







deeplabv3+系列之ResNet骨干网络代码实现(包括了ResNet18,ResNet34,ResNet50,ResNet101,ResNet152)
基于paddlepaddle2.0版本的搭建。最近飞桨2.0版本出来啦!也挺好用的,所以就参考一些其他版本的代码,用paddlepaddle2.0版本重新写一下deeplabv3+ResNet网络,这篇文章为骨干网络部分。deeplabv3部分可以看下一篇文章:deeplabv3+系列之deeplabv3网络搭建
原论文地址:Deep Residual Learning for Image Recognition
paddlepaddle2.0版本安装教程
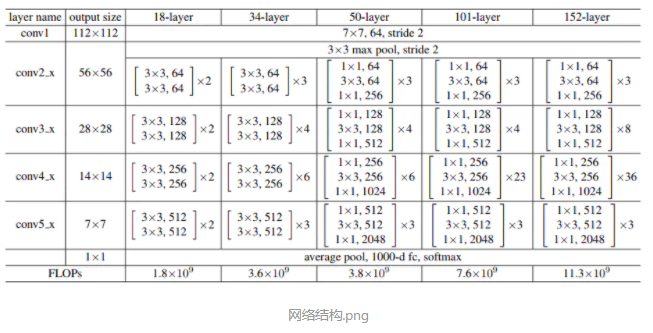
一.网络结构图:
二.可直接运行的代码:
import numpy as np
import paddle
import paddle.nn as nn
import paddle.nn.functional as F
from paddle.fluid.dygraph.base import to_variable
def SyncBatchNorm(*args, **kwargs):
"""一个是cpu情况下的归一化,一个是GPU情况下的归一化"""
if paddle.get_device() == 'cpu':
return nn.BatchNorm2D(*args, **kwargs)
else:
return nn.SyncBatchNorm(*args, **kwargs)
class ConvBNLayer(nn.Layer):
def __init__(self,
in_channels,
out_channels,
kernel_size,
stride=1,
groups=1,
act=None,
dilation=1,
padding=None,
name=None):
super(ConvBNLayer, self).__init__(name)
if padding is None:
padding = (kernel_size-1)//2
else:
padding=padding
self.conv = nn.Conv2D(in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding,
groups=groups,
dilation=dilation,
bias_attr=False)
self.bn = SyncBatchNorm(out_channels)
self.act = act
self._act_op = nn.ReLU()
def forward(self, inputs):
y = self.conv(inputs)
y = self.bn(y)
if self.act is 'relu':
y = self._act_op(y)
else:
y = y
return y
class BasicBlock(nn.Layer):
expansion = 1 # expand ratio for last conv output channel in each block
def __init__(self,
in_channels,
out_channels,
dilation=1,
stride=1,
padding=None,
shortcut=True,
name=None):
super(BasicBlock, self).__init__(name)
self.conv0 = ConvBNLayer(in_channels=in_channels,
out_channels=out_channels,
kernel_size=3,
stride=stride,
act='relu',
name=name)
self.conv1 = ConvBNLayer(in_channels=out_channels,
out_channels=out_channels,
kernel_size=3,
act=None,
name=name)
if not shortcut:
self.short = ConvBNLayer(in_channels=in_channels,
out_channels=out_channels,
kernel_size=1,
stride=stride,
act=None,
name=name)
self.shortcut = shortcut
def forward(self, inputs):
conv0 = self.conv0(inputs)
conv1 = self.conv1(conv0)
if self.shortcut:
short = inputs
else:
short = self.short(inputs)
#该OP是逐元素相加算子,输入 x 与输入 y 逐元素相加,并将各个位置的输出元素保存到返回结果中
y = paddle.add(x=short, y=conv1)
y = F.relu(y)
return y
class BottleneckBlock(nn.Layer):
expansion = 4
def __init__(self,
in_channels,
out_channels,
stride=1,
shortcut=True,
dilation=1,
padding=None,
name=None):
super(BottleneckBlock, self).__init__(name)
self.conv0 = ConvBNLayer(in_channels=in_channels,
out_channels=out_channels,
kernel_size=1,
act='relu')
# name=name)
self.conv1 = ConvBNLayer(in_channels=out_channels,
out_channels=out_channels,
kernel_size=3,
stride=stride,
padding=padding,
act='relu',
dilation=dilation)
# name=name)
self.conv2 = ConvBNLayer(in_channels=out_channels,
out_channels=out_channels * 4,
kernel_size=1,
stride=1)
# name=name)
if not shortcut:
self.short = ConvBNLayer(in_channels=in_channels,
out_channels=out_channels * 4,
kernel_size=1,
stride=stride)
# name=name)
self.shortcut = shortcut
self.num_channel_out = out_channels * 4
def forward(self, inputs):
conv0 = self.conv0(inputs)
#print('conv0 shape=',conv0.shape)
conv1 = self.conv1(conv0)
#print('conv1 shape=', conv1.shape)
conv2 = self.conv2(conv1)
#print('conv2 shape=', conv2.shape)
if self.shortcut:
short = inputs
else:
short = self.short(inputs)
#print('short shape=', short.shape)
#该OP是逐元素相加算子,输入 x 与输入 y 逐元素相加,并将各个位置的输出元素保存到返回结果中
y = paddle.add(x=short, y=conv2)
y = F.relu(y)
return y
class ResNet(nn.Layer):
def __init__(self, layers=50, num_classes=1000, multi_grid=[1, 2, 4], duplicate_blocks=False):
super(ResNet, self).__init__()
self.layers = layers
supported_layers = [18, 34, 50, 101, 152]
assert layers in supported_layers
