









 本文详述在Ubuntu+VSCode环境下,使用DevEcoDeviceTool进行鸿蒙源码的获取、开发环境搭建、工程配置、编译与烧录的全过程。涉及内容包括修改UbuntuShell为bash、安装DevEcoDeviceTool、配置工具链、编译器及烧录设置,以及解决编译和烧录过程中遇到的问题。
本文详述在Ubuntu+VSCode环境下,使用DevEcoDeviceTool进行鸿蒙源码的获取、开发环境搭建、工程配置、编译与烧录的全过程。涉及内容包括修改UbuntuShell为bash、安装DevEcoDeviceTool、配置工具链、编译器及烧录设置,以及解决编译和烧录过程中遇到的问题。
昨天写过一篇文章,是在命令行编译,使用命令行串口工具minicom烧录的。有点小麻烦。
推荐大家先试用上述方法试一试,里面要安装的依赖也在文章里面。文章链接
鸿蒙Dev Device Tool本身就是VSCode的一个扩展,在VSCode中试用图形界面一站式开发更加快捷。
鸿蒙开发学习我建议直接上Ubuntu+VScode,不用切换系统搞来搞去的。
本文将介绍在Ubuntu+VScode环境下鸿蒙源码编译与烧录的全过程。(这里用的是在gitee拉取的工程,本文先不讲工程各个目录、文件的作用,先走一遍完整过程)
鸿蒙开发者社区:https://device.harmonyos.com/cn/community/,遇到问题除了百度、csdn搜索,还可以在这里搜索,很多开发者都会遇到类似的问题。
目录
1.获取源码
我的开发板是Neptune w800,是HiHope公司(润和软件)的,直接去他们gitee的仓库拉取代码。
地址:
https://gitee.com/hihopeorg_group/neptune-harmony-os1.1-iot
下载后解压放到合适位置就先不用管了:

2.搭建开发环境
这里是在vscode中使用DevEco Device Tool ,工具链(gn、hc-gen、ninja)都会在下载DevEco Device Tool 的时候一并下载好,位置在:
/home/jaychou/.deveco-device-tool
后面在工程配置的时候还会说到。
如果你在命令行编译就要参考我上一篇文章进行环境配置了。
除此之外:VSCode和Python3.8是必需的,python3.8在ubunut20.04中本来就有,vscode下载安装就行了。
2.1 DevEco Device Tool 安装
2.1.1 将Ubuntu Shell环境修改为bash
- 执行如下命令,确认输出结果为bash。如果输出结果不是bash,请根据步骤2,将Ubuntu shell修改为bash。
ls -l /bin/sh
jaychou@jaychou-TM1705:~$ ls -l /bin/sh
lrwxrwxrwx 1 root root 4 4月 8 15:56 /bin/sh -> bash
- 打开终端工具,执行如下命令,输入密码,然后选择No,将Ubuntu shell由dash修改为bash。
sudo dpkg-reconfigure dash
2.1.2 下载DevEco Device Tool 3.0 Release Linux版本。
地址:DevEco Device Tool 3.0 Release Linux
- 解压:
unzip devicetool-linux-tool-3.0.0.400.zip
- 赋予可操作权限:
chmod 777 devicetool-linux-tool-3.0.0.400.sh
- 安装:
sudo ./devicetool-linux-tool-3.0.0.400.sh -- --install-plugins
安装成功,界面输出“Deveco Device Tool successfully installed.”。
- 打开vscode查看:

2.2 导入工程
- 打开DevEco Device Tool,进入Home页,点击Import Project打开工程
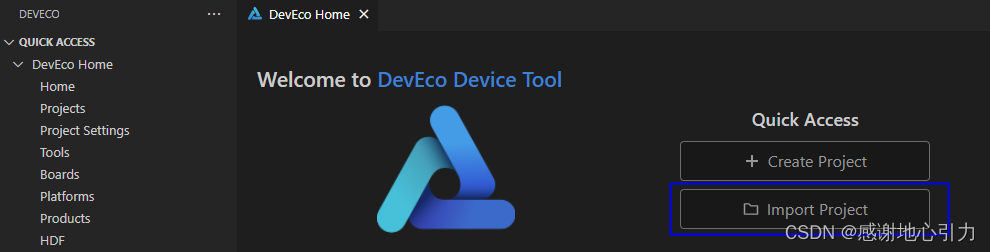
- 选择待打开的工程目录,点击Import打开。

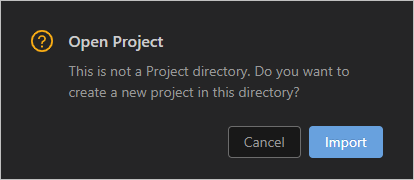
- 打开的目录不是DevEco Device Tool工程,则会出现如下提示框,点击Import。
- 在Select Project type界面,选择Import from OpenHarmony Source。

