









 本文探讨了数字调制的必要性,详细介绍了数字带通调制技术,包括相移键控、频移键控等,并分析了在高斯噪声背景下信号检测的方法。此外,还讨论了相干与非相干检测的原理,以及不同调制方式下的误比特率和误码率。
本文探讨了数字调制的必要性,详细介绍了数字带通调制技术,包括相移键控、频移键控等,并分析了在高斯噪声背景下信号检测的方法。此外,还讨论了相干与非相干检测的原理,以及不同调制方式下的误比特率和误码率。
文章目录
1. 为什么需要调制
数字调制是将数字符号转换成适合信道特性的波形的过程。基带调制中这些波形通常具有整形脉冲的形式,而在带通调制(bandpass modulation)中则利用整形脉冲去调制正弦信号,这个正弦信号被称为载波波形(carrier wave),或简称为载波(carrier)。将载波转换成电磁场(EM)传播到指定的地点就可以实现无线传输。那么,为什么一定要通过载波来实现基带信号的无线传输呢?可以这样解释,电磁场必须利用天线才能在空间传输,天线的尺寸主要取决于波长 λ \lambda λ 及应用的场合。对蜂窝电话来说, 天线长度一般为 λ / 4 \lambda/4 λ/4,波长 λ \lambda λ 等于 c / f c/f c/f, c c c 是光速 3 × 1 0 8 m/s 3 \times 10^8\text{ m/s} 3×108 m/s 。假设发送一基带信号( f = 3000 Hz f = 3 000\text{ Hz} f=3000 Hz),如果不通过载波而直接耦合到天线发送,采用电话工业基准 λ / 4 \lambda/4 λ/4 作为天线的尺寸,对于 3 000 Hz 3\ 000\text{ Hz} 3 000 Hz 的基带信号,其尺寸为 λ / 4 = 2.5 × 1 0 8 m ≈ 15 英里 \lambda/4 = 2.5 \times 10^8\text{ m} \approx 15\text{ 英里} λ/4=2.5×108 m≈15 英里(1 英里 = 1.609 km)。为了在空间中传输 3 000 Hz 3\ 000\text{ Hz} 3 000 Hz 的信号,不用载波进行调制,需要尺寸为 15 英里的天线。但是如果把基带信号先调制在较高的载波频率上,比如说 900 MHz 900\text{ MHz} 900 MHz,等效的天线尺寸则为 8 cm。因此,对于各种无线传输系统来说,利用载波进行带通调制是很有必要的。
此外,带通调制还有其他几方面的优点:
- 如果一条信道要传输多路信号, 则需要利用调制来区分不同的信号。这项技术称为频分复用(frequency-division multiplexing)。
- 可以应用调制将干扰的影响减至最小,这种调制方式称为扩展频谱调制(spread-spectrum modulation),它所需要的系统带宽比传输信息所要求的最小带宽大得多,后面将会讨论为减小干扰而对带宽的权衡问题。
- 可以利用调制将信号置于设计滤波器或放大器时需要的频段上,在接收机中、射频(RF)信号到中频(IF)信号的转换就是一个例子。
2. 数字带通调制技术
通过带通调制(模拟或数字)过程,可以将携带信息的信号转换为正弦波形;对于数字调制,一个周期为
T
T
T 的正弦波形代表了一个码元。不同正弦信号之间可以用三个特进行区分:幅度、频率和相位。因此,带通调制可以分别对射频载波的幅度、频率和相位,或三者之间的联合进行调制,传输的载波中三个参量随着信号的变化而变化。载波的一般表达式为
s
(
t
)
=
A
(
t
)
cos
θ
(
t
)
s\left( t \right) =A\left( t \right) \cos \theta \left( t \right)
s(t)=A(t)cosθ(t)其中,
A
(
t
)
A\left( t \right)
A(t) 是随时间变化的幅度,
θ
(
t
)
\theta \left( t \right)
θ(t) 是随时间变化的角度,也可以表示成
θ
(
t
)
=
ω
0
t
+
φ
(
t
)
\theta \left( t \right) =\omega _0 t +\varphi \left( t \right)
θ(t)=ω0t+φ(t)因此,载波可以进一步表示为
s
(
t
)
=
A
(
t
)
cos
[
ω
0
t
+
φ
(
t
)
]
s\left( t \right) =A\left( t \right) \cos \left[ \omega _0t+\varphi \left( t \right) \right]
s(t)=A(t)cos[ω0t+φ(t)]其中,
ω
0
\omega _0
ω0 是载波的角频率,
φ
(
t
)
\varphi \left( t \right)
φ(t) 是相位。
f
f
f 和
ω
\omega
ω 都可以用来表示频率;如果用
f
f
f 表示, 则频率单位为
Hz
\text{Hz}
Hz;如果用
ω
\omega
ω 表示,则频率单位为
rad/s
\text{rad/s}
rad/s;两者之间的对应关系为
ω
=
2
π
f
\omega = 2\pi f
ω=2πf。
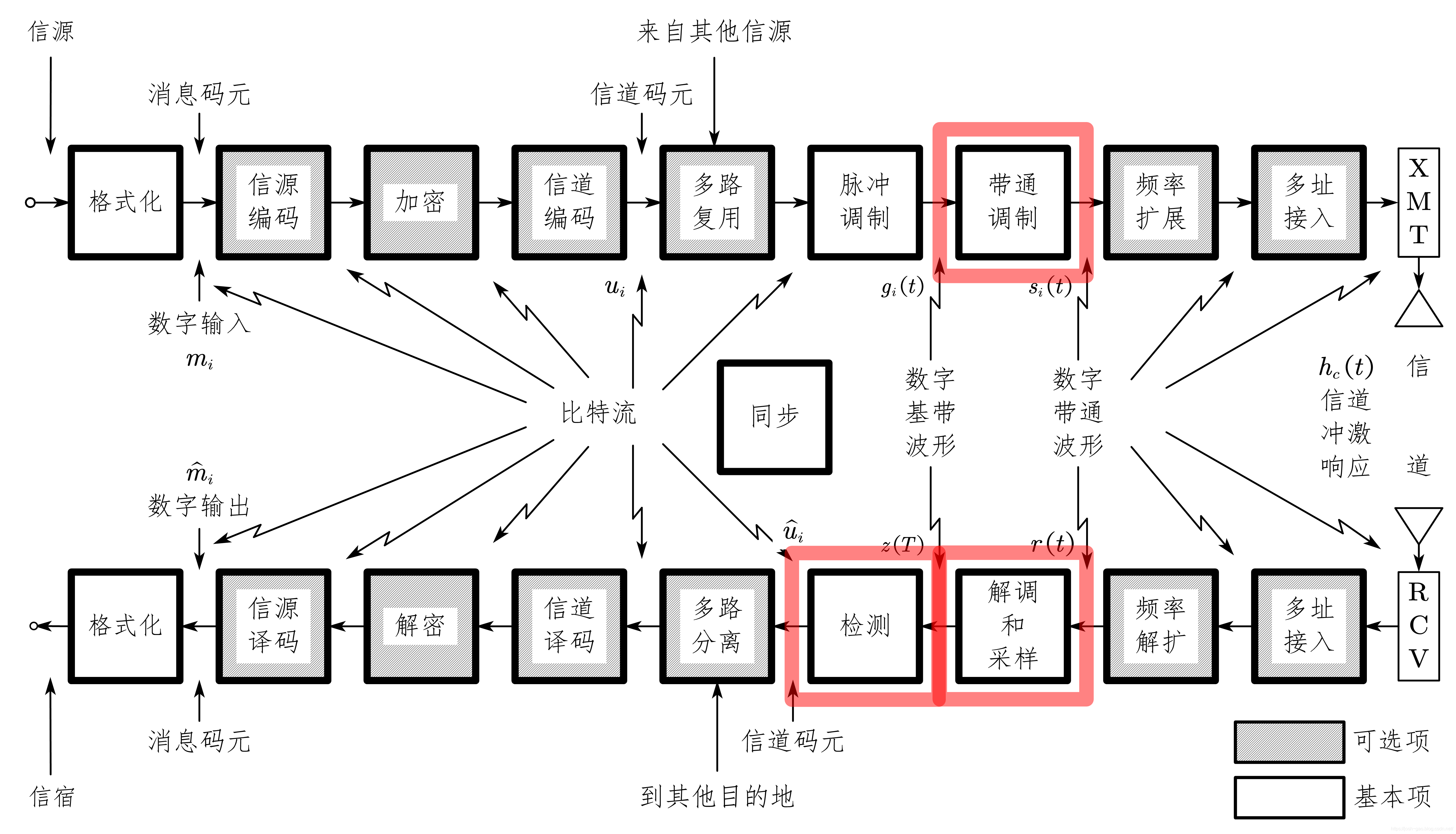
图 4.1 列出了基本的带通调制/解调(bandpass modulation/demodulation)类型。
- 如果接收机利用了载波的相位来检测信号,则称为相干检测(coherent detection);
- 如果没有利用相位参考信息,则称为非相干检测(noncoherent detection)。
在数字通信中, 解调和检测经常可以互用, 尽管解调侧重于波形的恢复,而检测侧重于码元的判决。在理想的相干检测中,每种可能的发射信号的模型对接收端来说都是已知的。用这些已知的模型波形去等效接收信号,使接收信号在各方面(包括相位)都等同于模型波形。然后接收端采用锁相技术跟踪到达的信号。解调时,接收端将接收到的信号与各原型信号相乘,进行相干解调。图 4.1 中,相干调制/解调一项包括相移键控(PSK)、频移键控(FSK)、幅移键控(ASK)、连续相位调制(CPM)和混合调制。本文主要讨论基本的带通调制方式, 一些特殊的调制方式如偏移正交 PSK(OQPSK),最小频移键控(MSK)属于 CPM 的范畴,正交幅度调制(QAM)将在 Part 9 中进行讨论。

非相干解调系统在解调中未使用接收信号的相位值,这样就不需要对相位进行估计。非相干解调的好处是大大降低了系统的复杂性,而付出的代价则是误码率( P E P_E PE)的增加。图 4.1 中列出了非相干调制/解调的类型,与相干一样,也有 DPSK,FSK,ASK,CPM 和混合调制。既然非相干解调中相位信息是无用的,那么如何理解非相干情况下的相移键控呢?非相干解调中不需要参考接收载波的相位信息,我们把这类重要的 PSK 形式称为非相干(或者差分相干) PSK。这种“伪 PSK”也称为差分 PSK(DPSK),在检测当前的码元时,它只是参考了前一个码元的相位信息。在 5.1 小节和 5.2 小节中将对此进行详细描述。
2.1 正弦信号的相量表示
利用著名的欧拉三角等式,可以引入复数表示的正弦载波波形,如下所示:
e
j
ω
0
t
=
cos
ω
0
t
+
j
sin
ω
0
t
e^{j\omega _0t}=\cos \omega _0t+j\sin \omega _0t
ejω0t=cosω0t+jsinω0t
cos
ω
0
t
\cos \omega _0t
cosω0t 或
sin
ω
0
t
\sin \omega _0t
sinω0t 这种表达较为简洁,看起来更为舒适,那么引入复数表达式能带来什么好处呢?第 6 节中将利用复数表示形式更加方便地描述调制和解调的实现过程。用上式描述载波信号带来的好处有:
- 首先,任何载波波形其指数形式 e j ω 0 t e^{j\omega _0t} ejω0t 都包含两个重要的正交分量,分别为同相(实部)分量和正交(虚部)分量,分量之间相互正交。
- 其次,如图 4.2 所示,未调制载波信号在极坐标系统中可以很方便地表示成单位相量(phasor)或矢量以恒定的角速度 ω 0 \omega_0 ω0 弧度/秒逆时针旋转。随着时间的增加(从 t 0 t_0 t0 至 t 1 t_1 t1),可以想像出旋转的矢量在同相坐标轴( I I I)和正交坐标轴( Q Q Q)上投影的变化情况。笛卡儿坐标系上分别定义了 I I I 通道和 Q Q Q 通道,两个通道上的投影分别代表了与之有关的信号分量( 相互之间正交)。
- 再次,在对载波进行调制时,可以把调制看成对旋转相量(及投影)的轻微有序的扰动。

图4.2 正弦信号的相量表示
例如,考虑调幅信号(AM),用幅度为单位长度,频率为
ω
m
\omega_m
ωm 的正弦信号去调制载波,其中,
ω
m
≪
ω
0
\omega_m\ll\omega_0
ωm≪ω0。发送信号的解析式为
s
(
t
)
=
ℜ
{
e
j
ω
0
t
(
1
+
e
j
ω
m
t
2
+
e
−
j
ω
m
t
2
)
}
s\left( t \right) =\Re \left\{ e^{j\omega _0t}\left( 1+\frac{e^{j\omega _mt}}{2}+\frac{e^{-j\omega _mt}}{2} \right) \right\}
s(t)=ℜ{ejω0t(1+2ejωmt+2e−jωmt)}其中,
ℜ
{
⋅
}
\Re\left\{\ \cdot\ \right\}
ℜ{ ⋅ } 是取实部运算。图 4.3 说明了图 4.2 所示的旋转相量
e
j
ω
0
t
e^{j\omega _0t}
ejω0t 受两个边带分量的扰动——
e
j
ω
m
t
/
2
e^{j\omega _mt}/2
ejωmt/2 逆时针旋转,
e
−
j
ω
m
t
/
2
e^{-j\omega _mt}/2
e−jωmt/2 顺时针旋转。边带相量的旋转速度显然要慢于载波相量的旋转速度。这样合成信号产生的效果就使得载波相量幅度随着边带分量的变化一会变长一会又变短,但是其频率保待恒定——这就是“调幅”过程。

再举个例子,用调频(FM)来说明相量图的实用性。同样,用频率为
ω
m
\omega_m
ωm 的单位正弦信号来调制载波。窄带调频(NFM)解析式同 AM 有相似的形式,可表示成
s
(
t
)
=
ℜ
{
e
j
ω
0
t
(
1
−
β
2
e
−
j
ω
m
t
+
β
2
e
j
ω
m
t
)
}
s\left( t \right) =\Re \left\{ e^{j\omega _0t}\left( 1-\frac{\beta}{2}e^{-j\omega _mt}+\frac{\beta}{2}e^{j\omega _mt} \right) \right\}
s(t)=ℜ{ejω0t(1−2βe−jωmt+2βejωmt)}其中,
β
\beta
β 为调频指数。图 4.4 说明了旋转载波相量如何受两个边带分量的扰动,但因为上式中一个边带分量是负值,所以顺时针和逆时针边带相量具有与 AM 不同的对称性。在 AM 情况下,边带对称性使得载波相量随时间变长或变短。而在 NFM 中,边带对称性(与 AM 相差
90
°
90\degree
90°)使得载波相量随边带信号的变化加速旋转或减速旋转,但其幅度是不变的一一这就是“调频”过程。

图 4.5 表示了最普通的数字调制方式:PSK,FSK,ASK 以及 ASK 和 PSK(ASK/PSK 或 APK)的混合调制。第一列列出了解析表达式,第二列画出了关于时间的波形函数,第三列是矢量(或相量)示意图,坐标轴为正交函数
{
ψ
j
(
t
)
}
\left\{ \psi _j\left( t \right) \right\}
{ψj(t)}。一般对于
M
M
M 进制信号,处理器同时收到
k
k
k 比特信息(或信道比特,如果已经进行编码的话),然后指示调制器产生已知的
M
=
2
k
M= 2^k
M=2k 个波形中的一个。当
k
=
1
k = 1
k=1,即为二进制调制,是
M
M
M 进制调制的一个特例。