mgr = [1, 2, 4] # multi grid rate for duplicated blocks
if layers == 18:
depth = [2, 2, 2, 2]
elif layers == 34:
depth = [3, 4, 6, 3]
elif layers == 50:
depth = [3, 4, 6, 3]
elif layers == 101:
depth = [3, 4, 23, 3]
elif layers == 152:
depth = [3, 8, 36, 3]
if layers < 50:
in_channels = [64, 64, 128, 256, 512]
else:
in_channels = [64, 256, 512, 1024, 2048]
self.out_channels = [64, 128, 256, 512]
self.conv = ConvBNLayer(in_channels=3,
out_channels=64,
kernel_size=7,
stride=2,
act='relu')
self.pool2d_max = nn.MaxPool2D(
kernel_size=3,
stride=2,
padding=1)
if layers < 50:
block = BasicBlock
l1_shortcut=True
else:
block = BottleneckBlock
l1_shortcut=False
self.layer1 = nn.Sequential(
*self.make_layer(block,
in_channels[0],
self.out_channels[0],
depth[0],
stride=1,
shortcut=l1_shortcut,
name='layer1'))
self.layer2 = nn.Sequential(
*self.make_layer(block,
in_channels[1],
self.out_channels[1],
depth[1],
stride=2,
name='layer2'))
self.layer3 = nn.Sequential(
*self.make_layer(block,
in_channels[2],
self.out_channels[2],
depth[2],
stride=1,
dilation=2,
name='layer3'))
# add multi grid [1, 2, 4]
self.layer4 = nn.Sequential(
*self.make_layer(block,
in_channels[3],
self.out_channels[3],
depth[3],
stride=1,
name='layer4',
dilation=multi_grid))
if duplicate_blocks:
self.layer5 = nn.Sequential(
*self.make_layer(block,
in_channels[4],
self.out_channels[3],
depth[3],
stride=1,
name='layer5',
dilation=[x*mgr[0] for x in multi_grid]))
self.layer6 = nn.Sequential(
*self.make_layer(block,
in_channels[4],
self.out_channels[3],
depth[3],
stride=1,
name='layer6',
dilation=[x*mgr[1] for x in multi_grid]))
self.layer7 = nn.Sequential(
*self.make_layer(block,
in_channels[4],
self.out_channels[3],
depth[3],
stride=1,
name='layer7',
dilation=[x*mgr[2] for x in multi_grid]))
self.last_pool = nn.AdaptiveAvgPool2D(output_size=(1,1))#平均自适应池化
self.fc = nn.Linear(in_features=self.out_channels[-1] * block.expansion,
out_features =num_classes)
self.out_dim = self.out_channels[-1] * block.expansion
def forward(self, inputs):
x = self.conv(inputs)
x = self.pool2d_max(x)
#print(x.shape)
x = self.layer1(x)
#print(x.shape)
x = self.layer2(x)
#print(x.shape)
x = self.layer3(x)
#print(x.shape)
x = self.layer4(x)
#print(x.shape)
x = self.last_pool(x)
x = paddle.reshape(x, shape=[-1, self.out_dim])
x = self.fc(x)
return x
def make_layer(self, block, in_channels, out_channels, depth, stride, dilation=1, shortcut=False, name=None):
layers = []
if isinstance(dilation, int):
dilation = [dilation] * depth
elif isinstance(dilation, (list, tuple)):
assert len(dilation) == 3, "Wrong dilation rate for multi-grid | len should be 3"
assert depth ==3, "multi-grid can only applied to blocks with depth 3"
padding = []
for di in dilation:
if di>1:
padding.append(di)
else:
padding.append(None)
layers.append(block(in_channels,
out_channels,
stride=stride,
shortcut=shortcut,
dilation=dilation[0],
padding=padding[0],
name=f'{name}.0'))
for i in range(1, depth):
layers.append(block(out_channels * block.expansion,
out_channels,
stride=1,
dilation=dilation[i],
padding=padding[i],
name=f'{name}.{i}'))
return layers
def ResNet18(**args):
model = ResNet(layers=18)
return model
def ResNet34(**args):
model = ResNet(layers=34)
return model
def ResNet50(**args):
model = ResNet(layers=50)
return model
def ResNet101(**args):
model = ResNet(layers=101)
return model
def ResNet152(**args):
model = ResNet(layers=152)
return model
def main():
x_data = np.random.rand(2, 3, 224, 224).astype(np.float32)
x = to_variable(x_data)
#ResNet101,其他同理
model = ResNet101()
model.eval()
pred = model(x)
print('dilated resnet50: pred.shape = ', pred.shape)
main()

















 900
900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









