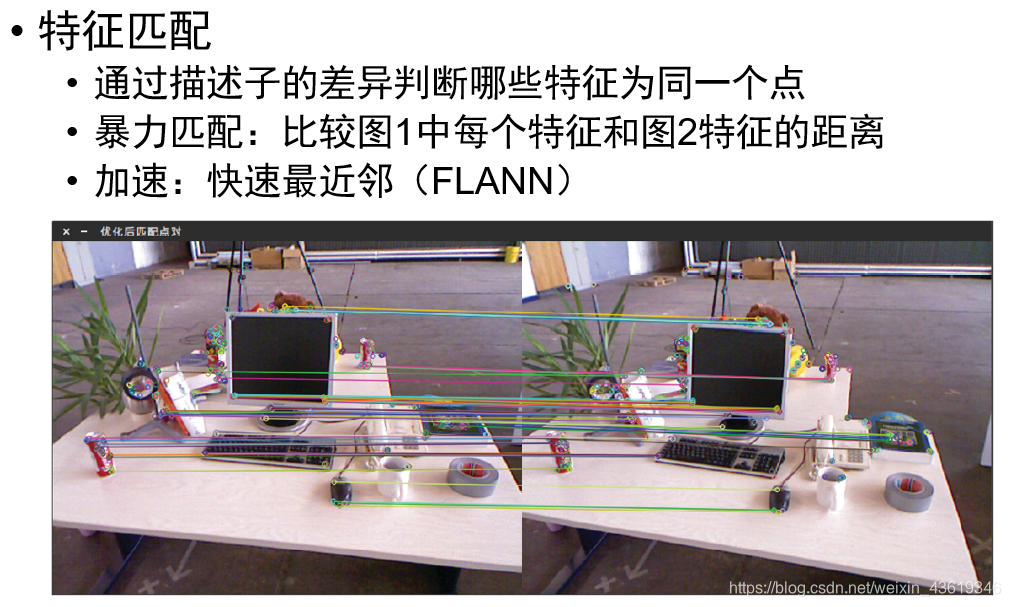
特征匹配之后,得到了特征点之间的对应关系:
- 如果只有两个单目图像,得到2D-2D间的关系 ——对极几何
- 如果匹配的是帧和地图,得到3D-2D间的关系 ——PnP
- 如果匹配的是RGB-D图,得到3D-3D间的关系 ——ICP
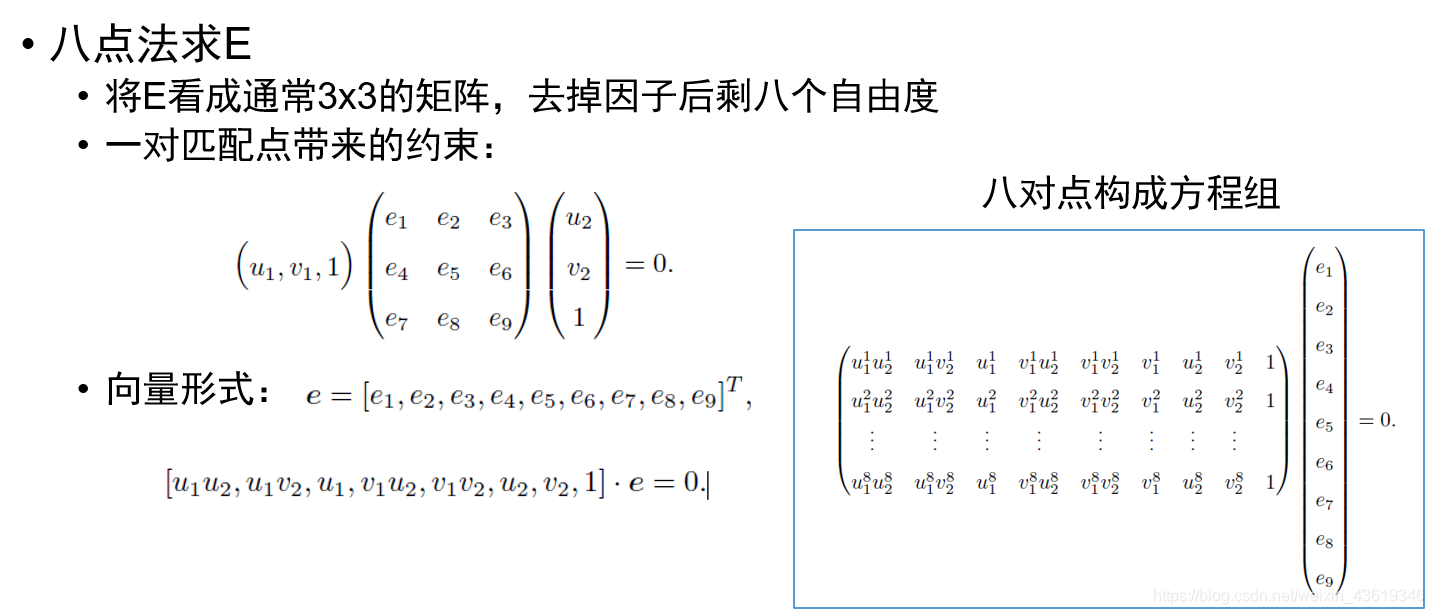
八点法的讨论: - 尺度不确定性:归一化 t 或特征点的平均深度