图 4.2 中把载波解释成以恒定速度即载波频率 ω 0 rad/s \omega_0\text{ rad/s} ω0 rad/s 旋转的相量。图 4.5 把每种数字调制方式的相量示意图表示成信号的星座图(信号空间的矢量或点),其中时间未标出。换句话说,未调制载波恒速旋转的特性已经改变,并且仅表现为信号之间相量位置关系。图 4.5 中的每个例子均设定了特定的 M M M,即信号集的大小。
2.2 相移键控
相移键控(PSK)是在太空计划的早期发展起来的, 现在广泛应用于军事和商用通信系统中。PSK 的一般表达式为
s
i
(
t
)
=
2
E
T
cos
[
ω
0
t
+
φ
i
(
t
)
]
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left[ \omega _0t+\varphi _i\left( t \right) \right] \quad\begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Ecos[ω0t+φi(t)]0⩽t⩽Ti=1,⋯,M其中,
φ
i
(
t
)
\varphi _i\left( t \right)
φi(t) 有
M
M
M 个离散值,可以表示为
φ
i
(
t
)
=
2
π
i
M
i
=
1
,
⋯
,
M
\varphi _i\left( t \right) =\frac{2\pi i}{M}\quad i=1,\cdots ,M
φi(t)=M2πii=1,⋯,M图 4.5a 所示为二进制 PSK(BPSK),即
M
M
M 等于
2
2
2。
E
E
E 是码元能量,
T
T
T 是码元持续时间,
0
⩽
t
⩽
T
0\leqslant t\leqslant T
0⩽t⩽T。在 BPSK 调制中,已调数据信号波形
s
i
(
t
)
s_i\left( t \right)
si(t) 的相位有两种状态,
0
0
0 或者
π
\pi
π(
180
°
180\degree
180°)。图 4.5a 就是典型的 BPSK 波形图,在码元的变化处有一个相位的突变。如果调制的数据流不断在 1 和 0 之间变化, 则每个变化点都会有这样的突变。信号波形可以看做极坐标图中的矢量或相量,矢量的长度对应于信号幅度,矢量方向则与其他
M
−
1
M-1
M−1 个信号相位有关。在 BPSK 例子中,矢量图表示相差
180
°
180\degree
180° 的两个反相矢量,描述这种相反矢量的信号集称为对极信号集(antipodal signal set)。
2.3 频移键控
FSK 调制一般表示式为
s
i
(
t
)
=
2
E
T
cos
(
ω
i
t
+
φ
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left( \omega _it+\varphi \right) \quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Ecos(ωit+φ)0⩽t⩽Ti=1,⋯,M其中,频率项
ω
i
\omega_i
ωi 有
M
M
M 个离散值,相位项
φ
\varphi
φ 是任意常量。图 4.5b 所示的 FSK 波形在码元跳变处频率发生明显的改变,图中描述了在码元变化处一个频率到另一个频率的平稳变化。这是一类特殊的 FSK,称为连续相位 FSK(CPFSK)。对一般的 MFSK,由于相位的不连续,切换到另一个频率的变化显得很突然。在如图所示的例子中,
M
M
M 选为 3,相应的波形的类型数也为
3
3
3。注意,此处
M
=
3
M=3
M=3 是为了强调坐标轴之间的相互垂直关系。实际上,
M
M
M 通常选为 2 的非零整数次幂(2、4、8、16、…)。 信号集可以由笛卡儿坐标刻画,每个互相垂直的坐标轴都代表了一个不同频率的正弦信号。前面已经提过,由这种相互垂直的矢量来刻画的信号集称为正交信号。并不是所有的 FSK 信号都是正交的,任何正交的信号集都必须满足 《Part 3——基带信号解调与检测》的 1.3 小节提出的正交信号的准则。对 FSK 信号集,要使其满足该准则,则两个不同频率信号之间在坐标轴上的间距必须满足 5.4 小节中提到的正交性条件。
2.4 幅移键控
图 4.5c 所示的 ASK 信号,通用表达式为
s
i
(
t
)
=
2
E
i
(
t
)
T
cos
(
ω
0
t
+
φ
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E_i\left( t \right)}{T}}\cos \left( \omega _0t+\varphi \right)\quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Ei(t)cos(ω0t+φ)0⩽t⩽Ti=1,⋯,M其中,振幅项
2
E
i
(
t
)
T
\sqrt{\dfrac{2E_i\left( t\right)}{T}}
T2Ei(t) 有
M
M
M 个离散值,相位项
φ
\varphi
φ 是任意常量。在图 4.5c 中,
M
M
M 为 2,相应的波形数也为 2。ASK 波形的一个典型例子是雷达发射,其幅度状态有两个:
2
E
i
(
t
)
T
\sqrt{\dfrac{2E_i\left( t\right)}{T}}
T2Ei(t) 和 0。由图 4.5c 可以看到其中一个矢量对应着最大幅度状态,原点则对应着 0 幅度状态。二进制 ASK 信号(也称为通断键控)是 20 世纪初最早运用于无线电报中的数字调制方式之一。如今数字通信中不再应用这种简单的 ASK,因此这里就不再赘述。
2.5 振幅相位联合键控
图 4.5d 所示为 ASK 和 PSK 联合调制波形,一般表达式为
s
i
(
t
)
=
2
E
i
(
t
)
T
cos
[
ω
0
t
+
φ
i
(
t
)
]
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E_i\left( t \right)}{T}}\cos \left[ \omega _0t+\varphi_i \left( t\right)\right]\quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Ei(t)cos[ω0t+φi(t)]0⩽t⩽Ti=1,⋯,M对信号幅度和相位均做了描述。图 4.5d 的 APK 波形给出了码元变化时刻同步的相位和幅度变化。本例中,
M
M
M 选为 8,相应的波形数也为 8。图中画出了相位幅度平面上假设的包含 8 个矢量的信号集。这 8 个信号中有 4 个幅度相同,每个矢量之间的夹角为 45°。将二进制信号空间中的包含
M
M
M 个码元的信号集分布在矩形星座图上,这些信号称为正交幅度调制(QAM),Part 9 将对此进行详细讨论。
图 4.5 中每种调制方式(FSK 除外)的矢量图均可在极坐标上刻画其信号幅度和相位。对正交 FSK(见 5.4 小节),可以在笛卡儿坐标空间中描述,每个坐标轴代表 M M M 个正交频率信号集中的一个,即 cos ω i t \cos \omega _it cosωit。
2.6 波形振幅系数
由上述 PSK、FSK 和 ASK 信号的通用表达式可以看出,对所有调制方式的信号幅度系数具有相同的表达式
2
E
T
\sqrt{\dfrac{2E}{T}}
T2E。推导如下。首先,
s
(
t
)
=
A
cos
ω
t
s\left( t \right) =A\cos \omega t
s(t)=Acosωt这里
A
A
A 为波峰值,由于正弦信号的波峰值为有效值的
2
\sqrt{2}
2 倍,于是,
s
(
t
)
=
2
A
rms
cos
ω
t
=
2
A
rms
2
cos
ω
t
s\left( t \right) =\sqrt{2}A_{\text{rms}}\cos \omega t=\sqrt{2A_{\text{rms}}^{2}}\cos \omega t
s(t)=2Armscosωt=2Arms2cosωt假定信号为电压或电流波形,
A
rms
2
A_{\text{rms}}^{2}
Arms2 表示平均功率
P
P
P(单位电阻,
1
Ω
1\ \Omega
1 Ω)。因此,
s
(
t
)
=
2
P
cos
ω
t
s\left( t \right) =\sqrt{2P}\cos \omega t
s(t)=2Pcosωt由能量和平均功率的关系
P
=
E
T
P=\dfrac{E}{T}
P=TE,代入上式得到
s
(
t
)
=
2
E
T
cos
ω
t
s\left( t \right) =\sqrt{\frac{2E}{T}}\cos \omega t
s(t)=T2Ecosωt 这样既可以用上述的
A
A
A 也可用
2
E
T
\sqrt{\dfrac{2E}{T}}
T2E 来表示信号幅度。由于接收信号的能量是决定判决过程误码率性能的一个很重要参数,因此用
2
E
T
\sqrt{\dfrac{2E}{T}}
T2E 来表示信号幅度更为适合,这样便于直接用信号能量来求解差错概率
P
E
P_E
PE。
3. 高斯噪声背景下的信号检测
带通模式下的检测过程本质上完全等同于《Part 3——基带信号解调与检测》中讨论的基带情况,因为在检测过程之前,接收到的带通波形必须转换为基带波形。对于线性系统,频率的搬移并不影响检测结果。实际上,有如下的等效性原理(equivalence theorem):先执行带通信号的线性过程,然后将信号外差到基带信号上,其结果等效于先将带通信号外差到基带上,然后进行基带信号的线性过程。“外差”(heterodyning)是指将频率转化或混合以使得信号频谱搬移的过程。根据等效性原理,所有对带通信号的模拟均可在基带信号上进行(为简便起见),两者处理的结果是相同的。这就意味着在大多数数字通信系统中,对其性能的描述和分析都可在基带信道上进行。
3.1 判决区域
考虑图 4.6 中的二进制信号空间, s 1 + n \mathbf{s}_1+\mathbf{n} s1+n 和 s 2 + n \mathbf{s}_2+\mathbf{n} s2+n 分别是受噪声干扰的二元信号矢量,其中,噪声矢量 n \mathbf{n} n 是零均值的随机矢量。因此,接收的信号矢量是均值为 s 1 \mathbf{s}_1 s1 或 s 2 \mathbf{s}_2 s2 的随机矢量。检测的主要目的就是接收到 r \mathbf{r} r 之后, 判断发送信号是 s 1 \mathbf{s}_1 s1 还是 s 2 \mathbf{s}_2 s2。通常使用的方法是对信号进行分类以获得最小期望的 P E P_E PE,当然也可以使用其他的策略。在 M M M 为 2 的情况下, s 1 \mathbf{s}_1 s1 和 s 2 \mathbf{s}_2 s2 可以认为是等概出现的, 而噪声可看做加性高斯白噪声(AWGN)过程。这样,最小差错判决准则等价于选择信号分类,使得距离 d ( r , s i ) = ∥ r − s i ∥ d\left( \mathbf{r},\mathbf{s}_i \right) =\lVert \mathbf{r}-\mathbf{s}_i \rVert d(r,si)=∥r−si∥ 最小。 ∥ x ∥ \lVert \mathbf{x} \rVert ∥x∥ 称为矢量 x \mathbf{x} x 的范数(norm)或长度(magnitude),该规则常用来确定判决区域。图 4.6 中用下面的方法构建判决区域:
- 首先,连接信号矢量 s 1 \mathbf{s}_1 s1 和 s 2 \mathbf{s}_2 s2 的端点,
- 然后,做连线的垂直平分线。
注意,如果 s 1 \mathbf{s}_1 s1 和 s 2 \mathbf{s}_2 s2 的幅度相同,则垂直平分线通过信号空间的原点。对于图 4.6 中 M = 2 M = 2 M=2 的情况,做出的垂直平分线正是与 s 1 \mathbf{s}_1 s1 和 s 2 \mathbf{s}_2 s2 等距的点的轨迹因此,该平分线是判决区域 1 和判决区域 2 的边界。这样,根据判决区域(decision region)可以描述出判决器的判决准则(decision rule):
- 当接收到的信号矢量位于区域 1 时,发送信号判决为 s 1 \mathbf{s}_1 s1;
- 当接收到的信号矢量位于区域 2 时,发送信号判决为 s 2 \mathbf{s}_2 s2。
对于图 4.6,若
θ
\theta
θ 等于
180
°
180\degree
180°,则信号集
s
1
\mathbf{s}_1
s1 和
s
2
\mathbf{s}_2
s2 表示 BPSK 。该图中,为了强调一般意义上的判决区域思想,
θ
\theta
θ 刻意选为小于
180
°
180\degree
180°。

3.2 相关接收机
第 2 节讨论了高斯噪声下基带(baseband)二进制信号的检测问题。由于带通(bandpass)信号的检测采用了同样的原理, 因此只需概括几个关键的结论。下面重点讨论匹配滤波器(也称为相关器) 的实现。除了二进制检测,还必须进一步考虑更一般的
M
M
M 进制信号的检测。假定影响检测性能的只有 AWGN,则接收信号是发送信号与随机噪声之和:
r
(
t
)
=
s
i
(
t
)
+
n
(
t
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
r\left( t \right) =s_i\left( t \right) + n\left( t \right)\quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
r(t)=si(t)+n(t)0⩽t⩽Ti=1,⋯,M给定这样的接收信号,判决过程包括两个基本步骤,如图 3.1 所示。
- 第一步, 将接收信号波形 r ( t ) r\left( t \right) r(t) 简化为单个的随机变量 z ( T ) z\left( T \right) z(T),或者随机变量集合 z i ( T ) ( i = 1 , ⋯ , M ) z_i\left( T \right)\left( i=1,\cdots,M \right) zi(T)(i=1,⋯,M), T T T 为码元周期,对解调器的输出在 t = T t=T t=T 时刻进行采样就可以得到这样的输出。
- 第二步,将 z ( T ) z\left( T \right) z(T) 与门限值比较,或者选取最大的 z i ( T ) z_i\left( T \right) zi(T) 来对码元进行判决。
第一步实际上是把传输的信号波形转换成判决空间上的一点,该点称为预检测点(predetection point),是接收器中很重要的参考点。当讲到接收信号功率,或接收干扰噪声,或 E b / N 0 E_b/N_0 Eb/N0 时,通常要考虑此预检测点。有时这样的接收参数对接收器输入端(receiver input)或接收天线(receiving antenna)的描述不是很严谨,但是在用这种方式进行描述时,一个基本的假设是在输入端和预检测点之间没有 SNR 或 E b / N 0 E_b/N_0 Eb/N0 的损失。在每个码元时刻,预检测点得到的信号是基带脉冲的采样。此时我们还没有得到比特位,但是却定义了每比特能量与 N 0 N_0 N0 的比值,这是不是很矛盾呢?实际上不是的,作为很方便的参考点,这里的基带脉冲(在比特判决之前)可以有效地代表比特位。第二步可以认为是判断信号点位于哪个判决区域。为了优化判决器(即最小化错误概率),很有必要优化随机变量波形的变换,我们既可以使用第一步的匹配滤波器或相关器,也可以优化第二步的判决准则。
在《Part 3——基带信号解调与检测》的 2.2 小节 和 2.3 小节中提到,
t
=
T
t= T
t=T 时刻匹配滤波器的输出具有最大信噪比,相关器也可以认为是匹配滤波器的实现。图 4.7a 所示为包含
M
M
M 个相关器的相关接收器,它把接收波形
r
(
t
)
r\left( t \right)
r(t) 转换为
M
M
M 个相关器输出序列
z
i
(
T
)
(
i
=
1
,
⋯
,
M
)
z_i\left( T \right)\left( i=1,\cdots,M \right)
zi(T)(i=1,⋯,M)。每个相关器输出均由与接收信号的乘积积分或相关运算得到
z
i
(
T
)
=
∫
0
T
r
(
t
)
s
i
(
t
)
d
t
i
=
1
,
⋯
,
M
z_i\left( T \right) =\int_0^T{r\left( t \right) s_i\left( t \right) \text{d}t}\quad i=1,\cdots ,M
zi(T)=∫0Tr(t)si(t)dti=1,⋯,M 相关即匹配,相关器就是使到来的接收信号
r
(
t
)
r\left( t \right)
r(t) 与每个待选的发送波形
s
i
(
t
)
s_i\left( t \right)
si(t)(接收器的先验信号波形)匹配。一个合理的判决准则就是选取波形
s
i
(
t
)
s_i\left( t \right)
si(t) 使之与
r
(
t
)
r\left( t \right)
r(t) 最佳匹配或有最大的相关性。换言之,判决规则是
选
择
s
i
(
t
)
,
使
其
对
应
于
最
大
的
z
i
(
T
)
\color{red}选择s_i\left( t \right),使其对应于最大的z_i\left( T \right)
选择si(t),使其对应于最大的zi(T)
由《Part 3——基带信号解调与检测》的 1.3 小节可知,
任
何
信
号
集
{
s
i
(
t
)
}
(
i
=
1
,
⋯
,
M
)
都
可
以
表
示
成
一
些
基
本
函
数
集
{
ψ
j
(
t
)
}
(
j
=
1
,
⋯
,
N
)
N
⩽
M
任何信号集 \left\{ s_i\left( t \right) \right\} \left( i=1,\cdots ,M \right) 都可以表示成一些基本函数集 \left\{ \psi _j\left( t \right) \right\} \left( j=1,\cdots ,N \right) \quad N\leqslant M
任何信号集{si(t)}(i=1,⋯,M)都可以表示成一些基本函数集{ψj(t)}(j=1,⋯,N)N⩽M由此,图 4.7a 所示的一组
M
M
M 级参考信号集为
{
s
i
(
t
)
}
(
i
=
1
,
⋯
,
M
)
\left\{ s_i\left( t \right) \right\} \left( i=1,\cdots ,M \right)
{si(t)}(i=1,⋯,M) 的相关器可由
N
N
N 级参考信号集为
{
ψ
j
(
t
)
}
(
j
=
1
,
⋯
,
N
)
\left\{ \psi _j\left( t \right) \right\} \left( j=1,\cdots ,N \right)
{ψj(t)}(j=1,⋯,N) 的相关器替代,如图 4.7b 所示。此接收器的判决级由选择信号
s
i
(
t
)
s_i\left( t \right)
si(t) 的逻辑电路组成。
s
i
(
t
)
s_i\left( t \right)
si(t) 的选取,是根据系数
a
i
j
a_{ij}
aij 与输出信号集
z
i
(
T
)
z_i\left( T \right)
zi(T) 之间的最佳匹配。
- 若波形集 { s i ( t ) } \left\{ s_i\left( t \right) \right\} {si(t)} 是正交的,则图 4.7a 中接收器的实现完全等同于图 4.7b 中的实现( 差别可能仅仅在于比例因子)。
- 若 { s i ( t ) } \left\{ s_i\left( t \right) \right\} {si(t)}不是正交信号集,则图 4.7b 采用同参考信号 { ψ j ( t ) } \left\{ \psi _j\left( t \right) \right\} {ψj(t)} 有关的 N N N 个相关器替代 M M M 个相关器,是最有效的实现方式,在 4.3 小节中将把它运用在多相相移键控(MPSK)信号的检测上。
在二进制信号检测中,相关接收器可以设计成单独的匹配滤波器或乘法积分器,如图 4.8a 所示,参考信号为二进制发送信号之差
s
1
(
t
)
−
s
2
(
t
)
s_1\left( t \right) -s_2\left( t \right)
s1(t)−s2(t),相关器的输出
z
(
T
)
z\left( T \right)
z(T) 直接输入到判决级。

对于二进制检测,相关接收器也可以设计成两个匹配滤波器或者乘法积分器的形式,一个用于匹配
s
1
(
t
)
s_1\left( t \right)
s1(t),另一个用于匹配
s
2
(
t
)
s_2\left( t \right)
s2(t),如图 4.8b。判决级的设计须遵守判决准则,将相关器的输出
z
i
(
T
)
(
i
=
1
,
2
)
z_i\left( T \right)\left( i=1,2 \right)
zi(T)(i=1,2) 进行差运算:
z
(
T
)
=
z
1
(
T
)
−
z
2
(
T
)
z\left( T \right) =z_1\left( T \right) -z_2\left( T \right)
z(T)=z1(T)−z2(T)如图 4.8b所示。
z
(
T
)
z\left( T \right)
z(T) 称为检验统计量(test statistic),同前面单个相关器实现时的情况一样,将它输入到判决级。
-
在没有噪声的情况下(absence of noise),输入波形 s i ( t ) s_i\left( t \right) si(t) 产生输出 z ( T ) = a i ( T ) z\left( T \right) =a_i\left( T \right) z(T)=ai(T),它仅包含信号分量。
-
在有噪声的情况下,输入噪声 n ( T ) n\left( T \right) n(T) 是高斯随机过程,由于相关器是线性器件,因此,输出仍然为高斯随机过程。这样,在 t = T t= T t=T 时刻对相关器输出进行采样得到
z ( T ) = a i ( T ) + n 0 ( t ) i = 1 , 2 z\left( T \right) =a_i\left( T \right) +n_0\left( t \right) \quad i=1,2 z(T)=ai(T)+n0(t)i=1,2其中, n 0 ( t ) n_0\left( t \right) n0(t) 是噪声分量,是零均值高斯随机变量; z ( T ) z\left( T \right) z(T) 是均值为 a 1 a_1 a1 或 a 2 a_2 a2 的高斯随机变量,取决于发送信号是二进制0还是二进制1。
3.2.1 二进制判决门限
图 4.9 画出了随机变量
z
(
T
)
z\left( T \right)
z(T) 的两个条件概率密度(pdf)函数
p
(
z
∣
s
1
)
p\left(z\mid s_1\right)
p(z∣s1) 和
p
(
z
∣
s
2
)
p\left(z\mid s_2\right)
p(z∣s2),其均值分别为
a
1
a_1
a1 和
a
2
a_2
a2。这两个 pdf 分别称为
s
1
s_1
s1 和
s
2
s_2
s2 的似然函数,这在《Part 3——基带信号解调与检测》的 1.2 小节中介绍过,下面重新写出其表达式:
p
(
z
∣
s
1
)
=
1
σ
0
2
π
exp
[
−
1
2
(
z
−
a
1
σ
0
)
2
]
p\left( z\mid s_1 \right) =\frac{1}{\sigma _0\sqrt{2\pi}}\exp \left[ -\frac{1}{2}\left( \frac{z-a_1}{\sigma _0} \right) ^2 \right]
p(z∣s1)=σ02π1exp[−21(σ0z−a1)2]和
p
(
z
∣
s
2
)
=
1
σ
0
2
π
exp
[
−
1
2
(
z
−
a
2
σ
0
)
2
]
p\left( z\mid s_2 \right) =\frac{1}{\sigma _0\sqrt{2\pi}}\exp \left[ -\frac{1}{2}\left( \frac{z-a_2}{\sigma _0} \right) ^2 \right]
p(z∣s2)=σ02π1exp[−21(σ0z−a2)2]其中,
σ
0
2
\sigma_0^2
σ02 是噪声变量。图 4.9 中,
- 最右面的似然函数 p ( z ∣ s 1 ) p\left( z\mid s_1 \right) p(z∣s1) 表示已知发送信号为 s 1 ( t ) s_1\left( t \right) s1(t) 时,检测输出 z ( T ) z\left( T \right) z(T) 的概率密度函数;
- 最左面的似然函数 p ( z ∣ s 2 ) p\left( z\mid s_2 \right) p(z∣s2) 表示已知发送信号为 s 2 ( t ) s_2\left( t \right) s2(t) 时,检测输出 z ( T ) z\left( T \right) z(T) 的概率密度函数。
z
(
T
)
z\left( T \right)
z(T) 的横坐标表示图 4.8 中的相关接收器输出样值的所有可能的取值范围。

