







最近在思考怎么写后面的分享,虽然大多的分享都已经有对应的笔记,但是把零散的笔记整理的有条理、逻辑清晰也是有一定难度的。
有已经规划好的系列,比如
工具系列
Uav开发杂记是一个新的分享系列,用于分享一些零散的编程和算法知识,这些知识大多都可以自己看书或者搜索获取,这里分享的都是大家能用的上的小知识和技能,或许能给大家一些新的东西。
无人机是一个非常复杂的系统,涉及的知识非常多,就软件开发方向而言我们需要怎样的技能树呢,大家又已经点亮了多少呢。
技能树是把学习一种知识或者技能所需要的分项知识与技能通过树状图或在思维导图的形式构建出来。
参考
工欲善其事-3-整理技术笔记(gitbook)_AcmeUav的博客-CSDN博客工欲善其事,必先利其器。第三篇-整理技术笔记(gitbook)这是工具系列的近期最后一篇,分享一个整理自己技术笔记的方法。整理技术笔记的体会从事技术开发,整理自己的技术笔记是所有研发同学共通的基本需求,大家都是如何去整理自己开发过程中的笔记,项目中的文档的呢?我用过很多种方法,最早期用word文档,写一个个word然后整理到一个大文件夹下然后细分各个子类目录也用过一些笔记软件,如有道云笔记、onenote、为知笔记等已经记不清当时为什么切换这些笔记软件,应该是每个软件都有自己的优缺点 https://blog.csdn.net/weixin_43669461/article/details/119904255?spm=1001.2014.3001.5501这里的代码笔记结构基本就是无人机软件开发的技能树了,我们稍微整理一下,形成一个树状结构,如图所示:
https://blog.csdn.net/weixin_43669461/article/details/119904255?spm=1001.2014.3001.5501这里的代码笔记结构基本就是无人机软件开发的技能树了,我们稍微整理一下,形成一个树状结构,如图所示:
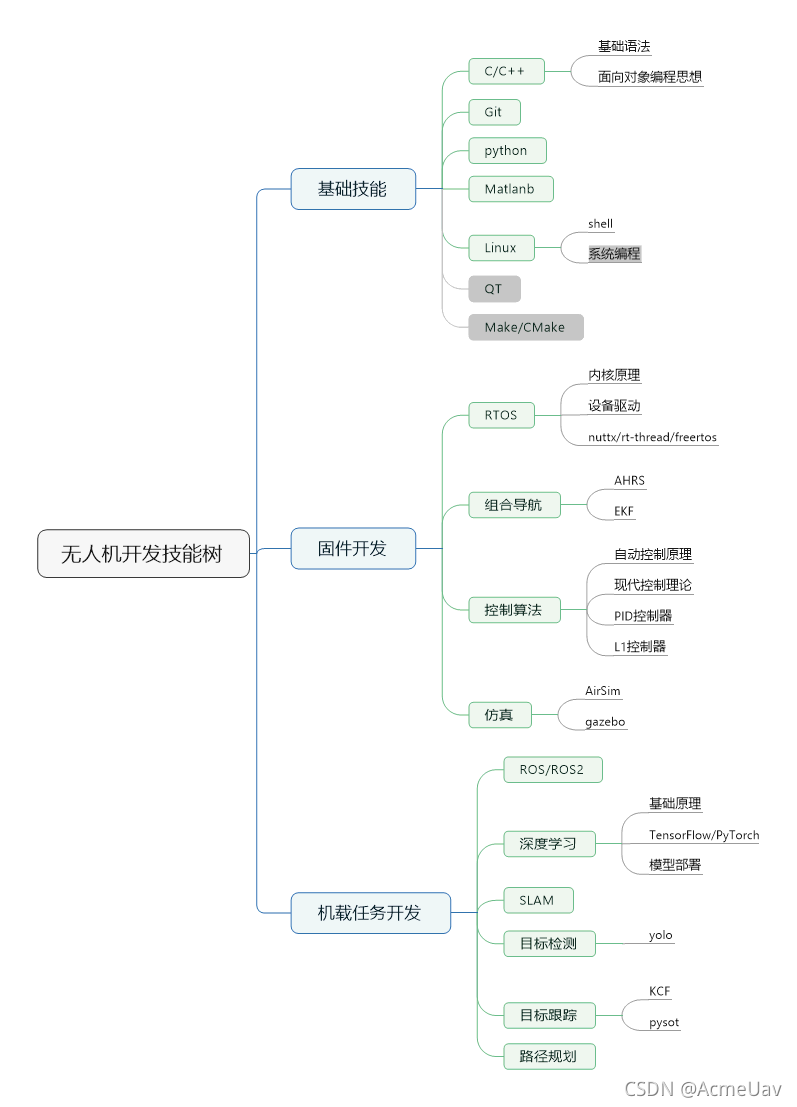
这个技能树列着列着就越来越高了,但还并不全面。
大家可能看过一个很火的视频,野生钢铁侠自制自动驾驶自行车
https://www.zhihu.com/zvideo/1384842680069963776
很厉害,基本点亮了以上技能树的全部,还包括硬件设计开发调试等等技能,基本整个产品从设计研发到加工测试调试的整个周期的技能全面掌握。
做出这样炫酷的东西是多少极客的梦想,梦想总是要有的,大家一步一步的去实现自己的梦想吧!
这个博客转载自我个人的微信公众号,这里会不定期更新一些我整理的无人机相关知识和个人设计,欢迎添加关注。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