- 纯旋转问题:t=0 时无法求解
- 多于八对点时:最小二乘
- 有外点时:RANSAC
小结:
- 2D-2D情况下,只知道图像坐标之间的对应关系
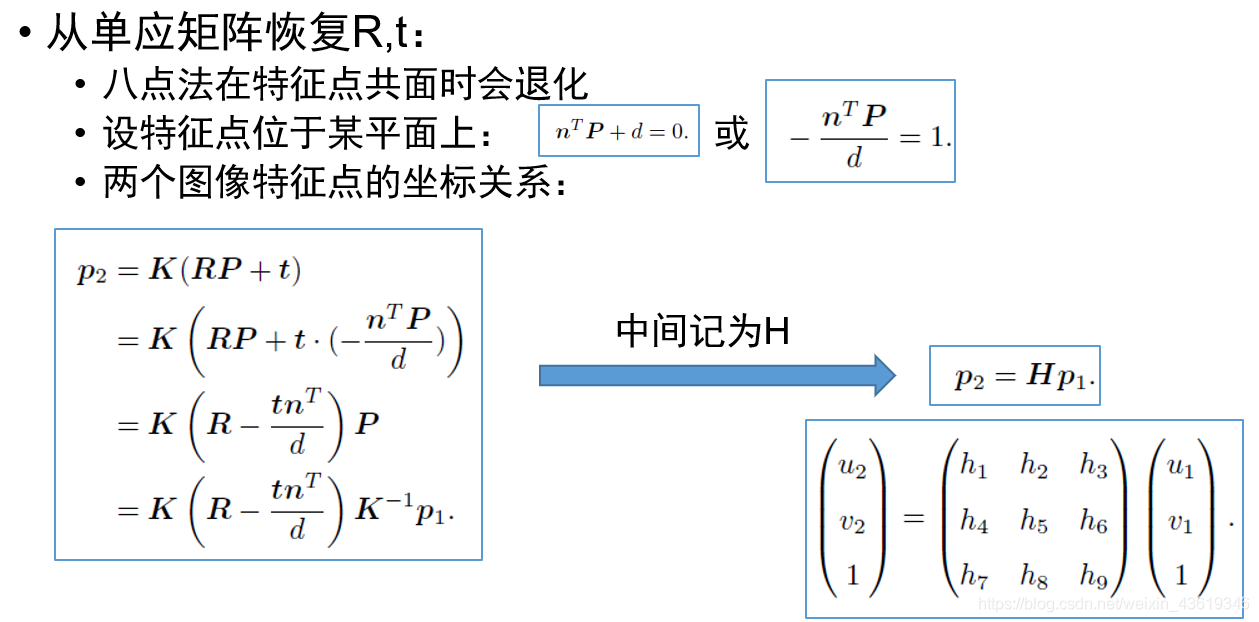
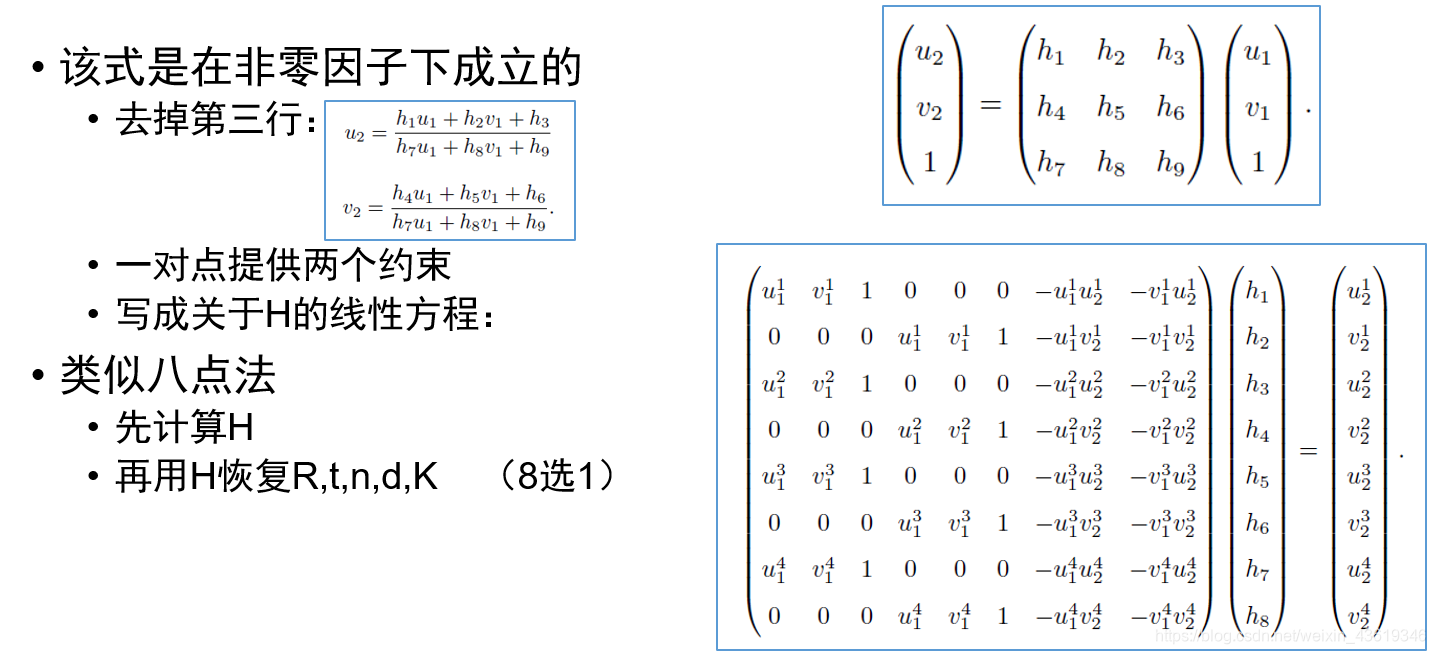
- 当特征点在平面上时(例如俯视或仰视),使用H恢复R,t