关于最优化二进制判决门限值,用于确定接收信号的区域的问题,在 《Part 3——基带信号解调与检测》的 2.1 小节中提到了用于高斯噪声条件下,等概二进制信号的最小错误(minimum error)准则。表达式如下:
z
(
T
)
≷
H
1
H
2
a
1
+
a
2
2
=
γ
0
z\left( T \right)\underset{H_2}{\overset{H_1}{\gtrless}} \frac{a_1+a_2}{2}=\gamma_0
z(T)H2≷H12a1+a2=γ0
- 当发送信号为 s 1 ( t ) s_1\left( t \right) s1(t) 时, a 1 a_1 a1 为 z ( T ) z\left( T \right) z(T) 的信号分量;
- 当发送信号为 s 2 ( t ) s_2\left( t \right) s2(t) 时, a 2 a_2 a2 为 z ( T ) z\left( T \right) z(T) 的信号分量。
门限值 γ 0 \gamma_0 γ0 取 a 1 + a 2 2 \dfrac{a_1+a_2}{2} 2a1+a2 , 可以使得等概信号的错误判决概率最小。根据如上式的判决准则,
- 如果 z ( T ) > γ 0 z\left( T \right) > \gamma_0 z(T)>γ0,则应当选择假定值 H 1 H_1 H1 ( 等效于判决发送信号为 s 1 ( t ) s_1\left( t \right) s1(t));
- 如果 z ( T ) < γ 0 z\left( T \right) < \gamma_0 z(T)<γ0,则应当选择假定值 H 2 H_2 H2(等效于判决发送信号为 s 2 ( t ) s_2\left( t \right) s2(t));
- 如果 z ( T ) = γ 0 z\left( T \right) = \gamma_0 z(T)=γ0,则判决可以选择其中的任意一个。
对于等能量、等概且极性相反的信号,有
s
1
(
t
)
=
−
s
2
(
t
)
s_1\left( t \right)=-s_2\left( t \right)
s1(t)=−s2(t) 及
a
1
=
−
a
2
a_1 = -a_2
a1=−a2,则最优化判决准则变为
z
(
T
)
≷
H
1
H
2
0
z\left( T \right)\underset{H_2}{\overset{H_1}{\gtrless}} \ 0
z(T)H2≷H1 0或
判
决
为
s
1
(
t
)
,
z
1
(
T
)
>
z
2
(
T
)
判
决
为
s
2
(
t
)
,
otherwise
\begin{aligned} &判决为s_1\left( t \right), &&z_1\left( T \right)>z_2\left( T \right) \\ &判决为s_2\left( t \right), &&\text{otherwise} \end{aligned}
判决为s1(t),判决为s2(t),z1(T)>z2(T)otherwise
4. 相干检测
4.1 PSK 的相干检测
图 4.7 所示的检测器可以用于任何数字波形的相干检测,这种检测器通常称为最大似然检测器(maximum likelihood detector)。考虑二进制 PSK(BPSK)的例子,设
s
1
(
t
)
=
2
E
T
cos
(
ω
0
t
+
φ
)
0
⩽
t
⩽
T
s_1\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left( \omega _0t+\varphi \right) \quad 0\leqslant t\leqslant T
s1(t)=T2Ecos(ω0t+φ)0⩽t⩽T
s
1
(
t
)
=
2
E
T
cos
(
ω
0
t
+
φ
+
π
)
=
−
2
E
T
cos
(
ω
0
t
+
φ
)
0
⩽
t
⩽
T
s_1\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left( \omega _0t+\varphi +\pi \right) =-\sqrt{\frac{2E}{T}}\cos \left( \omega _0t+\varphi \right) \quad 0\leqslant t\leqslant T
s1(t)=T2Ecos(ω0t+φ+π)=−T2Ecos(ω0t+φ)0⩽t⩽T且
n
(
t
)
=
零
均
值
高
斯
白
随
机
过
程
n\left( t \right) = 零均值高斯白随机过程
n(t)=零均值高斯白随机过程其中,相位
φ
\varphi
φ 为任意常量,因此设定
φ
=
0
\varphi = 0
φ=0 不会影响分析结果。参数
E
E
E 是单位码元的能量,
T
T
T 是码元周期。对于极性相反的特例,只需要一个基函数。如果假定满足《Part 3——基带信号解调与检测》的 1.3 小节提出的正交信号空间(即
K
j
=
1
K_j=1
Kj=1),其基函数
ψ
1
(
t
)
\psi _1\left( t \right)
ψ1(t) 可表示为
ψ
1
(
t
)
=
2
T
cos
ω
0
t
0
⩽
t
⩽
T
\psi _1\left( t \right) =\sqrt{\frac{2}{T}}\cos \omega _0t \quad 0\leqslant t\leqslant T
ψ1(t)=T2cosω0t0⩽t⩽T因此,可以根据
ψ
1
(
t
)
\psi _1\left( t \right)
ψ1(t) 和系数
a
i
1
(
t
)
a _{i1}\left( t \right)
ai1(t) 来表示发送信号
s
i
(
t
)
s_i\left( t \right)
si(t):
s
i
(
t
)
=
a
i
1
ψ
1
(
t
)
s
1
(
t
)
=
a
11
ψ
1
(
t
)
=
E
ψ
1
(
t
)
s
2
(
t
)
=
a
21
ψ
(
t
)
=
−
E
ψ
1
(
t
)
\begin{aligned} &s_i\left( t \right) =a_{i1}\psi _1\left( t \right) \\ &s_1\left( t \right) =a_{11}\psi _1\left( t \right) =\sqrt{E}\psi _1\left( t \right) \\ &s_2\left( t \right) =a_{21}\psi \left( t \right) =-\sqrt{E}\psi _1\left( t \right) \end{aligned}
si(t)=ai1ψ1(t)s1(t)=a11ψ1(t)=Eψ1(t)s2(t)=a21ψ(t)=−Eψ1(t)假定发送信号为
s
1
(
t
)
s_1\left( t \right)
s1(t)。则在参考信号
ψ
1
(
t
)
\psi _1\left( t \right)
ψ1(t) 下,图 4.7b 中的乘法积分器的输出期望值为
E
{
z
1
∣
s
1
}
=
E
{
∫
0
T
[
E
ψ
1
2
(
t
)
+
n
(
t
)
ψ
1
(
t
)
]
d
t
}
E
{
z
z
∣
s
1
}
=
E
{
∫
0
T
[
−
E
ψ
1
2
(
t
)
+
n
(
t
)
ψ
1
(
t
)
]
d
t
}
E
{
z
1
∣
s
1
}
=
E
{
∫
0
T
[
2
T
E
cos
2
ω
0
t
+
n
(
t
)
2
T
cos
ω
0
t
]
d
t
}
=
E
E
{
z
2
∣
s
1
}
=
E
{
∫
0
T
[
−
2
T
E
cos
2
ω
0
t
+
n
(
t
)
2
T
cos
ω
0
t
]
d
t
}
=
−
E
\begin{aligned} &\mathbf{E}\left\{ z_1 \mid s_1 \right\} =\mathbf{E}\left\{ \int_0^T{\left[ \sqrt{E}\psi _{1}^{2}\left( t \right) +n\left( t \right) \psi _1\left( t \right) \right] \text{d}t} \right\} \\ &\mathbf{E}\left\{ z_z \mid s_1 \right\} =\mathbf{E}\left\{ \int_0^T{\left[ -\sqrt{E}\psi _{1}^{2}\left( t \right) +n\left( t \right) \psi _1\left( t \right) \right] \text{d}t} \right\} \\ &\mathbf{E}\left\{ z_1 \mid s_1 \right\} =\mathbf{E}\left\{ \int_0^T{\left[ \frac{2}{T}\sqrt{E}\cos ^2\omega _0t+n\left( t \right) \sqrt{\frac{2}{T}}\cos \omega _0t \right] \text{d}t} \right\} =\sqrt{E} \\ &\mathbf{E}\left\{ z_2 \mid s_1 \right\} =\mathbf{E}\left\{ \int_0^T{\left[ -\frac{2}{T}\sqrt{E}\cos ^2\omega _0t+n\left( t \right) \sqrt{\frac{2}{T}}\cos \omega _0t \right] \text{d}t} \right\} =-\sqrt{E} \end{aligned}
E{z1∣s1}=E{∫0T[Eψ12(t)+n(t)ψ1(t)]dt}E{zz∣s1}=E{∫0T[−Eψ12(t)+n(t)ψ1(t)]dt}E{z1∣s1}=E{∫0T[T2Ecos2ω0t+n(t)T2cosω0t]dt}=EE{z2∣s1}=E{∫0T[−T2Ecos2ω0t+n(t)T2cosω0t]dt}=−E其中,
E
{
⋅
}
\mathbf{E}\left\{\ \cdot \ \right\}
E{ ⋅ } 表示集总平均,也称为期望值(expected value)。上述后两式成立是因为
E
{
n
(
t
)
}
=
0
\mathbf{E}\left\{ n\left( t \right) \right\} =0
E{n(t)}=0。判决级通过确定接收信号所在的信号空间来判决发送信号。该例中,选择
ψ
1
(
t
)
=
2
T
\psi _1\left( t \right)=\sqrt{\dfrac{2}{T}}
ψ1(t)=T2 将
E
{
z
i
(
T
)
}
\mathbf{E}\left\{ z_i\left( T \right) \right\}
E{zi(T)} 归一化为
±
E
\pm\sqrt{E}
±E 。除了归一化比例因子外,原型信号
s
i
(
t
)
s_i\left( t \right)
si(t) 与参考信号
{
ψ
j
(
t
)
}
\left\{ \psi _j\left( t \right) \right\}
{ψj(t)} 是相同的。判决级选择具有最大
z
i
(
T
)
z_i\left( T \right)
zi(T) 值的信号。因此,在此例中接收信号判决为
s
1
(
t
)
s_1\left( t \right)
s1(t)。对 BPSK 系统进行这种相干检测的差错性能,将在 7.1 小节进行讨论。
4.2 采样匹配滤波器
在《Part 3——基带信号解调与检测》的 2.2 小节中讨论了匹配滤波器的基本特征,即其冲激响应是输入信号波形镜像(绕
t
=
0
t=0
t=0 轴翻转)的延迟。因此,如果信号波形为
s
(
t
)
s\left( t \right)
s(t),则其镜像为
s
(
−
t
)
s\left( -t \right)
s(−t),延迟
T
T
T 秒后是
s
(
T
−
t
)
s\left( T-t \right)
s(T−t)。与
s
(
t
)
s\left( t \right)
s(t) 匹配的滤波器冲激响应
h
(
t
)
h\left( t \right)
h(t) 为
h
(
t
)
=
{
s
(
T
−
t
)
,
0
⩽
t
⩽
T
0
,
otherwise
h\left( t \right)=\begin{cases}\begin{aligned} &s\left( T-t\right),&&0\leqslant t \leqslant T \\ &0,&&\text{otherwise} \end{aligned}\end{cases}
h(t)={s(T−t),0,0⩽t⩽Totherwise 图 4.7 和 4.8 表明自相关器的基本功能,是将接收到的含噪声信号和每个待选参考信号做乘法积分运算以确定最好的匹配。这几幅简图暗示使用的是模拟硬件(乘法器和积分器)以及连续信号,而并没有表明相关器或匹配滤波器(MF)可以通过数字技术和采样波形来实现。图 4.10 展示了如何用数字硬件来实现 MF。输入信号
r
(
t
)
r\left( t \right)
r(t) 等于发送信号
s
i
(
t
)
s_i\left( t \right)
si(t) 与噪声
n
(
t
)
n\left( t \right)
n(t) 之和,信号带宽为
W
=
1
2
T
W=\dfrac{1}{2T}
W=2T1,这里
T
T
T 是码元持续时间。这样,最小奈奎斯特采样速率为
f
s
=
2
W
=
1
T
f_s = 2W= \dfrac1T
fs=2W=T1,且采样间隔
T
s
T_s
Ts 必须等于或小于码元间隔。换言之,每个码元必须有一个采样点。在实际系统中,这种采样通常以超过奈奎斯特最小速率的 4 倍或更多倍速率进行。唯一的代价是处理器的速度,而不是传输带宽。在采样时刻
t
=
k
T
s
t=kT_s
t=kTs,采样点转移到寄存器中(如图 4.10a),前面的采样点则依次右移一位。当接收信号进行采样时,连续时间
t
t
t 转变成
k
T
s
kT_s
kTs,或简化成
k
k
k,可以用离散时间符号表示:
r
(
k
)
=
s
i
(
k
)
+
n
(
k
)
i
=
1
,
2
k
=
0
,
1
,
⋯
r\left( k \right) =s_i\left( k \right) +n\left( k \right) \quad i=1,2 \quad k=0,1,\cdots
r(k)=si(k)+n(k)i=1,2k=0,1,⋯其中,
i
i
i 是
M
M
M 进制信号中区别不同码元的下标,
k
k
k 是采样时刻序号。在图 4.10 中,具有系数或加权
c
i
(
n
)
c_i\left( n \right)
ci(n) 的移位寄存器近似为一个 MF,其中
n
=
0
,
⋯
,
N
−
1
n =0 ,\cdots, N-1
n=0,⋯,N−1 是加权时刻的序号或寄存器的级数。此例中,
N
=
4
N=4
N=4 表示寄存器为 4 级和每个码元采样 4 次。因此,图中在时刻
n
=
0
n=0
n=0 到
n
=
3
n=3
n=3 对采样值求和,求和之后,即 4 个采样点均进入寄存器之后就可以对码元进行判决。注意,为简便起见,图 4.10b 所用的例子对
s
i
(
k
)
s_i\left( k \right)
si(k) 采样只有 3 个幅度值(
0
,
±
1
0,\pm 1
0,±1)。实际系统中,每个采样(权值)会有 6~10 比特,其位数取决于信号星座的密度。滤波器权值集合
{
c
i
(
n
)
}
\left\{ c_i\left( n \right) \right\}
{ci(n)} 构成了滤波器冲激响应, 与信号采样点匹配的权值对应关系为
c
i
(
n
)
=
s
i
[
(
N
−
1
)
−
n
]
=
s
i
(
3
−
n
)
c_i\left( n \right) =s_i\left[ \left( N-1 \right) -n \right] =s_i\left( 3-n \right)
ci(n)=si[(N−1)−n]=si(3−n)由离散形式卷积积分,某个时刻对应于第
k
k
k 个采样点的输出表示式为
z
i
(
k
)
=
∑
n
=
0
N
−
1
r
(
k
−
n
)
c
i
(
n
)
k
=
0
,
1
,
⋯
,
模
N
z_i\left( k \right) =\sum_{n=0}^{N-1}{r\left( k-n \right) c_i\left( n \right)} \quad k=0,1,\cdots ,模N
zi(k)=n=0∑N−1r(k−n)ci(n)k=0,1,⋯,模N其中,
x
模
y
x 模 y
x模y 定义为
x
x
x 除以
y
y
y 的余数,
k
k
k 表示接收信号采样时刻和滤波器输出时刻,
n
n
n 是伪时间变量。
- 在 r ( k − n ) r\left( k-n \right) r(k−n)中,可以将 n n n 看做采样的“年龄”(停留在滤波器中的时间长度);
- 在 c i ( n ) c_i\left( n \right) ci(n) 中,可将 n n n 看做权值的地址。
由于假定系统是同步的,因而码元的定时是已知的。同样,假定噪声是零均值的,这样接收信号的采样期望值为
E
{
r
(
k
)
}
=
s
i
(
k
)
i
=
1
,
2
\mathbf{E}\left\{ r\left( k \right) \right\} =s_i\left( k \right) \quad i=1,2
E{r(k)}=si(k)i=1,2因此如果发送信号为
s
i
(
t
)
s_i\left( t \right)
si(t),则匹配滤波器的期望输出为
E
{
z
i
(
k
)
}
=
∑
n
=
0
N
−
1
s
i
(
k
−
n
)
c
i
(
n
)
k
=
0
,
1
,
⋯
,
模
N
\mathbf{E}\left\{ z_i\left( k \right) \right\} =\sum_{n=0}^{N-1}{s_i\left( k-n \right) c_i\left( n \right)} \quad k=0,1,\cdots ,模N
E{zi(k)}=n=0∑N−1si(k−n)ci(n)k=0,1,⋯,模N图 4.10b 为发送信号随时间变化的函数,可以看到
s
1
(
t
)
s_1\left( t \right)
s1(t) 最左边的样值(幅度为
+
1
+ 1
+1)是
k
=
0
k=0
k=0 时刻即最早的采样值。假定发送信号为
s
1
(
t
)
s_1\left( t \right)
s1(t),为简化表示,忽略噪声,这意味着接收信号采样
r
(
k
)
r \left( k \right)
r(k) 就等于
s
1
(
t
)
s_1\left( t \right)
s1(t)。当采样点填满了 MF 的寄存器,在每个码元结束时刻,
k
=
0
k=0
k=0 的采样值将置于寄存器的最右端。从上述
z
i
(
k
)
z_i\left( k \right)
zi(k) 和
E
{
z
i
(
k
)
}
\mathbf{E}\left\{ z_i\left( k \right) \right\}
E{zi(k)} 的表达式注意到,参考权值时间下标
n
n
n 与采样时间下标
k
−
n
k-n
k−n 相比,顺序发生了逆转,这正是卷积积分器的一个重要特点。事实上,最早时刻的采样对应于最右端的权值保证了相关有意义。即使我们将 MF 的数学运算描述成信号同滤波器冲激响应的卷积, 最终结果也是表现为同样两个信号的相关。这就是可以有效地将相关器描述成匹配滤波器实现的原因。