- 在Import Project界面,选择Product后,会自动填充对应的MCU、Board、company和kernel信息,然后ohosVersion选择对应的OpenHarmony源码版本。(我的已经打开过了,不用选,这里放的是鸿蒙官网HI386的开发版,操作都是类似的)
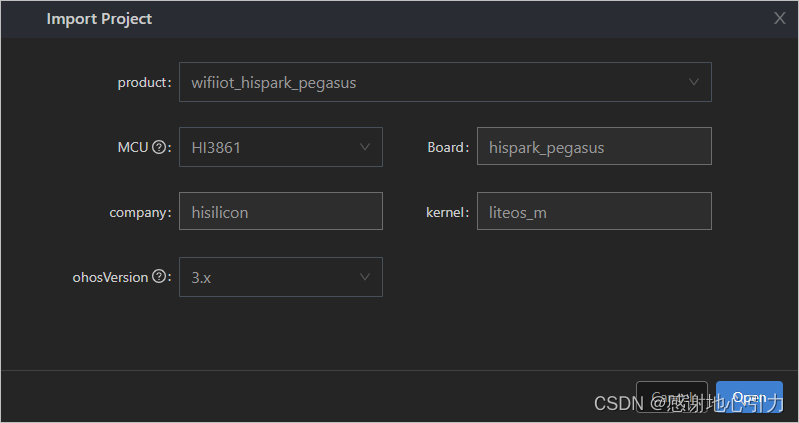
- 点击Open打开工程或源码。

2.3 工程配置(重点)
如图,在VSCode左侧菜单栏点击DevEco——Quick Access——主界面——工程设置,出现下面的配置界面。

2.3.1工具链构建
工具链存放路径是默认设置好的,在那个目录下存放着如下工具:

之前的文章有简介,此处不再重复。这一步一般不用你设置。
OpenHarmony版本选1.x,根据实际选择即可。
产品是wifiiot的,这些一般都不需要多余配置。
接下来是构建OpenHarmony的工具链,点击详情,可以看到鸿蒙需要的各种包如下,类型也不尽相同,有deb、pip等等,如果安装好了,就像下面一样status显示valid,否则是红色的invalid。

如果缺少包,点击下面的安装按钮,即可自动在线安装。可能会有部分包安装失败,需要自己手动安装。我当时是python的2个包,解决方法如下:
Python安装 scons、pycryptodome等各种库很慢、安装失败
2.3.2 编译器下载与配置
再往下,就是编译器的路径配置了。Neptune w800使用的是国产指令集c-sky(可自行百度),不同于一般arm芯片的RISC精简指令集。所以需要下载对应的编译器。
编译器资源在平头哥的网站:https://occ.t-head.cn/community/download,进去选择 工具 - 工具链-800 Series 中相应的版本。
名称:csky-elfabiv2-tools-x86_64-minilibc-xxxxx.tar.gz
下载完成后将工具包拷贝到相应的目录下,我的是:~/HarmonyOS_Tool(我试用命令行编译方式的时候工具的存放目录)
解压:(注意你的压缩包名字)
tar xzvf csky-elfabiv2-tools-x86_64-minilibc-20210423.tar.gz
在~/.bashrc文件添加环境变量(根据你的路径来):
sudo gedit ~/.bashrc
export PATH=~/HarmonyOS_Tool/csky-elfabiv2-tools-x86_64-minilibc-20210423/bin:$PATH
刷新环境变量:
source ~/.bashrc
回到vscode中选择相同的目录:

2.3.3 w800执行配置
上面都是toolchain下面的配置,接着对w800选项进行配置。需要设置的有:
build_type:默认为debug
upload_partitions:选择待烧录的文件名称。
upload_port:选择烧录的串口(下面马上讲)。
upload_protocol:选择烧录协议,固定选择“xmodem”。

怎么知道串口是哪个呢?如下(方法不唯一),可以看到在23:06分我的/dev/ttyUSB0上连接了开发版,上面的upload_port填写/dev/ttyUSB0即可。
jaychou@jaychou-TM1705:~$ ls -l /dev/ttyUSB*
crw-rw-rw- 1 root dialout 188, 0 4月 9 23:06 /dev/ttyUSB0
3.编译与下载
如图。
clean:清除之前编译的内容。
build:编译(只编译项目更改的内容,相对更快一点)。
rebuild:重新编译。
upload:烧录。
monitor:和串口助手这类工具类似,可以实时监视串口输出。
下面按步骤进行说明。

3.1 Build
在各种环境配置好之后,点击Build,可能会出现以下报错:

找不到clang编译器,解决方法:
下载llvm安装包:
sudo wget https://repo.huaweicloud.com/harmonyos/compiler/clang/9.0.0-36191/linux/llvm-linux-9.0.0-36191.tar
解压,我是复制到前面说过的/HarmonyOS_ToolHarmonyOS_Tool文件夹下面才解压的:
sudo tar -xvf llvm-linux-9.0.0-36191.tar
同样的,在环境变量中添加路径:
export PATH=~/HarmonyOS_Tool/llvm/bin:$PATH
再刷新环境变量就可以了。
再次编译:

3.2 Upload
编译完成之后,插上开发版,点击Upload,可能会出现下面报错:

即打不开对应的端口,为什么呢?
来到linux,最敏感的一个东西就是文件的权限了:读、写、执行。
来我给/dev/ttyUSB0权限不就OK了?直接最高权限(滑稽)
sudo chmod 777 /dev/ttyUSB0
再次烧录,确实OK了。但下一次烧写就有不行了,我不能每一次都赋予一遍权限吧。
我直接给USB to TTL设备权限:通过增加udev规则来实现,步骤如下:
sudo gedit /etc/udev/rules.d/70-ttyusb.rules
在文件内增加一行
KERNEL=="ttyUSB[0-9]*", MODE="0666"
重新插入,直接一劳永逸。
成功烧录:(按照提示按一下板子上的reset)

3.3 Monitor
点击Monitor,重启设备,看到输出:

遇到困难?欢迎评论!


















 891
891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