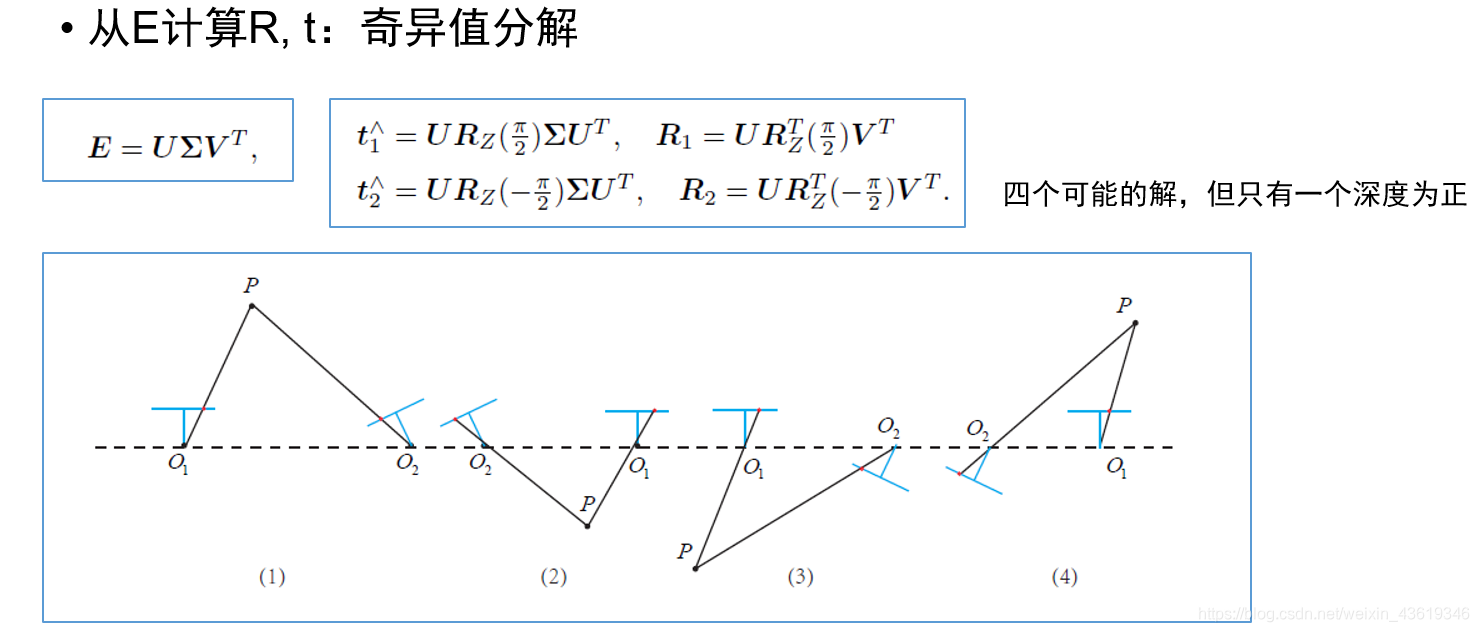
- 否则,使用E或F恢复R,t
- t 没有尺度
- 求得R,t后:
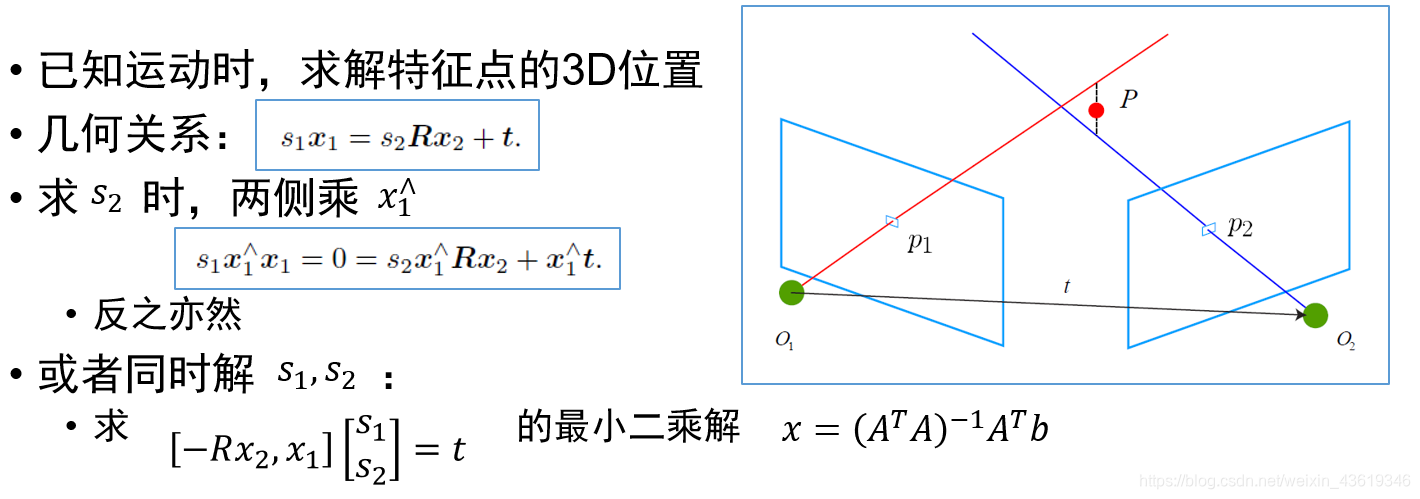
- 利用三角化计算特征点的3D位置(即深度)
- 实际中用于单目SLAM的初始化部分
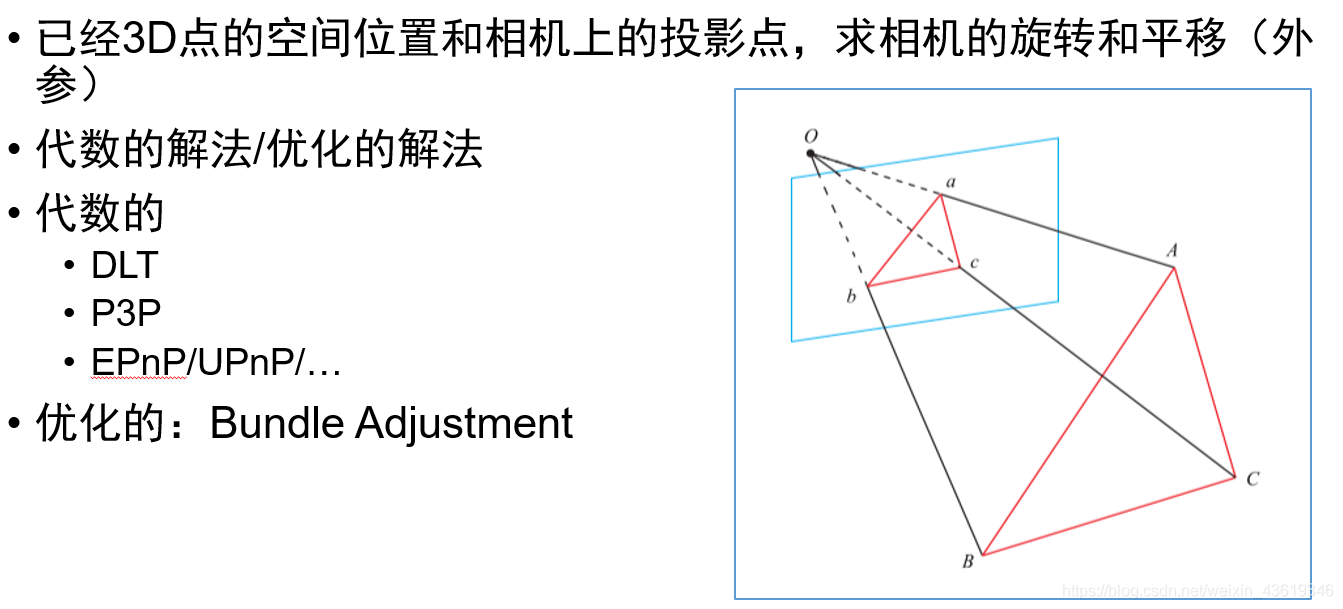
3D-2D PnP

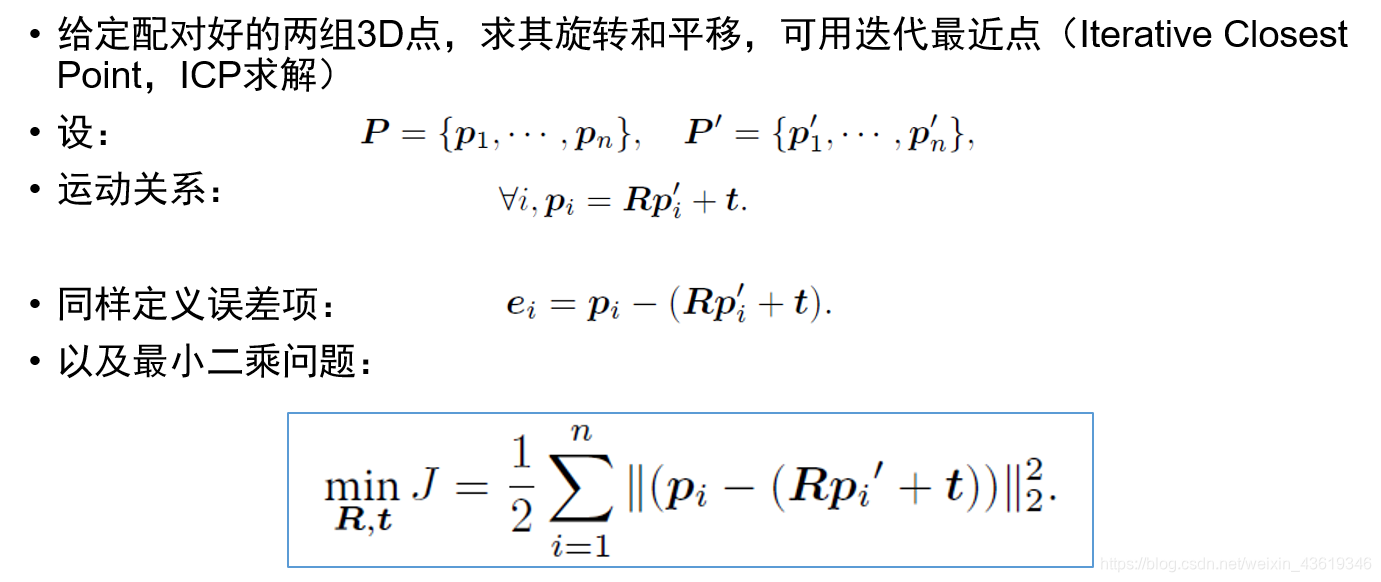