图 4.10b 中,检测器通常采用 MF。对于二进制判决,在对应于码元结束时刻
k
=
N
−
1
k=N-1
k=N−1 处验证
z
i
(
k
)
z_i\left( k \right)
zi(k)。在发送信号为
s
1
(
k
)
s_1\left( k \right)
s1(k) 且忽略噪声的情况下,通过上述结论,可将时刻
k
=
N
−
1
=
3
k=N-1=3
k=N−1=3 的相关输出表示为
z
1
(
k
=
3
)
=
∑
n
=
0
3
s
1
(
3
−
n
)
c
1
(
n
)
=
2
z_1\left( k=3 \right) =\sum_{n=0}^3{s_1\left( 3-n \right) c_1\left( n \right)}=2
z1(k=3)=n=0∑3s1(3−n)c1(n)=2及
z
2
(
k
=
3
)
=
∑
n
=
0
3
s
1
(
3
−
n
)
c
2
(
n
)
=
−
2
z_2\left( k=3 \right) =\sum_{n=0}^3{s_1\left( 3-n \right) c_2\left( n \right)}=-2
z2(k=3)=n=0∑3s1(3−n)c2(n)=−2由于
z
1
(
k
=
3
)
z_1\left( k=3 \right)
z1(k=3) 大于
z
2
(
k
=
3
)
z_2\left( k=3 \right)
z2(k=3),检测器选择
s
1
(
t
)
s_1\left( t \right)
s1(t) 作为发送码元。
那么,图 4.10b 的 MF 和图 4.8 的相关器到底有什么区别呢?对于 MF,每个新到达的输入采样值均可得到一个新的输出值,因此其输出为一时间序列,这可以从图 3.7b 所示的 MF 输出看出(一连串输入与正弦波形相关的正值与负值)。这样的 MF 输出序列等同于在输入时间序列不同的开始时刻几个相关器的运算值。注意,一个相关器在每个码元时刻只能计算一个输出值,即为图 3.7b 所示的时刻 T T T 时的信号峰值。如果 MF 和相关器的定时准确,则它们在码元结束时刻的输出是完全等同的。MF 和相关器有—个重要的差别,即由于相关器在每个码元期间都会得到单独的输出值,所以肯定会有边信息(side information),例如乘积积分基于码元的开始和结束时刻。假如相关器定时错误,则输入到检测器的输出样值会发生严重错误。另一方面,MF 得到一时间序列的输出值(反映在随时间变化的输入样值与固定权值的乘积上),通过辅助电路,可以获得对 MF 输出进行采样的最佳时刻。
4.3 多相相移键控的相干检测
图 4.11 画出了多相相移键控(MPSK)信号集的信号空间,该图描述的是 4 相 PSK 或者称为 QPSK(
M
=
4
M=4
M=4)。在发送端, 每个码元间隔内同时发送两个二进制位,这两个连续的二进制位指明调制器须产生 4 个波形中的一个。对于典型的相干
M
M
M 进制 PSK(MPSK)系统,
s
i
(
t
)
s_i\left( t \right)
si(t) 可以表示为
s
i
(
t
)
=
2
E
i
T
cos
[
ω
0
t
−
2
π
i
M
]
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E_i}{T}}\cos \left[ \omega _0t - \frac{2\pi i}{M}\right]\quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Eicos[ω0t−M2πi]0⩽t⩽Ti=1,⋯,M其中,
E
E
E 为每个码元间隔
T
T
T 内接收到信号波形的能量,
ω
0
\omega_0
ω0 是载波角频率。如果信号空间满足 《Part 3——基带信号解调与检测》的 1.3 小节提出的正交条件, 则可以选取更为方便的坐标集,如
ψ
1
(
t
)
=
2
T
cos
ω
0
t
\psi _1\left( t \right) =\sqrt{\frac{2}{T}}\cos \omega _0t
ψ1(t)=T2cosω0t及
ψ
2
(
t
)
=
2
T
sin
ω
0
t
\psi _2\left( t \right) =\sqrt{\frac{2}{T}}\sin \omega _0t
ψ2(t)=T2sinω0t同 4.1 小节一样,为了归一化检测器的期望输出,式中幅度取为
2
T
\sqrt{\dfrac{2}{T}}
T2。这样根据标准正交坐标系,
s
i
(
t
)
s_i\left( t \right)
si(t)可以写成
s
i
(
t
)
=
a
i
1
ψ
1
(
t
)
+
a
i
2
ψ
2
(
t
)
=
E
cos
(
2
π
i
M
)
ψ
1
(
t
)
+
E
sin
(
2
π
i
M
)
ψ
2
(
t
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
\begin{aligned} s_i\left( t \right) &=a_{i1}\psi _1\left( t \right) +a_{i2}\psi _2\left( t \right) \\ &=\sqrt{E}\cos \left( \frac{2\pi i}{M} \right) \psi _1\left( t \right) +\sqrt{E}\sin \left( \frac{2\pi i}{M} \right) \psi _2\left( t \right) \quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array} \end{aligned}
si(t)=ai1ψ1(t)+ai2ψ2(t)=Ecos(M2πi)ψ1(t)+Esin(M2πi)ψ2(t)0⩽t⩽Ti=1,⋯,M
需要说明的是,上述表达式表示的 M M M 进制相位波形集(本质上是非正交的)仅仅只有两个正交的载波分量。从某种意义上说,MPSK 信号集中, M = 4 M=4 M=4 的例子非常特殊,因为 QPSK 的波形集可由极性相反的正交函数组合来表示。判决边界把信号空间分成 M = 4 M=4 M=4 个区域,其构建过程与 3.1 小节中图 4.6 的 M = 2 M= 2 M=2 情况相似。检测器的判决规则为(见图 4.11):
- 如果接收信号矢量落在区域 1 内,则判定发送信号为 s 1 ( t ) s_1\left( t \right) s1(t);
- 如果接收信号矢量落在区域 2 内,则判定发送信号为 s 2 ( t ) s_2\left( t \right) s2(t);
- ……
换言之,该判决规则就是如果 z i ( T ) z_i\left( T \right) zi(T) 是最大的相关器输出则判为第 1 个波形(见图 4.7)。
图 4.7a 所示的相关器的形式表明,MPSK 信号的解调总要使用
M
M
M 个乘积相关器。此图表明,
M
M
M 条支路中的每一条都要求参考信号有合适相位偏移。实际应用中采用图 4.7b 实现 MPSK 解调器,它不需要考虑信号集
M
M
M 的大小,仅仅需要
N
=
2
N= 2
N=2 个乘法积分器。由于任何可积分的波形集都可以表示成正交波形的线性组合形式,因此带来了实现上的简便性,如《Part 3——基带信号解调与检测》的 1.3 小节所述。图 4.12 画出了解调器的实现框图,结合本节前述各式,可表示出接收信号为
r
(
t
)
=
2
E
T
(
cos
φ
i
cos
ω
0
t
+
sin
φ
i
sin
ω
0
t
)
+
n
(
t
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
r\left( t \right) =\sqrt{\frac{2E}{T}}\left( \cos \varphi _i\cos \omega _0t+\sin \varphi _i\sin \omega _0t \right) +n\left( t \right) \quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
r(t)=T2E(cosφicosω0t+sinφisinω0t)+n(t)0⩽t⩽Ti=1,⋯,M其中,
φ
=
2
π
i
M
\varphi = \dfrac{2\pi i}{M}
φ=M2πi,
n
(
t
)
n\left( t \right)
n(t) 是零均值高斯白噪声过程。注意在图 4.12 中,仅仅只有两个参考信号波形(基本函数), 上面的相关器参考信号为
ψ
1
(
t
)
=
2
T
cos
ω
0
t
\psi _1\left( t \right) \text{=}\sqrt{\dfrac{2}{T}}\cos \omega _0t
ψ1(t)=T2cosω0t,下面的相关器参考信号为
ψ
2
(
t
)
=
2
T
sin
ω
0
t
\psi _2\left( t \right) \text{=}\sqrt{\dfrac{2}{T}}\sin \omega _0t
ψ2(t)=T2sinω0t。计算上面支路相关器:
X
=
∫
0
T
r
(
t
)
ψ
1
(
t
)
d
t
X=\int_0^T{r\left( t \right) \psi _1\left( t \right) \text{d}t}
X=∫0Tr(t)ψ1(t)dt计算下面支路相关器:
Y
=
∫
0
T
r
(
t
)
ψ
2
(
t
)
d
t
Y=\int_0^T{r\left( t \right) \psi _2\left( t \right) \text{d}t}
Y=∫0Tr(t)ψ2(t)dt
从图 4.13 中可以看出,通过计算
arctan
Y
X
\arctan\dfrac{Y}{X}
arctanXY 可得到接收信号的相角
φ
^
\hat{\varphi}
φ^,其中
X
X
X 是接收信号的同相分量,
Y
Y
Y 是接收信号的正交分量,
φ
^
\hat{\varphi}
φ^ 是发送信号的
φ
i
\varphi_i
φi 的噪声估计。换言之,图 4.12 上支路的相关器产生输出
X
X
X,
X
X
X 是矢量
r
\mathbf{r}
r 的同相投影的幅度,下支路的相关器产生输出
Y
Y
Y,
Y
Y
Y 是矢量
r
\mathbf{r}
r 的正交投影的幅度,此处
r
\mathbf{r}
r 是
r
(
t
)
r\left( t \right)
r(t) 的矢量表示。将
X
X
X 和
Y
Y
Y 输入到标有
arctan
Y
X
\arctan\dfrac{Y}{X}
arctanXY 的方框中,区别于发射信号相角
φ
i
\varphi_i
φi,方框输出的相角值为
φ
^
\hat{\varphi}
φ^,解调器将选择最接近
φ
^
\hat{\varphi}
φ^ 的
φ
i
\varphi_i
φi。也就是说,解调器会对每个
φ
i
\varphi_i
φi 计算
∣
φ
i
−
φ
^
∣
\left| \varphi _i-\hat{\varphi} \right|
∣φi−φ^∣ 值,选取最小输出的
φ
i
\varphi_i
φi。

4.4 FSK 的相干检测
FSK 调制可以由包含在载波频率中的信息来描述,典型的 FSK 信号波形集可以表示为
s
i
(
t
)
=
2
E
T
cos
(
ω
i
t
+
φ
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left( \omega _it+\varphi \right) \quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Ecos(ωit+φ)0⩽t⩽Ti=1,⋯,M
E
E
E 是每个码元周期
T
T
T 内
s
i
(
t
)
s_i\left( t \right)
si(t) 的能量,假定
(
ω
i
+
1
−
ω
i
)
\left( \omega _{i+1}-\omega _i \right)
(ωi+1−ωi) 是
π
T
\dfrac{\pi}{T}
Tπ 的整数倍。相位
φ
\varphi
φ 是任意常数,因此可设为 0。假定基本函数集
{
ψ
j
(
t
)
}
(
j
=
1
,
⋯
,
N
)
\left\{ \psi _j\left( t \right) \right\} \left( j=1,\cdots ,N \right)
{ψj(t)}(j=1,⋯,N) 是正交集,
{
ψ
j
(
t
)
}
\left\{ \psi _j\left( t \right) \right\}
{ψj(t)} 最常用的形式是
ψ
j
(
t
)
=
2
T
cos
ω
j
t
j
=
1
,
⋯
,
M
\psi _j\left( t \right) =\sqrt{\frac{2}{T}}\cos \omega _jt \quad j=1,\cdots,M
ψj(t)=T2cosωjtj=1,⋯,M此处同前面一样,令幅度为
2
T
\sqrt{\dfrac{2}{T}}
T2,以归一化匹配滤波器的输出。《Part 3——基带信号解调与检测》的 1.3 小节给出的正交条件,有
a
i
j
=
∫
0
T
2
E
T
cos
ω
i
t
2
T
cos
ω
j
t
d
t
a_{ij}=\int_0^T{\sqrt{\frac{2E}{T}}\cos \omega _it\sqrt{\frac{2}{T}}\cos \omega _jt\text{d}t}
aij=∫0TT2EcosωitT2cosωjtdt因此
a
i
j
=
{
E
,
i
=
j
0
,
otherwise
a_{ij}=\begin{cases}\begin{aligned} &\sqrt{E},&&i=j \\ &0,&&\text{otherwise} \end{aligned}\end{cases}
aij={E,0,i=jotherwise也就是说,第
i
i
i 个发送信号矢量定位在第
i
i
i 个坐标轴上,与信号空间原点的距离为
E
\sqrt{E}
E。该方案中,对于给定
E
E
E 的
M
M
M 进制信号,任意两个信号矢量
s
i
\mathbf{s}_i
si 和
s
j
\mathbf{s}_j
sj 之间的距离为常数:
d
(
s
i
,
s
j
)
=
∥
s
i
−
s
j
∥
=
2
E
i
≠
j
d\left( \mathbf{s}_i,\mathbf{s}_j \right) =\lVert \mathbf{s}_i-\mathbf{s}_j \rVert =2\sqrt{E} \quad i\ne j
d(si,sj)=∥si−sj∥=2Ei=j 图 4.14 描述了对三进制(
M
=
3
M=3
M=3)正交 FSK 信号进行相干检测的信号矢量和判决区域,信号集的大小
M
M
M 可以选为 2 的整数次幕,但是在此例中,
M
M
M 特地选为 3,因为我们希望检测比二进制更大的信号集,但是又希望正交信号空间能够在互相垂直的轴上直观地表示出来。大于 3 显然是不可能的,因为它不能在视觉上反映出相互垂直的概念。在 PSK 中,信号空间分成
M
M
M 个不同的区域,每个区域包含一个发送信号矢量。此例中,因为判决区域是三维的,所以判决边界由直线变成平面。通过最优化判决准则,根据接收信号所在的区域将其判决为对应的发送信号。图 4.14 中,接收信号矢量
r
\mathbf{r}
r 出现在区域 2,用上述的判决规则,检测器将
r
\mathbf{r}
r 判定为信号
s
2
\mathbf{s}_2
s2。由于噪声是高斯随机矢量,因此也有可能
r
\mathbf{r}
r 是由
s
2
\mathbf{s}_2
s2 之外的其他信号产生的。
- 如果发送信号为 s 2 \mathbf{s}_2 s2, r \mathbf{r} r 等于信号和噪声之和,即 s 2 + n a \mathbf{s}_2+\mathbf{n}_a s2+na, 则判决为 s 2 \mathbf{s}_2 s2 是正确的。
- 如果发送信号是 s 3 \mathbf{s}_3 s3, r \mathbf{r} r 仍等于信号与噪声之和,即 s 2 + n b \mathbf{s}_2+\mathbf{n}_b s2+nb,则判决为 s 2 \mathbf{s}_2 s2 就是错误的。
FSK 系统相干检测的误差性能将在 7.3 小节讨论。

5. 非相干检测
5.1 差分 PSK 的检测
差分 PSK(DPSK)的调制解调方式涉及到两个独立的过程:编码过程和检测过程。差分编码(differential encoding)是指对数据以差分的形式进行编码的过程,也就是说,出现 0 还是 1 由当前码元与前一码元的相同或不同来决定。对差分编码 PSK 的差分相干检测(differentially coherent detection)是指不需要接收载波的参考相位而直接进行非相干检测的方案。有时差分编码 PSK 也采用相干检测,这将在 7.2 小节具体讨论。
非相干系统不需要确定到达信号相位的真实值。因此,如果发送波形为
s
i
(
t
)
=
2
E
T
cos
[
ω
0
t
+
θ
i
(
t
)
]
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
s_i\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left[ \omega _0t+\theta_i \left( t\right)\right]\quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
si(t)=T2Ecos[ω0t+θi(t)]0⩽t⩽Ti=1,⋯,M则接收信号可有如下表示:
r
(
t
)
=
2
E
T
cos
[
ω
0
t
+
θ
i
(
t
)
+
α
]
+
n
(
t
)
0
⩽
t
⩽
T
i
=
1
,
⋯
,
M
r\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left[ \omega _0t+\theta _i\left( t \right) +\alpha \right] +n\left( t \right) \quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,\cdots ,M\\ \end{array}
r(t)=T2Ecos[ω0t+θi(t)+α]+n(t)0⩽t⩽Ti=1,⋯,M这里
α
\alpha
α 是任意常数,一般认为是
0
0
0 到
π
\pi
π 之间均匀分布的随机变量,
n
(
t
)
n\left( t \right)
n(t) 是 AWGN 过程。
相干检测运用了匹配滤波器(或等价形式),而对于非相干检测,由于匹配滤波器输出是未知角度
α
\alpha
α 的函数,因此不可能采用这种方案。但是,如果假设
α
\alpha
α 在两个周期(
2
T
2T
2T)之间变化非常缓慢,则两个连续波形
θ
j
(
T
1
)
\theta _j\left( T_1 \right)
θj(T1) 和
θ
k
(
T
2
)
\theta _k\left( T_2 \right)
θk(T2) 之间的相位差与
α
\alpha
α 是独立的,即
[
θ
k
(
T
2
)
+
α
]
−
[
θ
j
(
T
1
)
+
α
]
=
θ
k
(
T
2
)
−
θ
j
(
T
1
)
=
φ
(
T
2
)
\left[ \theta _k\left( T_2 \right) +\alpha \right] -\left[ \theta _j\left( T_1 \right) +\alpha \right] =\theta _k\left( T_2 \right) -\theta _j\left( T_1 \right) =\varphi \left( T_2 \right)
[θk(T2)+α]−[θj(T1)+α]=θk(T2)−θj(T1)=φ(T2) 对 DPSK 进行差分相干检测的基本原理如下:解调器将前一个信号间隔内的载波相位作为相位参考,因为信息的传送是依靠两个连续波形之间的相位差异,所以要使用参考相位需要在发送端对信息进行差分编码。为了发送第
i
i
i 个消息(
i
=
1
,
2
,
⋯
,
M
i=1,2,\cdots,M
i=1,2,⋯,M),当前的信号波形相位必须比前面的波形提前
φ
=
2
π
i
M
\varphi=\dfrac{2\pi i}{M}
φ=M2πi 弧度。一般地,检测器将到来信号与本地产生的波形如
2
T
cos
ω
0
T
\sqrt{\dfrac{2}{T}}\cos \omega_0 T
T2cosω0T 和
2
T
sin
ω
0
T
\sqrt{\dfrac{2}{T}}\sin \omega_0 T
T2sinω0T 进行相关计算得出坐标值,然后检测器测定当前接收信号矢量同前一接收信号矢量之间的角度,如图 4.15 所示。

一般来说,因为信号波形间的相关性导致了 DPSK 中错误的传播(相邻码元之间),所以 DPSK 信号的效率要低于 PSK。造成 PSK 和 DPSK 这种差异的原因是,前者是将接收信号与原始的无噪声干扰的参考信号比较,而后者则是两个含噪信号之间的比较。因此,DPSK 信号的噪声是 PSK 信号噪声的 2 倍,可以推测,DPSK 估计的误码率大约为 PSK 的 2 倍(3 dB),随着信噪比的增加,这种恶化程度也迅速增加。但是性能的损失换来了系统复杂性的降低,DPSK 检测的误差性能将在 7.5 小节中讨论。
5.2 二进制差分 PSK 举例
DPSK 差分相干检测的本质是从码元之间的相位变化推断出相应的数据,由于数据是通过验证差分波形检测出来的,所以发送波形必须首先以差分形式进行编码。图 4.16a 说明的是对二进制信息数据流
m
(
k
)
m\left(k\right)
m(k) 进行差分编码,
k
k
k 是采样时间序号。差分编码(图中第 3 行)开始于比特序列
c
c
c 的第 1 位(
k
=
0
k=0
k=0),第 1 位可随意选择(这里取
1
1
1)。一般地,编码比特序列
c
(
k
)
c\left(k\right)
c(k) 有两种产生方式:
c
(
k
)
=
c
(
k
−
1
)
⊕
m
(
k
)
c\left( k \right) =c\left( k-1 \right) \oplus m\left( k \right)
c(k)=c(k−1)⊕m(k)或
c
(
k
)
=
c
(
k
−
1
)
⊕
m
(
k
)
‾
c\left( k \right) =\overline{c\left( k-1 \right) \oplus m\left( k \right) }
c(k)=c(k−1)⊕m(k)其中,符号
⊕
\oplus
⊕ 表示模 2 相加运算(定义见《Part 2——格式化和基带调制》的 9.3 小节),上划线表示取补。图 4.16a 的差分编码是采用上述第二式获得的。也就是说,如果信息位
m
(
k
)
m\left(k\right)
m(k) 和前一编码位
c
(
k
−
1
)
c\left(k-1\right)
c(k−1) 相同, 则当前编码位
c
(
k
)
c\left(k\right)
c(k) 为 1,否则,
c
(
k
)
c\left(k\right)
c(k) 为 0。第 4 行是将编码比特序列
c
(
k
)
c\left(k\right)
c(k) 转换为相位变化序列
θ
(
k
)
\theta\left(k\right)
θ(k),1 对应
180
°
180\degree
180° 相位变化,0 对应
0
°
0\degree
0° 相位变化。