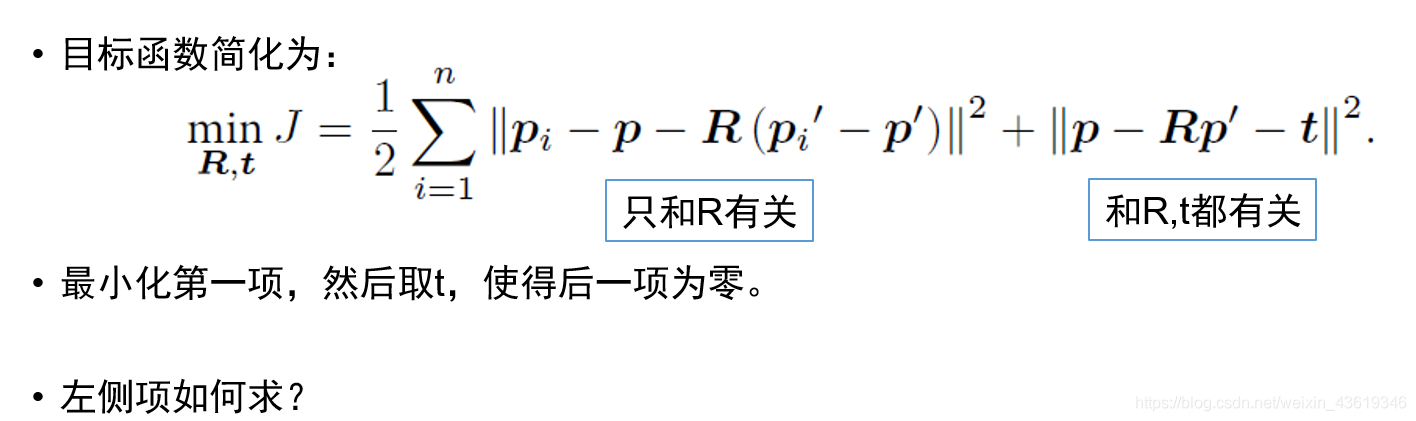
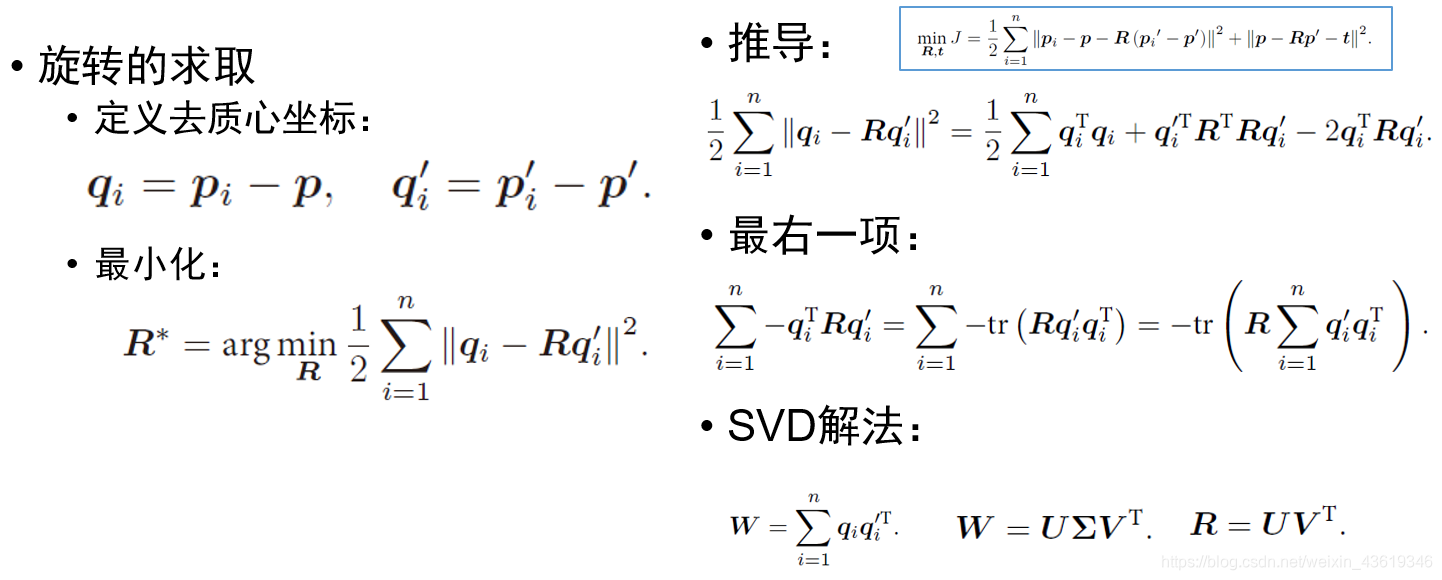
3D-2D ICP
三角化与深度估计
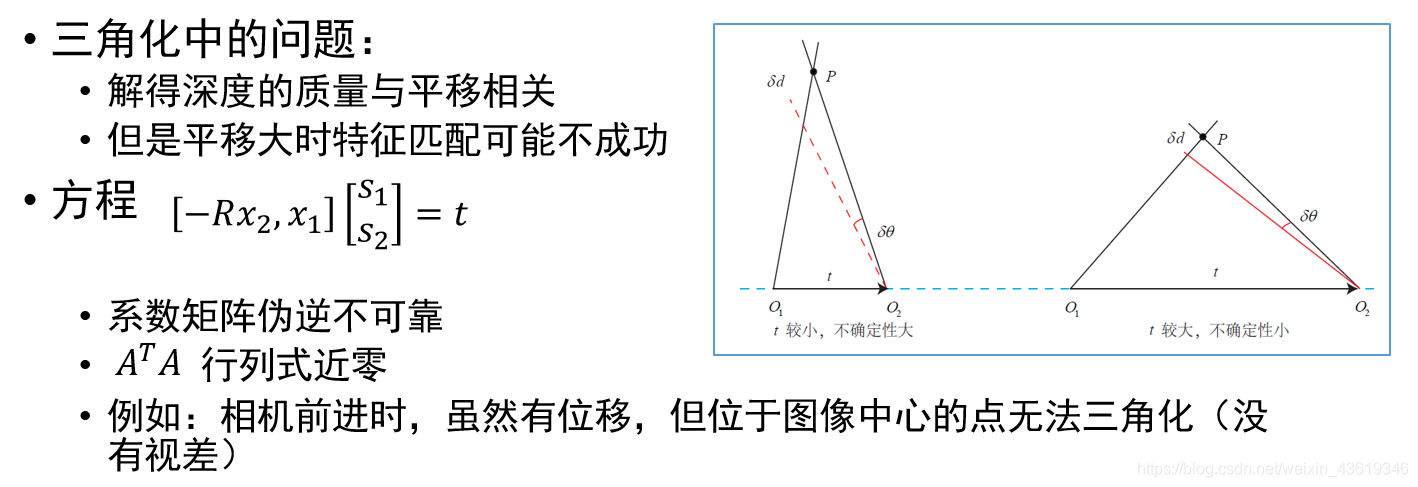
小结:
本节介绍了基于特征点的视觉里程计中的几个重要的问题。包括:
- 特征点是如何提取并匹配的;
- 如何通过2D-2D 的特征点估计相机运动;
- 如何从2D-2D 的匹配估计一个点的空间位置;
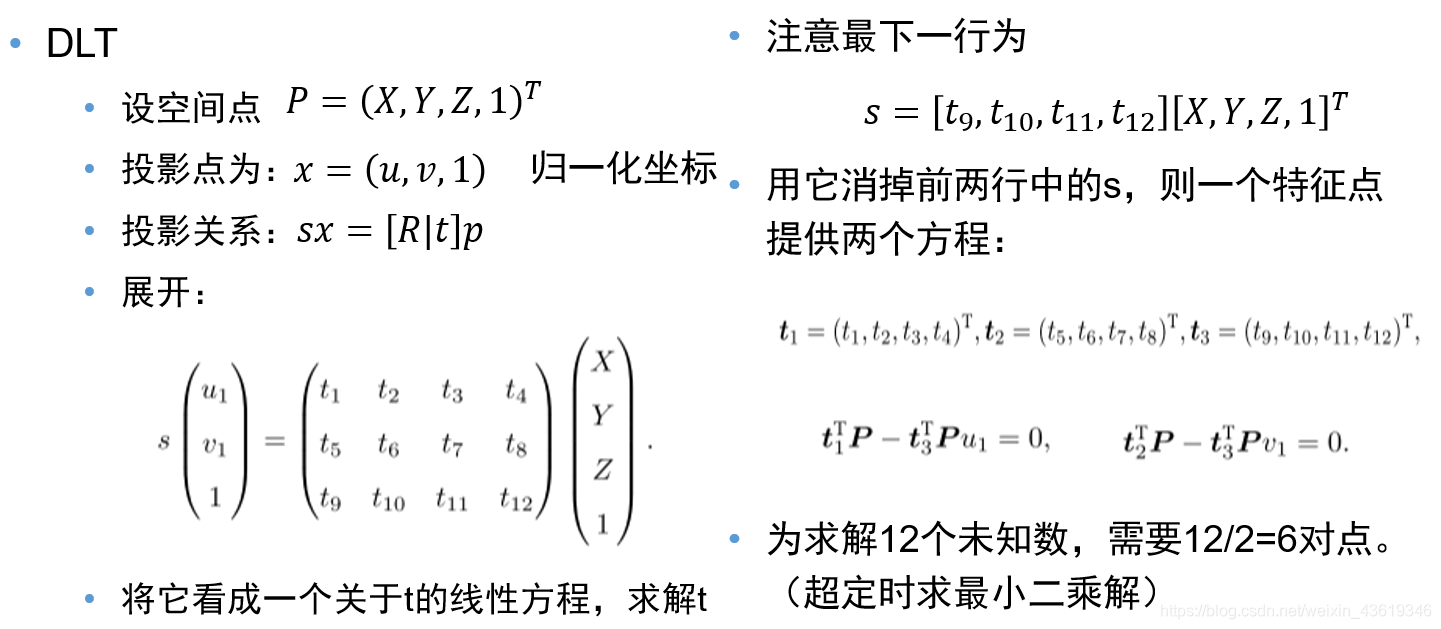
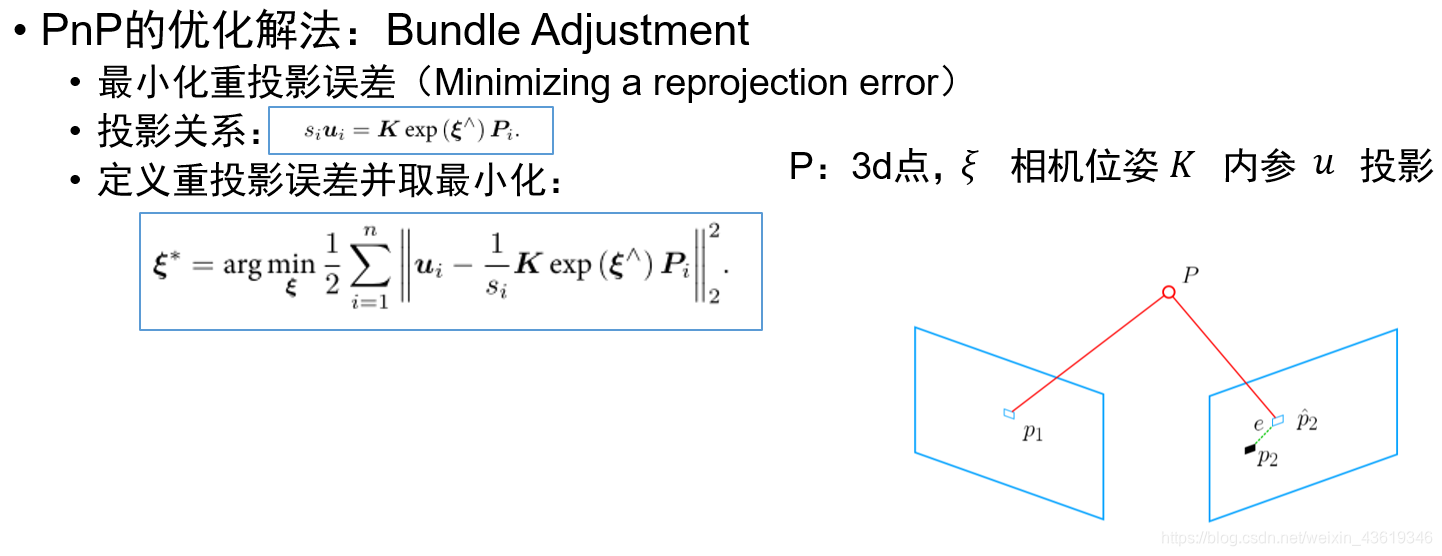
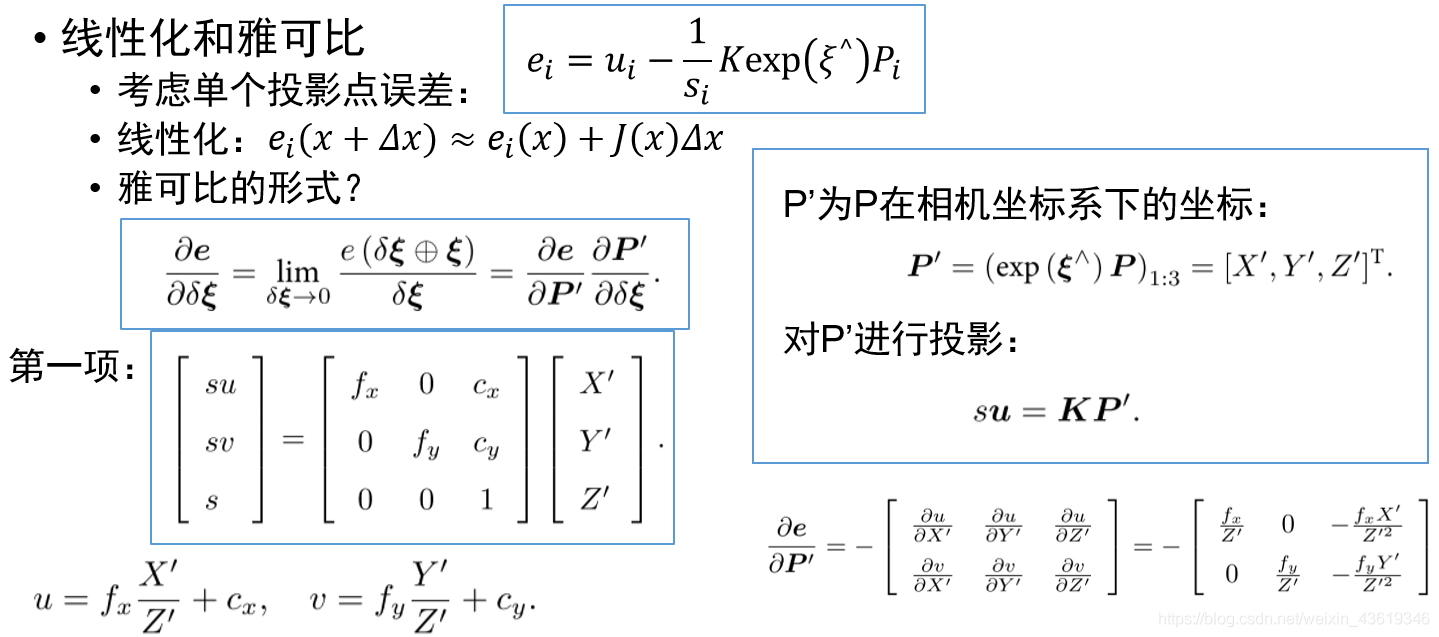
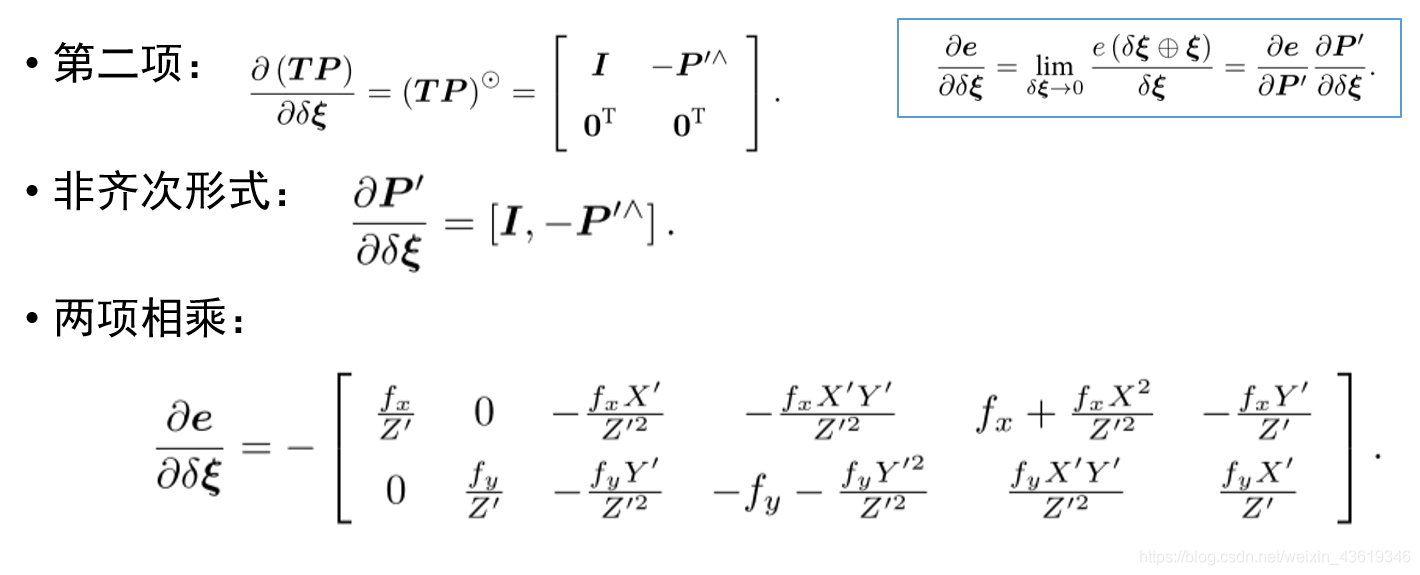