图 4.16b 以框图形式描绘了二进制 DPSK 检测方案。注意,图 4.7 中解调器本质上是基本的乘法积分器,对于相干 PSK,仍然将接收信号同参考信号做相关运算。区别在于,这里的参考信号仅是经过延迟后的接收信号。换言之,在每个码元时期使接收的码元与前一码元匹配,两者相关或者反相关( 180 ° 180\degree 180° 相移)。
在没有噪声的情况下,让相移序列为 θ ( k ) \theta\left(k\right) θ(k) 的接收信号进入图 4.16b 所示的相关器。
- θ ( k = 1 ) \theta\left(k=1\right) θ(k=1) 与 θ ( k = 0 ) \theta\left(k=0\right) θ(k=0) 匹配,两者具有相同的值 π \pi π,则检测输出的第一位为 m ^ ( k = 1 ) = 1 \hat{m}\left(k=1\right)=1 m^(k=1)=1;
- θ ( k = 2 ) \theta\left(k=2\right) θ(k=2) 与 θ ( k = 1 ) \theta\left(k=1\right) θ(k=1) 匹配,也具有相同的值,因此输出为 m ^ ( k = 2 ) = 1 \hat{m}\left(k=2\right)=1 m^(k=2)=1;
- θ ( k = 3 ) \theta\left(k=3\right) θ(k=3) 与 θ ( k = 2 ) \theta\left(k=2\right) θ(k=2) 匹配, 具有不同的值,因而 m ^ ( k = 3 ) = 0 \hat{m}\left(k=3\right)=0 m^(k=3)=0;
- ……
有一点必须指出,就误差性能而言,图 4.16b 所示的检测器是次最优的。DPSK 最优差分检测器需要参考载波的频率而不是相位。最优差分检测器框图如图 4.16c 所示,其性能在 7.5 小节中讨论。图 4.16c 中,参考信号的复数形式为 2 T e j ω 0 t \sqrt{\dfrac2T}e^{j\omega_0t} T2ejω0t,图中表示了一种正交实现,需要使用 I I I 和 Q Q Q 参考波形(见 6.1 小节)。
5.3 FSK 的非相干检测
在 2.3 小节中给出了 FSK 波形表达式,同样可以采用图 4.7 所示的相关器来实现对 FSK 的非相干检测。但是,在硬件上必须配置能量检测器(energy detector)而不需要相位度量。因此,非相干检测需要的信道分支是相干检测的两倍。图 4.17 表示了如何使用同相信道( I I I)和正交信道( Q Q Q)对二进制 FSK(BFSK)进行非相干解调。
- 上两条支路是用来检测频率为 ω 1 \omega_1 ω1 的信号, I I I 分支的参考信号为 2 T cos ω 1 t \sqrt{\dfrac2T}\cos\omega_1t T2cosω1t, Q Q Q 分支的参考信号为 2 T sin ω 1 t \sqrt{\dfrac2T}\sin\omega_1t T2sinω1t;
- 下两条分支是用来检测频率为 ω 2 \omega_2 ω2 的信号, I I I 分支的参考信号为 2 T cos ω 2 t \sqrt{\dfrac2T}\cos\omega_2t T2cosω2t, Q Q Q 分支的参考信号为 2 T sin ω 2 t \sqrt{\dfrac2T}\sin\omega_2t T2sinω2t。
假设接收信号
r
(
t
)
r\left(t\right)
r(t) 恰好是
cos
ω
1
t
+
n
(
t
)
\cos \omega _1t+n\left( t \right)
cosω1t+n(t) 的形式,即相位正好是 0,这样接收的信号分量与第一条支路的参考信号的频率和相位匹配。如果那样的话,上面支路的乘法积分器具有最大输出,由于参考信号
2
T
sin
ω
1
t
\sqrt{\dfrac2T}\sin\omega_1t
T2sinω1t 与信号分量
r
(
t
)
r\left(t\right)
r(t) 是正交的,第二条支路得到接近 0 的输出(求零均值噪声的积分) 。对于正交信号(见 5.4 小节),由于
ω
2
\omega_2
ω2 的参考信号也与
r
(
t
)
r\left(t\right)
r(t) 的信号分量正交,所以第 3 和第 4 条支路也将得到接近 0 的输出。

现在假定另外一种情况:接收到的信号形式为 sin ω 1 t + n ( t ) \sin \omega _1t+n\left( t \right) sinω1t+n(t)。在这种情况下,图 4.17 所示的第二条支路具有最大的输出,而其他几条支路获得接近为 0 的输出。
在实际情况中,最可能的情况是 r ( t ) r\left(t\right) r(t) 具有形如 cos ( ω 1 t + φ ) + n ( t ) \cos \left( \omega _1t+\varphi \right) +n\left( t \right) cos(ω1t+φ)+n(t) 的形式,也就是说,到来的信号与参考信号 cos ω 1 t \cos\omega_1t cosω1t 和 sin ω 1 t \sin\omega_1t sinω1t 均部分相关。因此对于正交信号的非相关正交接收,信号集上每个待选信号都需要 I I I 和 Q Q Q 分支。图 4.17 的框图中,乘积积分后实行了平方运算以避免出现负值,然后将每一信号类(二进制中为 2), I I I 信道为 z 1 2 z_1^2 z12, Q Q Q 信道为 z 2 2 z_2^2 z22 相加。最后一级检验统计量 z ( T ) z\left(T\right) z(T),根据哪个能量检测器输出最大来判定信号频率为 ω 1 \omega_1 ω1 还是 ω 2 \omega_2 ω2。
非相干 FSK 检测还有另一种实现方式。利用中心频率为
f
i
=
ω
i
2
π
f_i=\dfrac{\omega_i}{2\pi}
fi=2πωi、带宽为
W
f
=
1
T
W_f =\dfrac{1}{T}
Wf=T1 的带通滤波器进行包络检测(envelope detect),如图 4.18 所示。包络检测器由整流器和低通滤波器组成,注意,检测器应当与信号包络而不是与信号本身匹配。定义包络时相位并不重要,因此检测中不使用相位信息。在二进制 FSK 情况下,判决发送信号是 0 还是 1,要根据两个包络检测器中的哪一个在测l量时刻具有最大的幅度值。同样,对于多进制频移键控(MFSK)系统,判决发送波形为
M
M
M 个信号中的哪一个,依据是
M
M
M 个包络检测器哪一个具有最大输出值。

尽管图 4.18 的包络检测器框图看起来比图 4.17 所示的正交接收器更为简单,但由于包络检测器使用了(模拟)滤波器,所以其设计比正交接收器更繁重,开销也更大。正交接收器可以通过数字手段实现,随着大规模集成(LSI)电路的出现,一般更倾向于选择非相干检测。图 4.18 所示的检测器也可以用离散傅里叶变换代替模拟滤波器,这样可以数字化实现,但是这种设计比正交接收器的数字实现仍要复杂。
5.4 非相干正交 FSK 信号需要的频率间隔
经常用正交信号来实现频移键控(FSK),但不是所有的 FSK 信号都是正交的。如何判断一个信号集中的频率分量是取自于正交集的呢?举个例子,有两个频率分量,
f
1
=
10
000
Hz
f_1=10\ 000\text{ Hz}
f1=10 000 Hz 和
f
2
=
11
000
Hz
f_2=11\ 000\text{ Hz}
f2=11 000 Hz,它们互相正交吗?换言之,它们在码元周期
T
T
T 内满足不相关的准则吗?没有足够的信息能得出肯定的结论。如果对于频率为
f
1
f_1
f1 的分量,在频率为
f
2
f_2
f2 处接收器的输出滤波器采样包络为 0 ( 即没有交调失真),则显然
f
1
f_1
f1 和
f
2
f_2
f2 是正交的。为了保证 FSK 信号集中的各频率分量相互正交,必须规定信号集中任意一对频率分量之间的频率间隔是
1
T
\dfrac{1}{T}
T1 的整数倍。在码元周期
T
T
T 秒内接通频率为
f
i
f_i
fi 的分量,得到的 FSK 信号的表达式为
s
i
(
t
)
=
(
cos
2
π
f
1
t
)
rect
(
t
T
)
s_i\left( t \right) =\left( \cos 2\pi f_1t \right) \text{rect}\left( \frac{t}{T} \right)
si(t)=(cos2πf1t)rect(Tt)其中
rect
(
t
T
)
=
{
1
,
−
T
2
⩽
t
⩽
T
2
0
,
∣
t
∣
>
T
2
\text{rect}\left( \frac{t}{T} \right) = \begin{cases}\begin{aligned} &1,&&-\dfrac{T}{2}\leqslant t \leqslant \dfrac{T}{2} \\ &0,&&\left| t \right| > \dfrac{T}{2} \end{aligned}\end{cases}
rect(Tt)=⎩⎪⎪⎨⎪⎪⎧1,0,−2T⩽t⩽2T∣t∣>2T
s
i
(
t
)
s_i\left( t \right)
si(t) 的傅里叶变换为
F
{
s
i
(
t
)
}
=
T
sinc
(
f
−
f
i
)
T
\mathscr{F}\left\{ s_i\left( t \right) \right\} =T\text{sinc}\left( f-f_i \right) T
F{si(t)}=Tsinc(f−fi)T图 4.19 画出了两个分量,其中心频率分别为
f
1
f_1
f1 和
f
2
f_2
f2。

5.4.1 最小频率间隔和带宽
在非相干检测中,为了使与检测频率分量相关的接收滤波器获得最大输出信号值,而相邻的滤波器获得零输出信号值(如图 4.18 的实现),频率分量 1 的频谱峰值必须同频率分量 2 的零点相一致,同样,频率分量 2 的频谱峰值也必须同频率分量 1 的零点相一致。频谱的主瓣到第一个零点的频率差值是要求的最小频率间隔(minimum required spacing)。从图 4.19 可看出,非相干检测最小频率间隔为 1 T Hz \dfrac1T\text{ Hz} T1 Hz。尽管 FSK 信号在每一个码元期间只是发送一个单边带分量,但是在讨论信号带宽时,仍然要把 M M M 进制信号集内所有分量可取得的频率范围合在一块。这样,对于 FSK,需要的带宽同两个分量之间的频率间隔有关。一组相邻的频率分量中,与其中一个频率分量对应的频谱可认为是由频率分量每边的频率间隔的一半组成。如图 4.19 所示的二进制 FSK 例子中, 信号带宽等于中心频率在频率分量两边加上频率间隔的一半所得的频谱,其总和为频率间隔的 2 倍。同样可以推广到 M M M 进制信号, 非相干检测正交 MFSK 带宽等于 M T \dfrac{M}{T} TM。
迄今为止,我们只讨论了非相干检测正交 FSK。进一步,如果信号进行正交检测,它的最小频率间隔(或带宽)可以减小到 1 2 T \dfrac{1}{2T} 2T1。
5.4.2 对偶关系
工程上双重关联性的概念定义如下:如果对于两个过程(函数、元素或者系统),虽然用不同的变量来描述(如时间、频率等),但其数学关系式是完全相同的, 则称这两个过程是对偶(dual)的。在 FSK 信号中,通断的矩形脉冲对应着如图 4.19 所示的 sinc ( f T ) \text{sinc}\left(fT\right) sinc(fT) 形状的频谱分量。在已知的频率分最周期内产生了两个正交频率分量所需的最小频率间隔,这种频域上的关系对应着对偶的时域上的关系,时域上即为脉冲信号,而矩形带宽频谱对应着 sinc ( t T ) \text{sinc}\left(\dfrac{t}{T}\right) sinc(Tt) 波形的脉冲,如图 3.16b 所示。同样,给定带宽可推出脉冲间无码间串扰所需的最小时间间隔。
6. 复包络
用 2.1 小节中的复数概念可以很方便地描述调制和解调,现在继续讨论这个问题。任意实带通波形
s
(
t
)
s\left(t\right)
s(t) 可表示成下面的复数形式:
s
(
t
)
=
ℜ
{
g
(
t
)
e
j
ω
0
t
}
s\left( t \right) =\Re \left\{ g\left( t \right) e^{j\omega _0t} \right\}
s(t)=ℜ{g(t)ejω0t}其中
g
(
t
)
g\left( t \right)
g(t) 是复包络,其表达式为
g
(
t
)
=
x
(
t
)
+
j
y
(
t
)
=
∣
g
(
t
)
∣
e
j
θ
(
t
)
=
R
(
t
)
e
j
θ
(
t
)
g\left( t \right) =x\left( t \right) +jy\left( t \right) =\left| g\left( t \right) \right|e^{j\theta \left( t \right)}=R\left( t \right) e^{j\theta \left( t \right)}
g(t)=x(t)+jy(t)=∣g(t)∣ejθ(t)=R(t)ejθ(t)复包络的幅值为
R
(
t
)
=
∣
g
(
t
)
∣
=
x
2
(
t
)
+
y
2
(
t
)
R\left( t \right) =\left| g\left( t \right) \right|=\sqrt{x^2\left( t \right) +y^2\left( t \right)}
R(t)=∣g(t)∣=x2(t)+y2(t)其相位为
θ
(
t
)
=
arctan
y
(
t
)
x
(
t
)
\theta \left( t \right) =\arctan \frac{y\left( t \right)}{x\left( t \right)}
θ(t)=arctanx(t)y(t)
g
(
t
)
g\left( t \right)
g(t) 是复数形式的基带信息或数据,
e
j
ω
0
t
e^{j\omega _0t}
ejω0t 是载波的复数形式。这两项的乘积就是调制,乘积的实部
s
(
t
)
s\left(t\right)
s(t) 为发送波形。因此,
s
(
t
)
s\left(t\right)
s(t) 可以表示为
s
(
t
)
=
ℜ
{
[
x
(
t
)
+
j
y
(
t
)
]
[
cos
ω
0
t
+
j
sin
ω
0
t
]
}
=
x
(
t
)
cos
ω
0
t
−
y
(
t
)
sin
ω
0
\begin{aligned} s\left( t \right) &=\Re \left\{ \left[ x\left( t \right) +jy\left( t \right) \right] \left[ \cos \omega _0t+j\sin \omega _0t \right] \right\} \\ &=x\left( t \right) \cos \omega _0t-y\left( t \right) \sin \omega _0 \end{aligned}
s(t)=ℜ{[x(t)+jy(t)][cosω0t+jsinω0t]}=x(t)cosω0t−y(t)sinω0
信号调制通常表示成 ( a + j b ) \left( a+jb\right) (a+jb) 乘以 ( c + j d ) \left( c+jd\right) (c+jd) 的形式,得到的波形为 a c − b d ac-bd ac−bd 项的符号反相(即载波的正交分量)。
6.1 调制器的正交实现
考虑基带波形
g
(
t
)
g\left( t \right)
g(t),用离散时刻
k
=
1
,
2
,
⋯
k =1, 2,\cdots
k=1,2,⋯ 的理想脉冲
x
(
t
)
x\left(t\right)
x(t) 和
y
(
t
)
y\left(t\right)
y(t) 来描述。这样,
g
(
t
)
g\left( t \right)
g(t),
x
(
t
)
x\left(t\right)
x(t) 和
y
(
t
)
y\left(t\right)
y(t) 可以分别表示成
g
k
g_k
gk,
x
k
x_k
xk 和
y
k
y_k
yk 的形式。设脉冲幅度为
x
k
=
y
k
=
0.707
A
x_k=y_k = 0.707 A
xk=yk=0.707A,则复包络的离散形式为:
g
k
=
x
k
+
j
y
k
=
0.707
A
+
j
0.707
A
g_k=x_k+jy_k=0.707A+j0.707A
gk=xk+jyk=0.707A+j0.707A 由复数知识可知
j
=
−
1
j=\sqrt{-1}
j=−1,但是从实际应用的观点来看,可以仅把
j
j
j 看成一个标记,对上式中的各项并不能用一般的加法运算。现在把同相调制
x
k
x_k
xk 和正交调制
y
k
y_k
yk 看做一有序对,为下一步做准备。如图 4.20 所示即为正交调制,脉冲
x
k
x_k
xk 乘上
cos
ω
0
t
\cos\omega_0t
cosω0t(载波的同相分量),脉冲
y
k
y_k
yk 乘上
sin
ω
0
t
\sin\omega_0t
sinω0t(载波的正交分量)。调制过程可以简单地看成先把复包络与
e
j
ω
0
t
e^{j\omega_0t}
ejω0t 相乘,然后发送乘积的实部。因此有
s
(
t
)
=
ℜ
{
g
k
e
j
ω
0
t
}
=
ℜ
{
(
x
k
+
j
y
k
)
(
cos
ω
0
t
+
j
sin
ω
0
t
)
}
=
x
k
cos
ω
0
t
−
y
k
sin
ω
0
t
=
0.707
A
cos
ω
0
t
−
0.707
A
sin
ω
0
t
=
A
cos
(
ω
0
t
+
π
4
)
\begin{aligned} s\left( t \right) &=\Re \left\{ g_ke^{j\omega _0t} \right\} \\ &=\Re \left\{ \left( x_k+jy_k \right) \left( \cos \omega _0t+j\sin \omega _0t \right) \right\} \\ &=x_k\cos \omega _0t-y_k\sin \omega _0t \\ &=0.707A\cos \omega _0t-0.707A\sin \omega _0t \\ &=A\cos \left( \omega _0t+\frac{\pi}{4} \right) \end{aligned}
s(t)=ℜ{gkejω0t}=ℜ{(xk+jyk)(cosω0t+jsinω0t)}=xkcosω0t−yksinω0t=0.707Acosω0t−0.707Asinω0t=Acos(ω0t+4π)
此外, 注意在调制过程中载波的正交项经过了符号反转。
- 如果将 0.707 A cos ω 0 t 0.707A\cos\omega_0t 0.707Acosω0t 作为参考信号,上式的发送波形 s ( t ) s\left( t \right) s(t) 超前参考波形 π 4 \dfrac{\pi}{4} 4π。
- 如果将 − 0.707 A sin ω 0 t -0.707A\sin\omega_0t −0.707Asinω0t作为参考信号,上式的发送波形 s ( t ) s\left( t \right) s(t) 滞后参考波形 π 4 \dfrac{\pi}{4} 4π。
图 4.21 画出了它们之间的关系。

6.2 D8PSK 调制举例
图 4.22 描述了差分 8PSK(D8PSK)调制器的正交实现。由于是 8 进制调制,故给每个相位
Δ
φ
k
\Delta\varphi_k
Δφk 指定 3 比特信息
(
x
k
,
y
k
,
z
k
)
\left(x_k,y_k,z_k\right)
(xk,yk,zk)。对于差分调制而言,在第
k
k
k 个发送时刻送出的信号相位
φ
k
\varphi_k
φk 可以表示为
φ
k
=
Δ
φ
k
+
φ
k
−
1
\varphi_k=\Delta\varphi_k+\varphi_{k-1}
φk=Δφk+φk−1将当前信息的相位
Δ
φ
k
\Delta\varphi_k
Δφk 加上前一数据相位
φ
k
−
1
\varphi_{k-1}
φk−1 的过程,就是信息的差分编码过程。由上式产生的相位矢量序列与 5.2 小节描述的差分编码过程相似。图 4.22 中 3 比特数据到
Δ
φ
k
\Delta\varphi_k
Δφk 的映射,从 000 到 111 并不是按照自然二进制码的顺序,这里用的是一种特殊的码型,称为格雷码(Gray)。(这种由二进制到多进制转换的码型的优点,将在 9.4 小节中阐述。)

对于图 4.22 的调制器,假定输入数据序列在
k
=
1
,
2
,
3
,
4
k=1 , 2,3,4
k=1,2,3,4 时分别等于 110,001,110,010。然后按照图 4.22 的数据编码表和
φ
k
=
Δ
φ
k
+
φ
k
−
1
\varphi_k=\Delta\varphi_k+\varphi_{k-1}
φk=Δφk+φk−1 进行调制,
k
=
0
k=0
k=0 时初始相位
φ
0
=
0
\varphi_0=0
φ0=0;
k
=
1
k=1
k=1 时,
x
1
y
1
z
1
=
110
x_1y_1z_1=110
x1y1z1=110 对应的差分数据相位
φ
1
=
4
π
4
=
π
\varphi_1=\dfrac{4\pi}{4}=\pi
φ1=44π=π。将旋转矢量幅度归一化后,同相(
I
I
I)和正交(
Q
Q
Q)基带脉冲分别为 -1 和 0,如图 4.22 所示。这些脉冲成形一般都由滤波器(如升余弦)产生。
在
k
=
2
k=2
k=2 时刻,由图 4.22 的表可以看出,001 对应着
Δ
φ
2
=
π
4
\Delta\varphi_2=\dfrac{\pi}{4}
Δφ2=4π。由
φ
k
=
Δ
φ
k
+
φ
k
−
1
\varphi_k=\Delta\varphi_k+\varphi_{k-1}
φk=Δφk+φk−1,第二个差分数据相位为
φ
2
=
π
+
π
4
=
5
π
4
\varphi_2=\pi+\dfrac{\pi}{4}=\dfrac{5\pi}{4}
φ2=π+4π=45π,而该时刻
I
I
I 和
Q
Q
Q 基带脉冲分别为
x
k
=
−
0.707
x_k = -0.707
xk=−0.707,
y
k
=
−
0.707
y_k= -0.707
yk=−0.707。发送波形具有如下形式:
s
(
t
)
=
ℜ
{
[
x
(
t
)
+
j
y
(
t
)
]
[
cos
ω
0
t
+
j
sin
ω
0
t
]
}
=
x
(
t
)
cos
ω
0
t
−
y
(
t
)
sin
ω
0
\begin{aligned} s\left( t \right) &=\Re \left\{ \left[ x\left( t \right) +jy\left( t \right) \right] \left[ \cos \omega _0t+j\sin \omega _0t \right] \right\} \\ &=x\left( t \right) \cos \omega _0t-y\left( t \right) \sin \omega _0 \end{aligned}
s(t)=ℜ{[x(t)+jy(t)][cosω0t+jsinω0t]}=x(t)cosω0t−y(t)sinω0 信号集可以在相位 - 幅度平面上表示出来,如 MPSK 或 MQAM。上式中有一种有趣的现象,信号发送的正交实现把所有的信号类型简化为信号幅度调制。将平面上的任意矢量在载波的余弦和正弦分量上投影,得到同相和正交投影。对两个投影分别进行幅度调制就得到发送波形。为简便起见,经常忽略脉冲成形,即假定数据脉冲为理想的矩形脉冲。当
k
=
2
k=2
k=2 时,
x
k
=
−
0.707
x_k= -0.707
xk=−0.707,
y
k
=
−
0.707
y_k= - 0.707
yk=−0.707,运用上式,
s
(
t
)
s\left(t\right)
s(t) 有如下表达式:
s
(
t
)
=
−
0.707
−
cos
ω
0
t
+
0.707
sin
ω
0
t
=
sin
(
ω
0
t
−
π
4
)
\begin{aligned} s\left( t \right) &=-0.707-\cos\omega_0t+0.707\sin\omega_0t \\ &=\sin\left(\omega_0t-\dfrac{\pi}{4}\right) \end{aligned}
s(t)=−0.707−cosω0t+0.707sinω0t=sin(ω0t−4π)
6.3 D8PSK 解调举例
前面一节介绍了 D8PSK 的正交调制,将复包络(基带信息)与
e
j
ω
0
t
e^{j\omega_0t}
ejω0t 相乘, 取乘积结果的实部得到
s
(
t
)
s\left(t\right)
s(t),这就是调制的正交实现。与正交调制相似,解调是调制的逆过程,为了恢复基带波形,将接收的带通波形与
e
−
j
ω
0
t
e^{-j\omega_0t}
e−jω0t 相乘。图 4.23 左边为图 4.22 调制的简化形式,按照前面的例子,
k
=
2
k=2
k=2 时,
s
(
t
)
=
sin
(
ω
0
t
−
π
4
)
s\left( t \right) =\sin \left( \omega _0t-\dfrac{\pi}{4} \right)
s(t)=sin(ω0t−4π),图 4.23 右边为解调的正交实现。

注意,调制端的 − sin ω 0 t -\sin\omega_0t −sinω0t 和解调端的 − sin ω 0 t -\sin\omega_0t −sinω0t 存在微妙的差别:
- 在调制端,负号项取自复波形信号的实部(复包络和复载波的乘积);
- 在解调端, − sin ω 0 t -\sin\omega_0t −sinω0t 取自带通波形与调制载波的共扼 e − j ω 0 t e^{-j\omega_0t} e−jω0t 的乘积。
如果相位可以再生就为相干解调。为简化该过程的关系式,忽略了噪声。解调端同相分量乘上
cos
ω
0
t
\cos\omega_0t
cosω0t 之后,得到
A
A
A 点信号的表达式:
A
=
(
−
0.707
cos
ω
0
t
+
0.707
sin
ω
0
t
)
cos
ω
0
t
=
−
0.707
cos
2
ω
0
t
+
0.707
sin
ω
0
t
cos
ω
0
t
\begin{aligned} A&=\left( -0.707\cos \omega _0t+0.707\sin \omega _0t \right) \cos \omega _0t \\ &=-0.707\cos ^2\omega _0t+0.707\sin \omega _0t\cos \omega _0t \end{aligned}
A=(−0.707cosω0t+0.707sinω0t)cosω0t=−0.707cos2ω0t+0.707sinω0tcosω0t由三角恒等式,得
A
=
−
0.707
2
(
1
+
cos
2
ω
0
t
)
+
0.707
2
sin
2
ω
0
t
A=\frac{-0.707}{2}\left( 1+\cos 2\omega _0t \right) +\frac{0.707}{2}\sin 2\omega _0t
A=2−0.707(1+cos2ω0t)+20.707sin2ω0t通过低通滤波器(LPF)后,在
A
′
A^{'}
A′ 处恢复出理想负脉冲,如下所示:
A
′
=
−
0.707
(
乘
以
比
例
因
子
)
A^{'}=-0.707\left( 乘以比例因子 \right)
A′=−0.707(乘以比例因子)同样,解调端正交分量乘上
−
sin
ω
0
t
-\sin\omega_0t
−sinω0t 之后,得到
B
B
B 点的信号表达式:
B
=
(
−
0.707
cos
ω
0
t
+
0.707
sin
ω
0
t
)
(
−
sin
ω
0
t
)
=
0.707
2
sin
2
ω
0
t
−
0.707
2
(
1
−
cos
2
ω
0
t
)
\begin{aligned} B&=\left( -0.707\cos \omega _0t+0.707\sin \omega _0t \right) \left( - \sin \omega _0t\right) \\ &=\frac{0.707}{2}\sin 2\omega _0t - \frac{0.707}{2}\left( 1- \cos 2\omega _0t\right) \end{aligned}
B=(−0.707cosω0t+0.707sinω0t)(−sinω0t)=20.707sin2ω0t−20.707(1−cos2ω0t)通过低通滤波器(LPF)后,在
B
′
B^{'}
B′ 处恢复出理想负脉冲,如下所示:
B
′
=
−
0.707
(
乘
以
比
例
因
子
)
B^{'}=-0.707\left( 乘以比例因子 \right)
B′=−0.707(乘以比例因子)从解调和滤波后得到的
A
′
A^{'}
A′ 点和
B
′
B^{'}
B′ 点可以看出,
I
I
I 通道和
Q
Q
Q 通道的理想差分脉冲都等于
−
0.707
-0.707
−0.707。由于调制 / 解调是差分的,
k
=
2
k=2
k=2 时:
Δ
φ
k
=
2
=
φ
k
=
2
−
φ
k
=
1
\Delta\varphi_{k=2} = \varphi_{k=2} - \varphi_{k=1}
Δφk=2=φk=2−φk=1假定在前一个时刻
k
=
1
k=1
k=1 时,解调器正确地将信号相位恢复成
π
\pi
π,由上式,有
Δ
φ
k
=
2
=
5
π
4
−
π
=
π
4
\Delta\varphi_{k=2} = \frac{5\pi}{4}-\pi = \frac{\pi}{4}
Δφk=2=45π−π=4π参考前面图 4.22 的数据编码表,在
k
=
2
k=2
k=2 时对应的检测数据序列为
x
2
y
2
z
2
=
001
x_2y_2z_2=001
x2y2z2=001。
7. 二进制系统的差错性能
7.1 BPSK 相干检测的误比特率
差错概率 P E P_E PE 是比较数字调制方式的一个很重要的指标。对于相关器或匹配滤波器, P E P_E PE 的计算可以通过几何图形得到( 如图 4.6)。即已知发送信号矢量 s 1 \mathbf{s}_1 s1,噪声矢量 n \mathbf{n} n,求得接收信号落在区域 1 外的概率。将这种检测器做出错误判决的概率称为误码率( P E P_E PE),由误比特率( P B P_B PB)能很方便地确定系统性能,即便是对 M > 2 M> 2 M>2 的情况,也是如此。 P B P_B PB 和 P E P_E PE 之间的关系在 9.3 小节的正交信号和 9.4 小节的多进制相位信号中均有阐述。
为方便起见,本节仅限于对 BPSK 调制信号相干检测情况进行讨论。在这种情况下,误码率就等于误比特率。假定发送信号是等概的,且当发送信号为
s
i
(
t
)
(
i
=
1
,
2
)
s_i\left( t \right) \left( i=1,2 \right)
si(t)(i=1,2) 时,接收信号
r
(
t
)
r\left( t \right)
r(t) 等于
s
i
(
t
)
+
n
(
t
)
s_i\left( t \right) + n\left( t \right)
si(t)+n(t),
n
(
t
)
n\left( t \right)
n(t) 为 AWGN 过程,忽略由信道和电路产生的码间串扰(ISI)带来的影响。当
s
1
(
t
)
s_1\left( t \right)
s1(t) 和
s
2
(
t
)
s_2\left( t \right)
s2(t) 取为极性相反时,如 4.1 小节中所述,可由一维信号空间描述,此时
s
1
(
t
)
=
E
ψ
1
(
t
)
s
2
(
t
)
=
−
E
ψ
1
(
t
)
0
⩽
t
⩽
T
\begin{array}{l} s_1\left( t \right) =\sqrt{E}\psi _1\left( t \right)\\ s_2\left( t \right) =-\sqrt{E}\psi _1\left( t \right)\\ \end{array} \quad 0\leqslant t\leqslant T
s1(t)=Eψ1(t)s2(t)=−Eψ1(t)0⩽t⩽T 检测器选取具有最大相关输出值
z
i
(
T
)
z_i\left( T \right)
zi(T) 的
s
i
(
t
)
s_i\left( t \right)
si(t),或者在等能量对极信号情况下,检测器直接采用如下判决规则
s
1
(
t
)
,
z
(
T
)
>
γ
0
=
0
s
2
(
t
)
,
otherwise
\begin{aligned} &s_1\left(t\right),&&z\left(T\right)>\gamma_0=0 \\ &s_2\left(t\right),&&\text{otherwise} \end{aligned}
s1(t),s2(t),z(T)>γ0=0otherwise 如图 4.9 所示,会产生两种类型的错误:第一种是如果发送信号为
s
1
(
t
)
s_1\left( t \right)
s1(t),由于噪声影响,检测器根据
z
(
T
)
z\left( T \right)
z(T) 为负值判决为假设
H
2
H_2
H2,即发送信号为
s
2
(
t
)
s_2\left( t \right)
s2(t);第二种是如果发送信号为
s
2
(
t
)
s_2\left( t \right)
s2(t),检测器根据
z
(
T
)
z\left( T \right)
z(T) 为正值判决为假设
H
1
H_1
H1,即发送信号为
s
1
(
t
)
s_1\left( t \right)
s1(t)。
在《Part 3——基带信号解调与检测》的 2.1.1 小节推导过二进制最小差错检测器下的误比特率
P
B
P_B
PB 的表达式,重写如下:
P
B
=
∫
a
1
−
a
2
2
σ
0
∞
1
2
π
exp
(
−
u
2
2
)
d
u
=
Q
(
a
1
−
a
2
2
σ
0
)
P_B=\int_{\frac{a_1-a_2}{2\sigma _0}}^{\infty}{\frac{1}{\sqrt{2\pi}}\exp \left( -\frac{u^2}{2} \right) \text{d}u}=Q\left( \frac{a_1-a_2}{2\sigma _0} \right)
PB=∫2σ0a1−a2∞2π1exp(−2u2)du=Q(2σ0a1−a2)其中,
σ
0
\sigma_0
σ0 为相关器输出噪声的标准方差。函数
Q
(
x
)
Q\left(x\right)
Q(x) 称为误差补函数或联合误差函数,定义如下:
Q
(
x
)
=
1
2
π
∫
x
∞
exp
(
−
u
2
2
)
d
u
Q\left( x \right) =\frac{1}{\sqrt{2\pi}}\int_x^{\infty}{\exp \left( -\frac{u^2}{2} \right) \text{d}u}
Q(x)=2π1∫x∞exp(−2u2)du在《Part 3——基带信号解调与检测》的 第 2 节中有更为详细的阐述。
对于本节描述的 BPSK 形式的等能量对极信号,当发送信号为
s
1
(
t
)
s_1\left( t \right)
s1(t) 时,接收器输出信号分量为
a
1
=
E
b
a_1=\sqrt{E_b}
a1=Eb;当发送信号为
s
2
(
t
)
s_2\left( t \right)
s2(t) 时,接收器输出信号分量为
a
2
=
−
E
b
a_2=-\sqrt{E_b}
a2=−Eb,
E
b
E_b
Eb 是单位二进制码元的能量。AWGN 下可用
N
0
2
\dfrac{N_0}{2}
2N0 代替噪声方差
σ
0
\sigma_0
σ0,于是误比特率又可写成如下形式:
P
B
=
∫
2
E
b
N
0
∞
1
2
π
exp
(
−
u
2
2
)
d
u
=
Q
(
2
E
b
N
0
)
P_B=\int_{\sqrt{\frac{2E_b}{N_0}}}^{\infty}{\frac{1}{\sqrt{2\pi}}\exp \left( -\frac{u^2}{2} \right) \text{d}u}=Q\left( \sqrt{\frac{2E_b}{N_0}} \right)
PB=∫N02Eb∞2π1exp(−2u2)du=Q(N02Eb)《Part 3——基带信号解调与检测》中推导过的
P
B
=
Q
(
E
b
N
0
)
P_B=Q\left( \sqrt{\dfrac{E_b}{N_0}} \right)
PB=Q(N0Eb) 是对一般的对极信号进行匹配滤波检测推出的结论,
P
B
=
Q
(
2
E
b
N
0
)
P_B=Q\left( \sqrt{\dfrac{2E_b}{N_0}} \right)
PB=Q(N02Eb) 是对特殊情况的基带对极信号进行匹配滤波检测得出的结论。这两个结论同上面对带通对极 BPSK 信号导出的结论是一样的,这也同时验证了前面所讲的等效性原理。等效性原理证明频率上的搬移对于检测的数学表示没有产生影响,因此本文中,对带通信号检测采用的匹配滤波器或相关器,与基带信号的情况是等效的。
7.2 差分编码二进制 PSK 相干检测的误比特率
有时信道波形会发生反转,例如,利用锁相环产生的相干参考波形,该波形就存在相位模糊问题。如果 DPSK 调制的载波相位发生逆转,那么对信息数据会产生怎样的影响呢? 由于信息数据反映了相邻码元之间的异同性,故唯一的影响是反转时或反转之后的一个比特发生错误。载波的倒置并没有改变其他码元之间的异同性。有时信息(和指定的波形)采用差分编码和相干检测,仅仅就是为了避免相位模糊问题。
差分相干编码 PSK 的误比特率为
P
B
=
2
Q
(
2
E
b
N
0
)
[
1
−
Q
(
2
E
b
N
0
)
]
P_B=2Q\left( \sqrt{\frac{2E_b}{N_0}} \right) \left[ 1-Q\left( \sqrt{\frac{2E_b}{N_0}} \right) \right]
PB=2Q(N02Eb)[1−Q(N02Eb)] 图 4.24 画出了这种关系。注意,与相干 PSK 相比,差分相干 PSK 在性能上有所恶化。这主要归咎于差分编码,因为任意单个的检测错误都会导致两个判决错误。DPSK 更常用的差分相干检测的误差性能将在 7.5 小节中叙述。