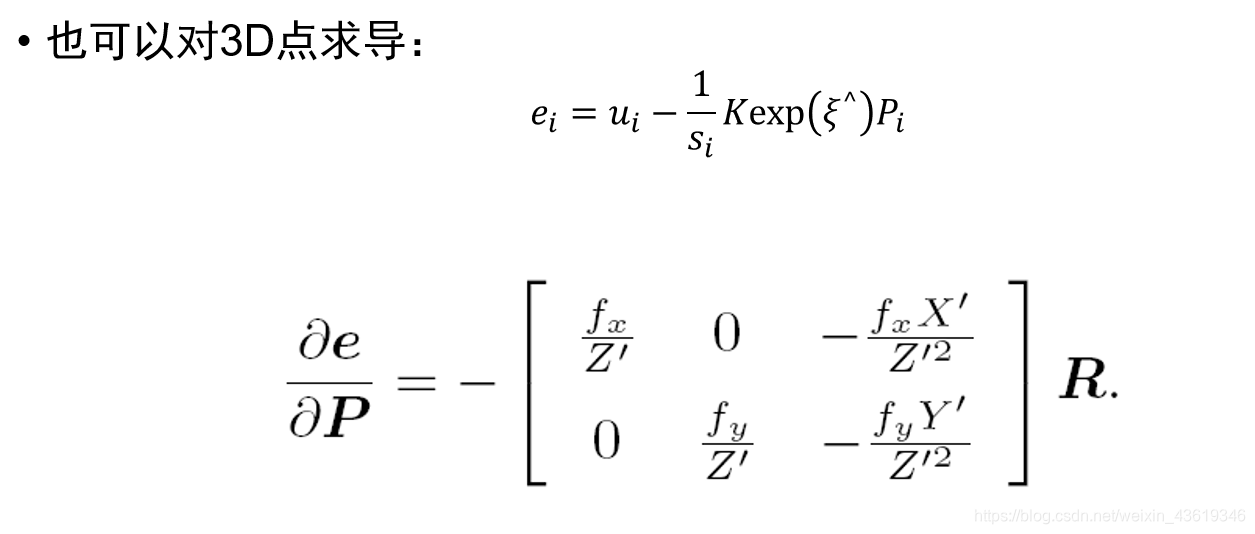
- 3D-2D 的PnP 问题,它的线性解法和Bundle Adjustment 解法;
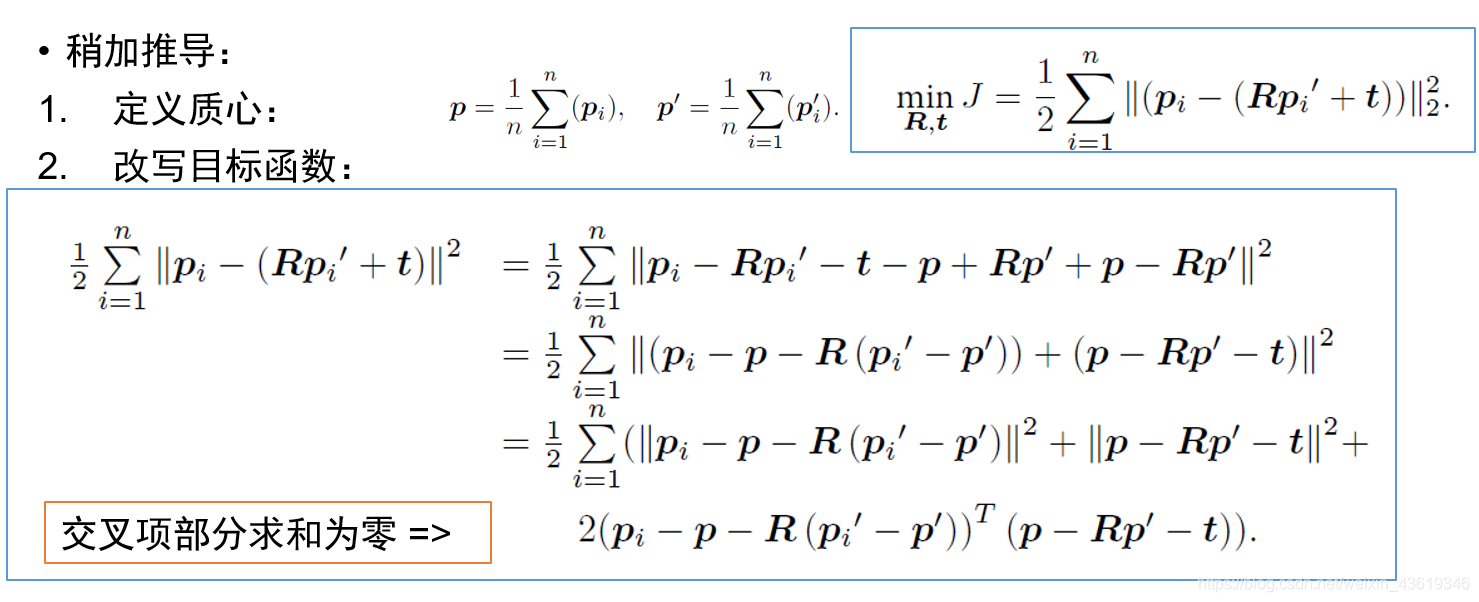
- 3D-3D 的ICP 问题,其线性解法和Bundle Adjustment 解法。
实践部分
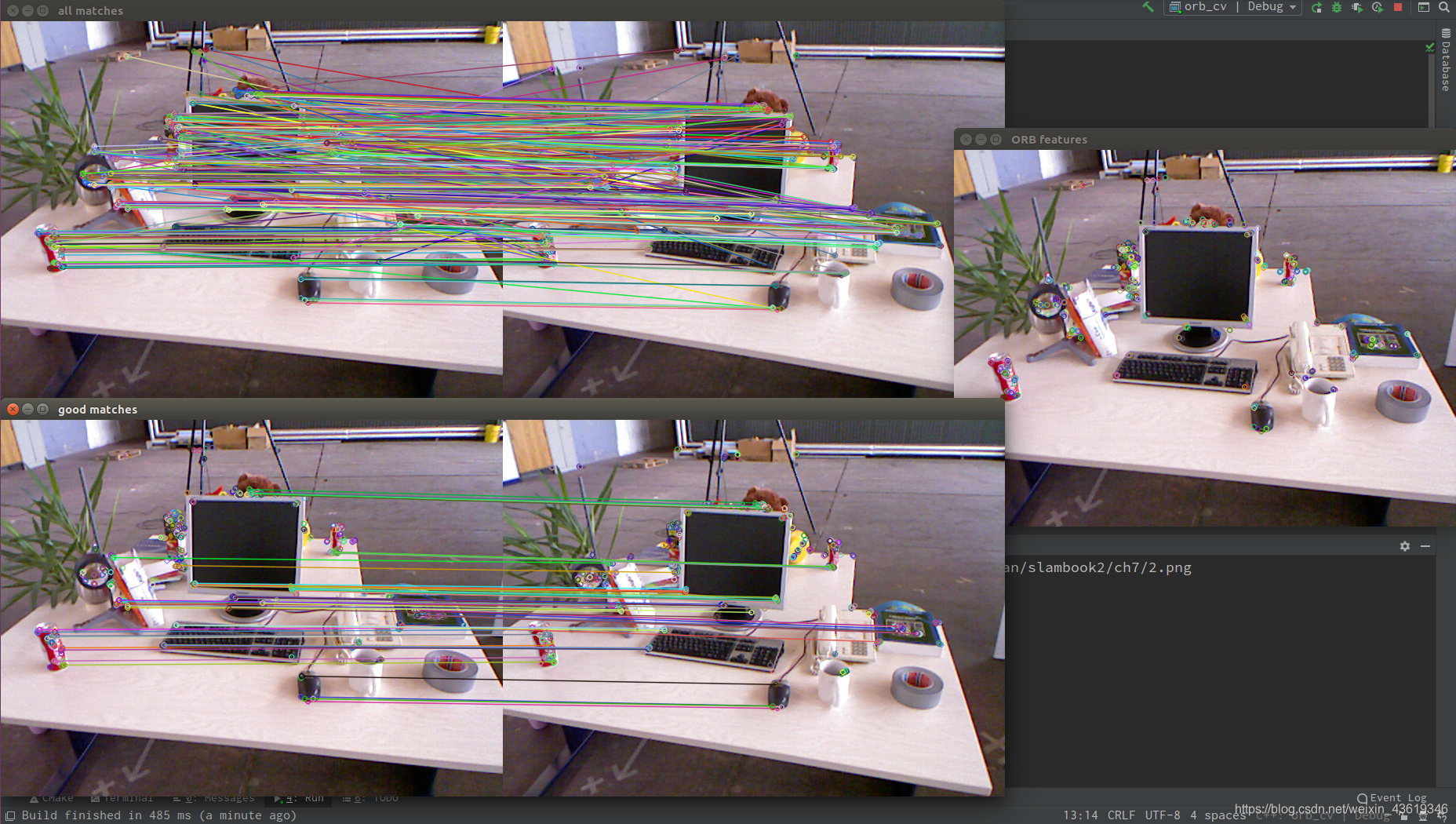
orb_cv:
和之前几章一样,导入相应的图片参数后运行代码即可:
/home/wh/shenlan/slambook2/ch7/cmake-build-debug/orb_cv /home/wh/shenlan/slambook2/ch7/1.png /home/wh/shenlan/slambook2/ch7/2.png
extract ORB cost = 0.222814 seconds.
match ORB cost = 0.000989399 seconds.