7.3 二进制正交 FSK 相干检测的误比特率
在 7.1 小节给出了相干对极信号的误比特率,一般的二进制相干信号(不仅限于对极信号)的误比特率的表达式如下:
P
B
=
1
2
π
∫
(
1
−
ρ
)
E
b
N
0
∞
exp
(
−
u
2
2
)
d
u
P_B=\frac{1}{\sqrt{2\pi}}\int_{\sqrt{\frac{\left( 1-\rho \right) E_b}{N_0}}}^{\infty}{\exp \left( -\frac{u^2}{2} \right) \text{d}u}
PB=2π1∫N0(1−ρ)Eb∞exp(−2u2)du其中
ρ
=
cos
θ
\rho=\cos\theta
ρ=cosθ 为
s
1
(
t
)
s_1\left(t\right)
s1(t) 和
s
2
(
t
)
s_2\left(t\right)
s2(t) 的互相关系数,其中,
θ
\theta
θ 是信号矢量
s
1
\mathbf{s}_1
s1 和
s
2
\mathbf{s}_2
s2 之间的夹角(如图 4.6)。对于对极信号如 BPSK,
θ
=
π
\theta=\pi
θ=π,因此
ρ
=
−
1
\rho=-1
ρ=−1。
对于正交信号如二进制 FSK(BFSK),由于矢量
s
1
\mathbf{s}_1
s1 和
s
2
\mathbf{s}_2
s2 互相垂直,
θ
=
π
2
\theta=\dfrac{\pi}{2}
θ=2π,因此,
ρ
=
0
\rho=0
ρ=0。此时,由一般二进制相干信号的
P
B
P_B
PB 的表达式可得
P
B
=
1
2
π
∫
E
b
N
0
∞
exp
(
−
u
2
2
)
d
u
=
Q
(
E
b
N
0
)
P_B=\frac{1}{\sqrt{2\pi}}\int_{\sqrt{\frac{E_b}{N_0}}}^{\infty}{\exp \left( -\frac{u^2}{2} \right) \text{d}u}=Q\left( \sqrt{\frac{E_b}{N_0}} \right)
PB=2π1∫N0Eb∞exp(−2u2)du=Q(N0Eb)
由前述可知,正交 BFSK 相干检测的误比特率、一般正交信号匹配滤波检测的误比特率及基带正交信号(单极性脉冲)的匹配滤波检测的误比特率是完全相同的,图 4.24 画出了它的误比特率曲线。本文并没有详细讨论通断键控(OOK),但是很容易知道通断键控信号就是一个正交信号集(单极性脉冲等效于基带 OOK)。因此,上式表达的关系可应用于 OOK 的匹配滤波检测,也可应用于任何正交信号的相干检测。
7.4 二进制正交 FSK 非相干检测的误比特率
考虑等概二进制正交 FSK 信号集
{
s
i
(
t
)
}
\left\{ s_i\left( t \right) \right\}
{si(t)}:
s
i
(
t
)
=
2
E
T
cos
(
ω
i
t
+
φ
)
0
⩽
t
⩽
T
i
=
1
,
2
s_i\left( t \right) =\sqrt{\frac{2E}{T}}\cos \left( \omega _it+\varphi \right) \quad \begin{array}{l} 0\leqslant t\leqslant T\\ i=1,2\\ \end{array}
si(t)=T2Ecos(ωit+φ)0⩽t⩽Ti=1,2相位
φ
\varphi
φ 假定为未知常量,检测器由
M
=
2
M=2
M=2 个通道的带通滤波器和包络检测器组成,如图 4.18 所示。检测器的输入为接收信号
r
(
t
)
=
s
i
(
t
)
+
n
(
t
)
r\left( t \right) =s_i\left( t \right) +n\left( t \right)
r(t)=si(t)+n(t),
n
(
t
)
n\left( t \right)
n(t) 是双边功率谱密度为
N
0
2
\dfrac{N_0}{2}
2N0 的高斯白噪声过程。假设
s
1
(
t
)
s_1\left( t \right)
s1(t) 和
s
2
(
t
)
s_2\left( t \right)
s2(t) 频率间隔足够大,其重叠部分可忽略不计。由于
s
1
(
t
)
s_1\left( t \right)
s1(t) 和
s
2
(
t
)
s_2\left( t \right)
s2(t) 是等概的,因此可以与基带信号一样计算误比特率
P
B
P_B
PB:
P
B
=
1
2
P
(
H
2
∣
s
2
)
+
1
2
P
(
H
2
∣
s
2
)
=
1
2
∫
−
∞
0
p
(
z
∣
s
1
)
d
z
+
1
2
∫
0
∞
p
(
z
∣
s
2
)
d
z
\begin{aligned} P_B &=\frac{1}{2}P\left(H_2\mid s_2 \right) + \frac{1}{2} P \left( H_2 \mid s_2 \right) \\ &=\frac{1}{2}\int^0_{-\infty}{p \left( z \mid s_1 \right)\text{d}z} + \frac{1}{2}\int^\infty_{0}{p \left( z \mid s_2 \right)\text{d}z} \end{aligned}
PB=21P(H2∣s2)+21P(H2∣s2)=21∫−∞0p(z∣s1)dz+21∫0∞p(z∣s2)dz对于二进制,检验统计量
z
(
T
)
z\left(T\right)
z(T) 定义为
z
1
(
T
)
−
z
2
(
T
)
z_1\left(T\right)-z_2\left(T\right)
z1(T)−z2(T)。假设滤波器带宽
W
f
W_f
Wf 为
1
T
\dfrac1T
T1,这样滤波器输出(近似)为 FSK 信号包络。如果接收时无噪声,
- 发送 s 1 ( t ) s_1\left( t \right) s1(t) 时, z ( T ) = 2 E T z\left(T\right) = \sqrt{\dfrac{2E}{T}} z(T)=T2E;
- 发送 s 2 ( t ) s_2\left( t \right) s2(t) 时, z ( T ) = − 2 E T z\left(T\right) = -\sqrt{\dfrac{2E}{T}} z(T)=−T2E。
根据对称性,最优的门限值为
γ
0
=
0
\gamma_0=0
γ0=0,
p
(
z
∣
s
1
)
p \left( z \mid s_1 \right)
p(z∣s1) 类似于
p
(
z
∣
s
2
)
p \left( z \mid s_2 \right)
p(z∣s2),即
p
(
z
∣
s
1
)
=
p
(
−
z
∣
s
2
)
p\left( z\mid s_1 \right) =p\left( -z\mid s_2 \right)
p(z∣s1)=p(−z∣s2)因此,有
P
B
=
∫
0
∞
p
(
z
∣
s
2
)
d
z
P_B=\int_0^{\infty}{p\left( z\mid s_2 \right) \text{d}z}
PB=∫0∞p(z∣s2)dz或者
P
B
=
P
(
z
1
>
z
2
∣
s
2
)
P_B=P\left( z_1>z_2\mid s_2 \right)
PB=P(z1>z2∣s2)其中,
z
1
z_1
z1 和
z
2
z_2
z2 表示图 4.18 所示的包络检测器输出
z
1
(
T
)
z_1\left(T\right)
z1(T) 和
z
2
(
T
)
z_2\left(T\right)
z2(T)。当发送
s
2
(
t
)
=
cos
ω
0
t
s_2\left(t\right)=\cos\omega_0t
s2(t)=cosω0t 时,
r
(
t
)
=
s
2
(
t
)
+
n
(
t
)
r\left( t \right) =s_2\left( t \right) +n\left( t \right)
r(t)=s2(t)+n(t),输出
z
1
(
T
)
z_1\left(T\right)
z1(T) 为高斯噪声随机变量,不含信号分量。高斯分布进入非线性包络检测器,输出为瑞利(Rayleigh)分布,所以
p
(
z
1
∣
s
2
)
=
{
z
1
σ
0
2
exp
(
−
z
1
2
2
σ
0
2
)
,
z
1
⩾
0
0
,
z
1
<
0
p\left( z_1\mid s_2 \right) =\begin{cases}\begin{aligned} &\dfrac{z_1}{\sigma _{0}^{2}}\exp \left( -\dfrac{z_1^2}{2\sigma _{0}^{2}} \right) ,&&z_1\geqslant 0\\ &0,&&z_1<0 \end{aligned}\end{cases}
p(z1∣s2)=⎩⎪⎨⎪⎧σ02z1exp(−2σ02z12),0,z1⩾0z1<0其中,
σ
0
2
\sigma_0^2
σ02 为滤波器输出噪声。另一方面,由于下面的包络检测器输入为正弦信号加噪声,故
z
2
(
T
)
z_2\left(T\right)
z2(T) 服从莱斯(Rice)分布。
p
(
z
2
∣
s
2
)
p\left( z_2\mid s_2 \right)
p(z2∣s2) 为
p
(
z
2
∣
s
2
)
=
{
z
2
σ
0
2
exp
[
−
(
z
2
2
+
A
2
)
2
σ
0
2
]
I
0
(
z
2
A
σ
0
2
)
,
z
2
⩾
0
0
,
z
2
<
0
p\left( z_2\mid s_2 \right) =\begin{cases}\begin{aligned} &\dfrac{z_2}{\sigma _{0}^{2}}\exp \left[ -\dfrac{\left( z_{2}^{2}+A^2 \right)}{2\sigma _{0}^{2}} \right] I_0\left( \dfrac{z_2A}{\sigma _{0}^{2}} \right),&&z_2\geqslant 0\\ &0,&&z_2<0 \end{aligned}\end{cases}
p(z2∣s2)=⎩⎪⎪⎨⎪⎪⎧σ02z2exp[−2σ02(z22+A2)]I0(σ02z2A),0,z2⩾0z2<0其中,
A
=
2
E
T
A=\sqrt{\dfrac{2E}{T}}
A=T2E,
σ
0
2
\sigma_0^2
σ02 同前面一样,为滤波器输出噪声。
I
0
(
x
)
I_0\left(x\right)
I0(x) 为第一类零阶修正贝塞尔函数,定义为
I
0
(
x
)
=
1
2
π
∫
0
2
π
exp
(
x
cos
θ
)
d
θ
I_0\left( x \right) =\frac{1}{2\pi}\int_0^{2\pi}{\exp \left( x\cos \theta \right) \text{d}\theta}
I0(x)=2π1∫02πexp(xcosθ)dθ 发送信号为
s
2
(
t
)
s_2\left(t\right)
s2(t) 时,当从上面通道得到的包络采样
z
1
(
T
)
z_1\left(T\right)
z1(T)(只有噪声)大于下面通道获得的包络采样
z
2
(
T
)
z_2\left(T\right)
z2(T)(信号加噪声)时,则接收器出现一个检测错误。因此关于
z
1
z_1
z1 将
p
(
z
1
∣
s
2
)
p\left( z_1\mid s_2 \right)
p(z1∣s2) 从
z
2
z_2
z2 到无穷进行积分,然后在
z
2
z_2
z2 所有可能取到的值上求平均就得到差错概率,即
P
B
=
P
(
z
1
>
z
2
∣
s
2
)
=
∫
0
∞
p
(
z
2
∣
s
2
)
[
∫
z
1
∞
p
(
z
1
∣
s
2
)
d
z
1
]
d
z
2
=
∫
0
∞
z
2
σ
0
2
exp
[
−
(
z
2
2
+
A
2
)
2
σ
0
2
]
I
0
(
z
2
A
σ
0
)
[
∫
z
1
∞
z
1
σ
0
2
exp
(
−
z
1
2
2
σ
0
2
)
d
z
1
]
d
z
2
\begin{aligned} P_B&=P\left( z_1>z_2\mid s_2 \right) \\ &=\int_0^{\infty}{\begin{array}{c} p\left( z_2\mid s_2 \right) \left[ \int_{z_1}^{\infty}{p\left( z_1\mid s_2 \right) \text{d}z_1} \right] \text{d}z_2\\ \end{array}} \\ &=\int_0^{\infty}{\frac{z_2}{\sigma _{0}^{2}}\exp \left[ -\frac{\left( z_{2}^{2}+A^2 \right)}{2\sigma _{0}^{2}} \right] I_0\left( \frac{z_2A}{\sigma _0} \right) \left[ \int_{z_1}^{\infty}{\frac{z_1}{\sigma _{0}^{2}}\exp \left( -\frac{z_{1}^{2}}{2\sigma _{0}^{2}} \right) \text{d}z_1} \right] \text{d}z_2} \end{aligned}
PB=P(z1>z2∣s2)=∫0∞p(z2∣s2)[∫z1∞p(z1∣s2)dz1]dz2=∫0∞σ02z2exp[−2σ02(z22+A2)]I0(σ0z2A)[∫z1∞σ02z1exp(−2σ02z12)dz1]dz2其中,
A
=
2
E
T
A=\sqrt{\dfrac{2E}{T}}
A=T2E,中括号里面的积分是对固定的
z
2
z_2
z2,发送信号为
s
2
(
t
)
s_2\left(t\right)
s2(t) 的条件错误概率的积分,外面的积分是对在
z
2
z_2
z2 所有可能的取值上的条件概率求平均。计算该积分式,得
P
B
=
1
2
exp
(
−
A
2
4
σ
2
)
P_B=\frac{1}{2}\exp \left( -\frac{A^2}{4\sigma ^2} \right)
PB=21exp(−4σ2A2)由
P
x
=
2
∫
0
∞
G
x
(
f
)
d
f
P_x=\displaystyle2\int_0^{\infty}{G_x\left( f \right) \text{d}f}
Px=2∫0∞Gx(f)df 可计算出滤波器输出噪声为
σ
0
2
=
2
(
N
0
2
)
W
f
\sigma _{0}^{2}=2\left( \frac{N_0}{2} \right) W_f
σ02=2(2N0)Wf其中,
G
n
(
f
)
=
N
0
2
G_n\left(f\right)=\dfrac{N_0}{2}
Gn(f)=2N0,
W
f
W_f
Wf 是滤波器带宽,则误比特率可以进一步表示为
P
B
=
1
2
exp
(
−
A
2
4
N
0
W
f
)
\boxed{P_B=\frac{1}{2}\exp \left( -\frac{A^2}{4N_0W_f} \right) }
PB=21exp(−4N0WfA2)上式表明误码率性能取决于带通滤波器的带宽,当
W
f
W_f
Wf 降低时,
P
B
P_B
PB 减小,仅在忽略码间串扰(ISI)时该结论才是有效的。滤波器滚降因子
r
=
0
r=0
r=0 时,无码间串扰所要求的最小
W
f
=
R
b/s
=
1
/
T
W_f= R\text{ b/s} = 1/T
Wf=R b/s=1/T,此时误比特率为
P
B
=
1
2
exp
(
−
A
2
T
4
N
0
)
=
1
2
exp
(
−
E
b
2
N
0
)
\boxed{P_B=\frac{1}{2}\exp \left( -\frac{A^2T}{4N_0} \right) =\frac{1}{2}\exp \left( -\frac{E_b}{2N_0} \right) }
PB=21exp(−4N0A2T)=21exp(−2N0Eb)其中,
E
b
=
1
2
A
2
T
E_b=\dfrac12A^2T
Eb=21A2T 是单位比特能量。比较非相于 FSK 和相干 FSK 的误差性能(如图 4.24),可以看出,要得到相同的
P
B
P_B
PB,非相干 FSK 比相干 FSK 大约需要多 1 dB 的
E
b
/
N
0
E_b/N_0
Eb/N0(对于
P
B
⩽
1
0
−
4
P_B\leqslant 10^{-4}
PB⩽10−4 的情况)。因为不需要产生相干参考信号,故非相干较容易实现。因此,几乎所有的 FSK 接收机均采用非相干检测。下面一节将会比较非相干正交 FSK 和非相干 DPSK,与相干正交 FSK 和相干 DPSK 比较一样,两者之间同样有 3 dB 的差别。
7.5 二进制 DPSK 的误比特率
BPSK 信号集定义如下:
x
1
(
t
)
=
2
E
T
cos
(
ω
0
t
+
φ
)
,
0
⩽
t
⩽
T
x
2
(
t
)
=
2
E
T
cos
(
ω
0
t
+
φ
±
φ
)
,
0
⩽
t
⩽
T
\begin{aligned} &x_1\left(t\right)=\sqrt{\frac{2E}{T}}\cos\left(\omega_0t+\varphi\right),\quad 0 \leqslant t \leqslant T \\ &x_2\left(t\right)=\sqrt{\frac{2E}{T}}\cos\left(\omega_0t+\varphi \pm \varphi\right),\quad 0 \leqslant t \leqslant T \end{aligned}
x1(t)=T2Ecos(ω0t+φ),0⩽t⩽Tx2(t)=T2Ecos(ω0t+φ±φ),0⩽t⩽TDPSK 的一个特征是它的信号空间内没有固定的判决区域,其判决基于连续两个接收信号之间的相位差。对 DPSK 信号而言,一般用一对二进制信号来传送每比特信息
s
1
(
t
)
=
(
x
1
,
x
1
)
或
(
x
2
,
x
2
)
0
⩽
t
⩽
2
T
s
2
(
t
)
=
(
x
1
,
x
2
)
或
(
x
2
,
x
1
)
0
⩽
t
⩽
2
T
s_1\left( t \right) =\left( x_1,x_1 \right)\quad \text{或}\quad\left( x_2,x_2 \right) \quad0\leqslant t\leqslant 2T \\ s_2\left( t \right) =\left( x_1,x_2 \right)\quad \text{或}\quad\left( x_2,x_1 \right) \quad0\leqslant t\leqslant 2T
s1(t)=(x1,x1)或(x2,x2)0⩽t⩽2Ts2(t)=(x1,x2)或(x2,x1)0⩽t⩽2T其中,
(
x
i
,
x
j
)
(
i
,
j
=
1
,
2
)
\left( x_i,x_j \right) \left( i,j=1,2 \right)
(xi,xj)(i,j=1,2) 表示信号
x
i
(
t
)
x_i\left(t\right)
xi(t) 后面跟着
x
j
(
t
)
x_j\left(t\right)
xj(t)。每个波形的前
T
T
T 秒实际上是前面波形的后
T
T
T 秒。注意,
s
1
(
t
)
s_1\left(t\right)
s1(t) 和
s
2
(
t
)
s_2\left(t\right)
s2(t) 各为两种可能的波形之一,且
x
1
(
t
)
x_1\left(t\right)
x1(t) 和
x
2
(
t
)
x_2\left(t\right)
x2(t) 为对极信号。这样,
s
1
(
t
)
s_1\left(t\right)
s1(t) 和
s
2
(
t
)
s_2\left(t\right)
s2(t) 任意形式组合的相关均可表示为
z
(
T
)
=
∫
0
2
T
s
1
(
t
)
s
2
(
t
)
d
t
=
∫
0
T
[
x
1
(
t
)
]
2
d
t
−
∫
0
T
[
x
1
(
t
)
]
2
d
t
=
0
\begin{aligned} z\left( T \right) &=\int_0^{2T}{s_1\left( t \right) s_2\left( t \right) \text{d}t} \\ &=\int_0^T{\left[ x_1\left( t \right) \right] ^2\text{d}t}-\int_0^T{\left[ x_1\left( t \right) \right] ^2\text{d}t}=0 \end{aligned}
z(T)=∫02Ts1(t)s2(t)dt=∫0T[x1(t)]2dt−∫0T[x1(t)]2dt=0因此,DPSK 信号对在
2
T
2T
2T 秒内是相互正交的。如图 4.25a 所示,非相干包络检测器有 4 个通道,分别与每种可能的包络输出匹配。但是,由于代表同一个码元的两个包络检测之间只是符号相反, 每个包络采样仍是相同的,因此可以只用一个单独的信道
s
1
(
t
)
s_1\left(t\right)
s1(t) 与
(
x
1
,
x
1
)
\left( x_1,x_1 \right)
(x1,x1) 或
(
x
2
,
x
2
)
\left( x_2,x_2 \right)
(x2,x2) 匹配,再用另一个单独的信道
s
2
(
t
)
s_2\left(t\right)
s2(t) 与
(
x
1
,
x
2
)
\left( x_1,x_2 \right)
(x1,x2) 或
(
x
2
,
x
1
)
\left( x_2,x_1 \right)
(x2,x1) 匹配来实现检测器。这样, DPSK 检测器就简化为标准的两通道非相干检测器。实际上,滤波器能够实现与不同信号匹配,所以一个通道也足够了。DPSK 的信号包络图恒定不变,图 4.25 中滤波器与信号包络匹配(在两个码元周期上),这意味着什么呢?它告诉我们,可以如图 4.17 中的正交接收一样,采用能量检测器,在时间间隔(
0
⩽
t
⩽
2
T
0\leqslant t \leqslant2T
0⩽t⩽2T)内, 每个信号对应的
I
I
I 和
Q
Q
Q 通道参考信号如下:
s
1
(
t
)
I
参考信号:
2
T
cos
ω
0
t
,
2
T
cos
ω
0
t
s
1
(
t
)
Q
参考信号:
2
T
sin
ω
0
t
,
2
T
sin
ω
0
t
\begin{aligned} &s_1\left( t \right) \;I\text{参考信号:}\sqrt{\frac{2}{T}}\cos \omega _0t,\sqrt{\frac{2}{T}}\cos \omega _0t \\ &s_1\left( t \right) \;Q\text{参考信号:}\sqrt{\frac{2}{T}}\sin \omega _0t,\sqrt{\frac{2}{T}}\sin \omega _0t \end{aligned}
s1(t)I参考信号:T2cosω0t,T2cosω0ts1(t)Q参考信号:T2sinω0t,T2sinω0t
s
2
(
t
)
I
参考信号:
2
T
cos
ω
0
t
,
−
2
T
cos
ω
0
t
s
2
(
t
)
Q
参考信号:
2
T
sin
ω
0
t
,
−
2
T
sin
ω
0
t
\begin{aligned} &s_2\left( t \right) \;I\text{参考信号:}\sqrt{\frac{2}{T}}\cos \omega _0t,-\sqrt{\frac{2}{T}}\cos \omega _0t \\ &s_2\left( t \right) \;Q\text{参考信号:}\sqrt{\frac{2}{T}}\sin \omega _0t,-\sqrt{\frac{2}{T}}\sin \omega _0t \end{aligned}
s2(t)I参考信号:T2cosω0t,−T2cosω0ts2(t)Q参考信号:T2sinω0t,−T2sinω0t
由于 DPSK 信号对是正交的,因而这种非相干检测的误比特率可由
P
B
=
1
2
exp
(
−
E
b
2
N
0
)
P_B=\dfrac{1}{2}\exp \left( -\dfrac{E_b}{2N_0} \right)
PB=21exp(−2N0Eb) 得到。但 DPSK 信号比特间隔为
2
T
2T
2T,故如前面定义的信号
s
i
(
t
)
s_i\left(t\right)
si(t) 的能量,是定义在一个码元周期内信号能量的 2 倍。这样,
P
B
P_B
PB 表达式可写成
P
B
=
1
2
exp
(
−
E
b
N
0
)
P_B=\dfrac{1}{2}\exp \left( -\dfrac{E_b}{N_0} \right)
PB=21exp(−N0Eb)上式的函数曲线见图 4.24,标有差分相干 DPSK。此误比特率的表达式适用于图 4.16c 的最优DPSK 检测器,而图 4.16b 所示检测器的误差性能则略低于上式给定的误差性能。将上式同相干 PSK(如图 4.24)的误差性能做比较,在相同的
P
B
P_B
PB(
P
B
⩽
1
0
−
4
P_B\leqslant 10^{-4}
PB⩽10−4)下, DPSK 的
E
b
/
N
0
E_b/N_0
Eb/N0比 BPSK 要高 1 dB 左右。由于 DPSK 接收器不需要相位同步,故比 PSK 系统较容易实现。这就是通常选择 DPSK 系统的原因,虽然其效率要低于 PSK。
7.6 各种调制类型误比特率的比较
以上讨论了各种二进制调制方式的 P B P_B PB 表达式,列于表 4.1 中,其曲线函数见图 4.24。在 P B = 1 0 − 4 P_B =10^{-4} PB=10−4 时,性能最好(相干 PSK) 和性能最坏(非相干正交 FSK) 的调制方式之间相差大约 4 dB。
- 在某些情况下,4 dB 是很小的代价,却能换来实现上的简便性,即由相干 PSK 变成非相干 FSK;
- 但在另外一些场合,能够提高 1 dB 都是非常有用的。
除了 P B P_B PB 和系统复杂性,还需要考虑其他因素,例如,在某些场合(如随机衰落信道),通常采用非相干系统,因为这时在接收端很难得到相干参考载波。而在军事和空间应用中,则要求信号经过严重干扰后,仍然能够被检测出。
|
| P B P_B PB |
|---|---|
| PSK(相干) | Q ( 2 E b N 0 ) Q\left(\sqrt{\frac{2E_b}{N_0}}\right) Q(N02Eb) |
| DPSK(差分相干) | 1 2 exp ( − E b N 0 ) \frac12\exp\left(-\frac{E_b}{N_0}\right) 21exp(−N0Eb) |
| 正交 FSK(相干) | Q ( E b N 0 ) Q\left(\sqrt{\frac{E_b}{N_0}}\right) Q(N0Eb) |
| 正交 FSK(非相干) | 1 2 exp ( − E b 2 N 0 ) \frac12\exp\left(-\frac{E_b}{2N_0}\right) 21exp(−2N0Eb) |
8. M 进制信号及其性能
8.1 理想误比特率性能
图 3.5 所示为典型的误差性能对
E
b
/
N
0
E_b/N_0
Eb/N0 的曲线图,其形状像一个瀑布。图 4.24 所示为 AWGN 下不同二进制调制方式的误比特率性能
P
B
P_B
PB,也呈现为瀑布形状。理想的
P
B
P_B
PB 对
E
b
/
N
0
E_b/N_0
Eb/N0 是怎样的呢?图 4.26 说明了香农极限(Shannon limit)的理想曲线,该极限表示
E
b
/
N
0
E_b/N_0
Eb/N0 的门限值,门限值以下就不能进行可靠的通信。Part 9 将详细介绍香农理论。