-- Max dist : 95.000000
-- Min dist : 7.000000
orb_self:
需要注意一下配置文件(通过之前的各种错误调试,对这个已经驾轻就熟了(逃 ):
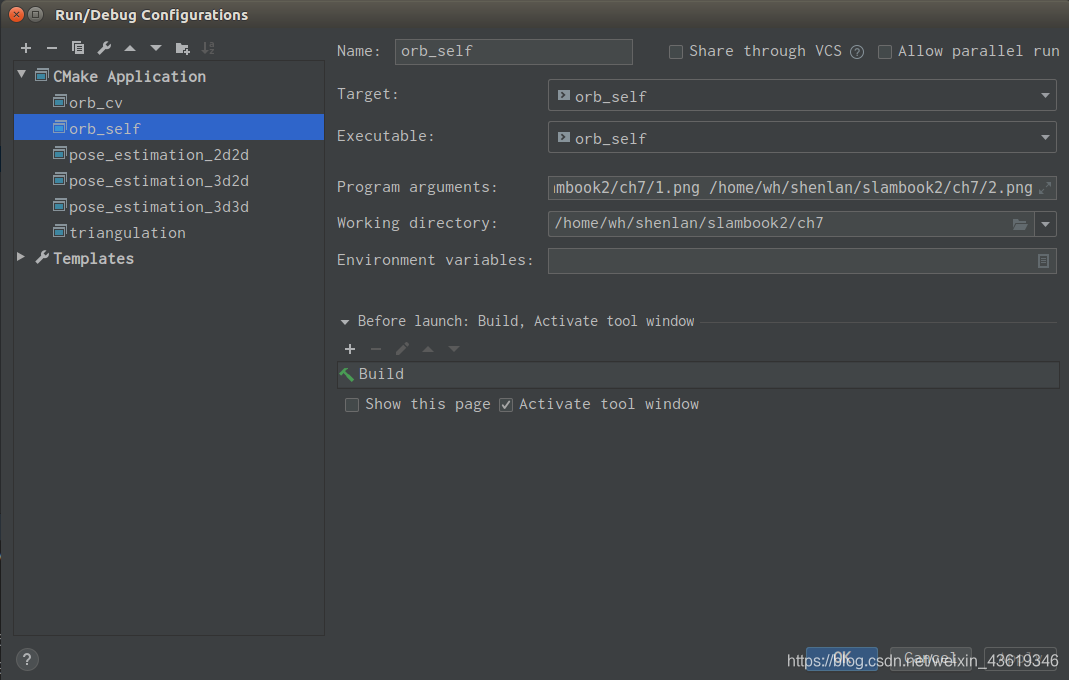
运行后结果为:
/home/wh/shenlan/slambook2/ch7/cmake-build-debug/orb_self /home/wh/shenlan/slambook2/ch7/1.png /home/wh/shenlan/slambook2/ch7/2.png
bad/total: 43/638
bad/total: 8/595
extract ORB cost = 0.00240357 seconds.
match ORB cost = 0.000984295 seconds.
matches: 51
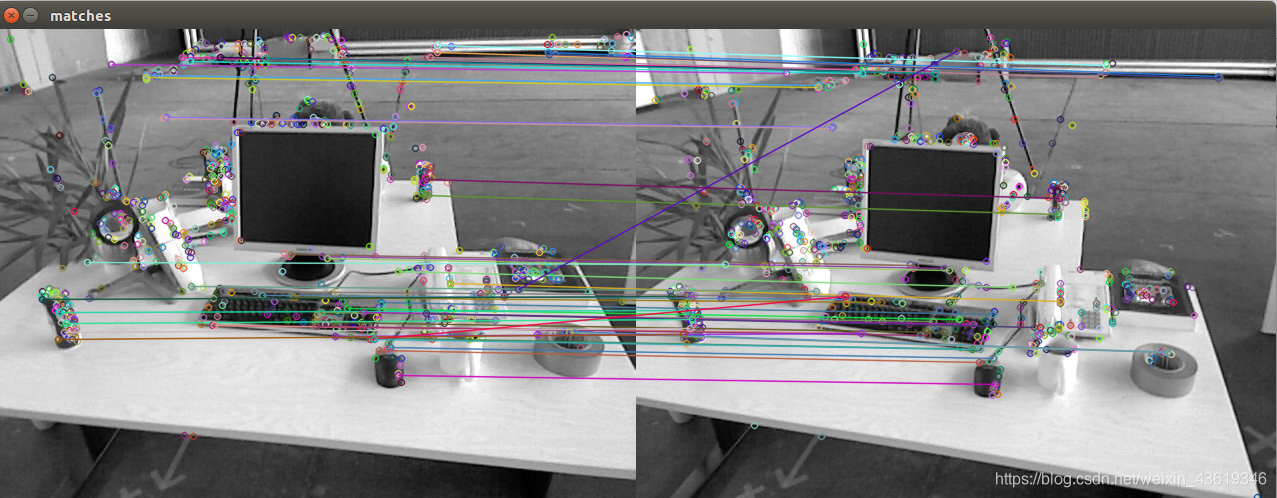
可见,这个程序中,ORB的提取只要2.4毫秒,匹配只需要0.98毫秒。提升效果还是很明显的。
pose_estimation_2d2d:
导入正确的图片位置参数即可,运行结果如下:
/home/wh/shenlan/slambook2/ch7/cmake-build-debug/pose_estimation_2d2d /home/wh/shenlan/slambook2/ch7/1.png /home/wh/shenlan/slambook2/ch7/2.png
-- Max dist : 95.000000
-- Min dist : 7.000000
一共找到了81组匹配点
fundamental_matrix is
[5.435453065896191e-06, 0.0001366043242983499, -0.02140890086929781;
-0.0001321142229818118, 2.339475702766975e-05, -0.006332906454914053;
0.02107630352186664, -0.003666833952417687, 1]
essential_matrix is
[0.007841371796261635, 0.2075176016541406, 0.1181719698273573;
-0.190270235105878, 0.03346203071185214, -0.6710910536624433;
-0.07512093110340777, 0.6702181417805779, 0.0197271235906156]
homography_matrix is
[0.9131751791765326, -0.1092435315745437, 29.95860009812312;
0.02223560352253669, 0.9826008005030865, 6.50891083922104;
-0.000100156038109612, 0.0001037779436268401, 1]
R is
[0.9980704024700457, -0.05457644989749674, 0.02961220744670522;
0.05354481493884546, 0.9979665375218761, 0.03457951387400768;
-0.03143921924039243, -0.03292720916178488, 0.9989631496658776]
t is
[-0.9411804751897357;
-0.1569351957186449;
0.2992501586739325]
t^R=
[-0.01108937434188349, -0.293474206690423, -0.1671204024221927; 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