现在描述一下图 4.26 的理想曲线。香农极限值 − 1.6 dB -1.6\text{ dB} −1.6 dB 以上的所有 E b / N 0 E_b/N_0 Eb/N0, 其对应的 P B P_B PB 都为 0。一旦 E b / N 0 E_b/N_0 Eb/N0 下降到香农极限以下, P B P_B PB 取得最坏值则为 1 2 \dfrac12 21(注意, 对于二进制系统, P B = 1 P_B=1 PB=1 并不是最坏的情况,这个值同 P B = 0 P_B=0 PB=0 的意义一样;如果比特差错率为 100%, 那么只要取比特流的反转就可以得到正确的数据流)。必须搞清楚的一点是,从图 4.26 中典型的凡曲线与理想曲线的比较中看到,图中的大箭头表示提高几时性能曲线的移动方向。
8.2 M M M 进制信号
回顾 M M M 进制信号发送过程,处理器同时考虑 k k k 比特信息,指示调制器产生 M = 2 k M=2^k M=2k 个波形中的一个。 k = 1 k=1 k=1 为特殊情况,即二进制信号。那么 M M M 进制信号误差性能是提高还是降低了呢?
- 图 4.27 所示为高斯信道上 M M M 进制正交信号相干检测的误比特率 P B ( M ) P_B\left(M\right) PB(M) 对 E b / N 0 E_b/N_0 Eb/N0 的曲线图;
- 图 4.28 所示为高斯信道上相干 M M M 进制多相信号的误比特率 P B ( M ) P_B\left(M\right) PB(M) 对 E b / N 0 E_b/N_0 Eb/N0 的曲线图。
随着 k k k(或 M M M)的增加,曲线朝哪个方向运动呢?由图 4.26 可知曲线的运动方向决定了误差性能是提高还是降低。
这种运动告诉我们,
M
M
M 进制正交信号误差性能得到提高,而
M
M
M 进制多相信号误差性能则降低了。这种理解是否正确? 如果与二进制 PSK 相比误差性能降低了,但为什么还有人采用
M
M
M 进制PSK 信号呢?的确许多系统采用的是多相信号。答案是误差性能对
E
b
/
N
0
E_b/N_0
Eb/N0 仅仅只是一个衡量指标,还有其他的指标(如带宽、吞吐量、复杂性及开销),但图 4.27 和图 4.28 只涉及到了误差性能。


由图 4.27 和图 4.28 并不能清楚地看出另一个性能指标,即系统带宽。
- 对于图 4.27 的 M M M 进制正交信号来说,随着 k k k 的增加,所需的带宽也增加。
- 对于图 4.28 的 M M M 进制多相信号,随着 k k k 的增加,同样的带宽能够支持更大的比特速率。换言之,相同的数据速率,需要的带宽减少了。
因此,从误差性能曲线上看出, M M M 进制正交信号和 M M M 进制多相信号成为权衡一个系统性能的手段。正交信号可以用带宽换取误差性能的提高,多相信号则可以用误差性能换取带宽。误差性能同带宽性能作为通信中最基本的权衡手段,将在 Part 9 中详细介绍。
8.3 MPSK 信号的矢量图
图 4.29 给出了
M
=
2
,
4
,
8
M=2, 4, 8
M=2,4,8 和
16
16
16 时的 MPSK 信号集。图 4.29a 为二进制(
k
=
1
,
M
=
2
k=1, M=2
k=1,M=2)相位相差
180
°
180\degree
180° 的对极矢量
s
1
\mathbf{s}_1
s1 和
s
2
\mathbf{s}_2
s2,判决线将判决区域分成两个区域。该图说明了在噪声矢量
n
\mathbf{n}
n 的幅度等于
s
1
\mathbf{s}_1
s1 的情况下,使得检测器发生符号判决错误的具有最小能量的噪声矢量的幅度和方向。

图 4.29b 为 4 进制( k = 2 , M = 4 k=2 , M=4 k=2,M=4)矢量,相位相差 90 ° 90\degree 90°。判决边界(只画出一条线)将信号空间分成 4 个区域,同样图中也画出了导致判决器发生判决错误的最小能量噪声矢量(从信号矢量顶点沿法线逼近判决边界)。注意,图 4.29b 的最小能量噪声矢量比图 4.29a 的要小,这表明 4 进制系统比二进制系统更易受噪声干扰(两个例子中信号能量相等)。继续对图 4.29c 的 8 进制和图 4.29d 的 16 进制进行分析,很显然随着 M M M 的增加, 信号平面上挤入了越来越多的信号矢量,矢量之间靠得更紧,导致判决错误的噪声能量也越来越小。
通过图 4.29 ,我们更能理解为何随着 k k k 的增加会得出图 4.28 的曲线,也更能理解多相信号的基本权衡问题。增加信号空间上的信号矢量,等价于不增加系统带宽就提高了数据速率(这些矢量限制在同一个平面上)。换句话说,牺牲了误差性能换取带宽的利用率。观察图 4.29d ,怎样权衡才能使得相邻信号矢量之间的距离增加到如图 4.29a 所示的距离呢? 可以提高信号能量(拉长信号矢量),直到信号矢量的顶点到判决线的距离与图 4.29a 的噪声矢量长度相等。因此,在多相系统中,随着 M M M 的增加,我们既可以牺牲误差性能换取带宽性能,也可以提高 E b / N 0 E_b/N_0 Eb/N0 以避免误差性能的降低,这样就可以通过增加 E b / N 0 E_b/N_0 Eb/N0 来提高带宽性能。
注意,图 4.29 画出的 M M M 进制信号中,所有矢量都具有同样的长度, 等价于在固定的 E b / N 0 E_b/N_0 Eb/N0 基础上进行比较, E s E_s Es 是码元能量。也可以画出固定 E b / N 0 E_b/N_0 Eb/N0 下的图,图中的矢量幅度将随着 M M M 的增加而增加。 M = 4 , 8 , 16 M=4, 8, 16 M=4,8,16 时的矢量长度分别是 M = 2 M=2 M=2 时矢量长度的拉 2 \sqrt{2} 2, 3 \sqrt{3} 3 和 2 倍。同时随着 M M M 的增加,信号矢量更为拥挤,也更易受噪声干扰,但与图 4.29 的表现不一样。
8.4 BPSK 和 QPSK 具有相同的误比特率
《Part 3——基带信号解调与检测》的 1.4 小节得出了
E
b
/
N
0
E_b/N_0
Eb/N0 和
S
/
N
S/N
S/N 之间的一般关系,如下所示:
E
b
N
0
=
S
N
(
W
R
)
\frac{E_b}{N_0}=\frac{S}{N}\left( \frac{W}{R} \right)
N0Eb=NS(RW)其中,
S
S
S 是平均信号功率,
R
R
R 是比特速率。给定
P
B
P_B
PB, 由图 4.28 中
k
=
1
k=1
k=1 的曲线可得到 BPSK 的
E
b
/
N
0
E_b/N_0
Eb/N0,QPSK 可由两个正交 BPSK 通道表征。通常 QPSK 比特流可分成偶分量和奇分量(
I
I
I 和
Q
Q
Q)流, 每个新到的比特流以原来比特速率的一半调制载波的正交分量。
I
I
I 流调制
cos
ω
0
t
\cos\omega_0t
cosω0t,
Q
Q
Q 流调制
sin
ω
0
t
\sin\omega_0t
sinω0t。如果 QPSK 矢量幅度为
A
A
A,则
I
I
I 和
Q
Q
Q 分量矢量幅度为
A
2
\dfrac{A}{\sqrt{2}}
2A,如图 4.30 所示。所以每个正交 BPSK 信号的平均功率是 QPSK 信号的一半。这样,如果 QPSK 波形比特速率为
R
b/s
R\text{ b/s}
R b/s,平均功率为
S
W
S\text{ W}
S W,则每个 BPSK 波形的正交分量具有
R
2
b/s
\dfrac R2\text{ b/s}
2R b/s 的比特速率和
S
2
W
\dfrac S2\text{ W}
2S W 的平均功率。

因此, QPSK 信号的
E
b
/
N
0
E_b/N_0
Eb/N0 可由每个正交 BPSK 通道的E/N。来刻画, 可写成
E
b
N
0
=
S
/
2
N
0
(
W
R
/
2
)
=
S
N
0
(
W
R
)
\frac{E_b}{N_0}=\frac{S/2}{N_0}\left( \frac{W}{R/2} \right) =\frac{S}{N_0}\left( \frac{W}{R} \right)
N0Eb=N0S/2(R/2W)=N0S(RW)这与之前的式子等价。
每个正交的 BPSK 通道和混合而成的 QPSK 都具有相同的 E b / N 0 E_b/N_0 Eb/N0 和 P B P_B PB,QPSK 信号相邻码元间有 90 ° 90\degree 90° 相移的这种正交性,使得它与 BPSK 信号有相同的误比特率。还必须注意一点, BPSK 和 QPSK 信号的误码率并不相同,误码率和误比特率之间的关系见 9.3 小节和 9.4 小节。QPSK 等效成两个正交的 BPSK 通道,这种思想可以有效地拓展到 M M M 进制振幅 / 相位信号中,如后续会介绍的正交幅度调制(QAM)。
8.5 MFSK 信号的矢量图
从 8.3 小节中的图 4.29 可以了解到,为何随着
k
k
k(或
M
M
M)的增加,MPSK 信号的误差性能会有所降低。可以做出与图 4.27 相似的正交 MFSK 信号的误差性能曲线。MFSK 信号空间可由
M
M
M 条互相垂直的坐标轴描述, 所以很容易画出
M
=
2
M=2
M=2 和
M
=
3
M= 3
M=3 的例子。图 4.31a 为相差
90
°
90\degree
90° 的二进制正交矢量
s
1
\mathbf{s}_1
s1 和
s
2
\mathbf{s}_2
s2,判决边界将信号空间分成两个区域。图中的噪声矢量
n
\mathbf{n}
n 表示导致检测器判决错误所需的最小噪声矢量。

图 4.31b 给出坐标轴之间夹角为 90 ° 90\degree 90° 的三进制信号空间,判决平面将信号空间分割成 3 个区域。每个发送信号矢量 s 1 \mathbf{s}_1 s1, s 2 \mathbf{s}_2 s2 和 s 3 \mathbf{s}_3 s3 上都叠加了噪声矢量 n \mathbf{n} n ,图中每个噪声矢量都是导致检测器判决错误的最小噪声矢量,图 4.31b 和图 4.31a 中的最小噪声矢量具有相同的长度。4.4 小节提到,已知发送信号的能量, M M M 进制正交信号空间中两个发送信号矢量 s i \mathbf{s}_i si 和 s j \mathbf{s}_j sj 之间的距离是常数。因此随着 M M M 的增加,若发送信号矢量之间的距离以及任意的判决边界均保持不变,在 MPSK 信号集中加入新的信号,则使信号受到干扰的最小噪声矢量将变小。与 MPSK 不同,将新的信号加入到 MFSK 信号集中,并不会改变干扰信号的最小噪声矢量大小。
不可能继续画出更高维数的正交信号空间,只能运用我们的大脑去理解,随着信号集 M M M 的增加(通过增加坐标轴,每个新增加的坐标轴均与其他坐标轴互相垂直),信号矢量之间并没有靠得更紧密, 相应地,正交信号集中的发送信号并不会更容易受噪声干扰。事实上, 从图 4.27 可以看出,随着 k k k 的增加, 误比特率的性能增加了。
比较误码率(
P
E
P_E
PE)对未归一化的 SNR 的曲线和
P
E
P_E
PE 对
E
b
/
N
0
E_b/N_0
Eb/N0 的曲线,很容易理解如图 4.27 所示的正交信号误差性能的改善。图 4.32 画出了一组相干 FSK 信号的
P
E
P_E
PE 性能曲线。可以看到,随着
M
M
M 的增加,
P
E
P_E
PE 误码率性能降低了。前面说过,正交信号集增大并不会使发送信号更容易受噪声干扰,对于给定 SNR 的正交信号来说,这无疑是正确的。干扰发送信号使其进入一个错误区域的噪声矢量大小是固定的,随着
M
M
M 的增加,信号并没有变得更容易受较小噪声干扰。但是,
M
M
M 增加时,引入了更多相邻的判决区域,因此码元发生错误的方式在数量上增加了。图 4.32 反映了随着
M
M
M 的增加,
P
E
P_E
PE 误对未归一化 SNR 曲线越来越恶化,发生一个错误的方式有(
M
−
1
M-1
M−1)种。固定 SNR 时,考虑性能(随
M
M
M 增加)对于数字通信没有多大用处,固定 SNR 意味着单位码元的能量是一定的,
M
M
M 增大时,相当于把这些固定大小的能量分配到更多比特信息上,从而每比特所包含的能量就减少了。比较数字系统的一种非常有用的方式是基于单位比特的 SNR 或
E
b
/
N
0
E_b/N_0
Eb/N0。画出关于
E
b
/
N
0
E_b/N_0
Eb/N0 的差错概率曲线,只有在这种情况下,随着
M
M
M 增加误差性能才得到改善(见图 4.27)。这时对于固定的 SNR,
E
b
/
N
0
E_b/N_0
Eb/N0(满足给定的差错概率) 随着
M
M
M 的增加而减小了。因此有必要将图 4.32 中的各点映射到新的点上,与图 4.27 相似, 横坐标由
E
b
/
N
0
E_b/N_0
Eb/N0 代替SNR 。图 4.33 画出了这种映射,表明了曲线由
P
E
P_E
PE 随着
M
M
M 增加而恶化(如图 4.32)变成
P
E
P_E
PE 随着
M
M
M 增加而改善。上面已经给出了基本的映射关系式,重复如下:
E
b
N
0
=
S
N
(
W
R
)
\frac{E_b}{N_0} =\frac{S}{N}\left( \frac{W}{R} \right)
N0Eb=NS(RW)其中,
W
W
W 为检测带宽。由于
R
=
log
2
M
T
=
k
T
R=\frac{\log _2M}{T}=\frac{k}{T}
R=Tlog2M=Tk
T
T
T 为码元周期,于是可写成
E
b
N
0
=
S
N
(
W
T
log
2
M
)
=
S
N
(
W
T
k
)
\frac{E_b}{N_0}=\frac{S}{N}\left( \frac{WT}{\log _2M} \right) =\frac{S}{N}\left( \frac{WT}{k} \right)
N0Eb=NS(log2MWT)=NS(kWT)对于 FSK 信号,检测带宽
W
W
W(单位为
Hz
\text{Hz}
Hz)数值上显然等于码元速率
1
T
\dfrac{1}{T}
T1,或者说,
W
T
=
1
WT = 1
WT=1。因此,
E
b
N
0
≈
S
N
(
1
k
)
\boxed{\frac{E_b}{N_0}\approx \frac{S}{N}\left( \frac{1}{k} \right) }
N0Eb≈NS(k1)


图 4.33 中对应“圆点”的几个数字说明了 M M M 进制正交信号相干检测时关于 SNR 的 P E P_E PE 到关于 E b / N 0 E_b/N_0 Eb/N0 的 P E P_E PE 之间的映射关系。图 4.33a 中,
- 在 k = 1 k=1 k=1 的曲线上取了一点对应着 P E = 1 0 − 3 , SNR = 10 dB P_E=10^{-3},\ \text{SNR}=10\text{ dB} PE=10−3, SNR=10 dB。
- 在 k = 10 k= 10 k=10 曲线上也取一点, P E P_E PE 相同但 SNR = 13 dB \text{SNR}=13\text{ dB} SNR=13 dB(从图 4.32 取得近似值)。
这样清楚地看到了 k k k 增加带来的误差性能恶化。为了理解性能改善的来源,我们将横坐标从 SNR 的非线性标度分贝转换成线性标度——比例因子。如图 4.33a 所示, k = 1 k=1 k=1 和 k = 10 k= 10 k=10 时SNR 作为比例因子分别对应 10 和 20;接着进一步把横坐标转换成每比特的 SNR(表示为比例因子),由图 4.33a 可以看出, k = 1 k=1 k=1 和 k = 10 k= 10 k=10 时分别对应 10 和 2 。很容易想到 1024 进制码元或波形( k = 10 k=10 k=10)和 10 比特意义一样。因此,如果一个码元需要 20 个单位的 SNR,那么属于该码元的 10 比特也需要同样的 20 个单位,换句话说,每比特需要 2 个单位。
不用经过这种计算也可以将 k = 1 k=1 k=1 和 k = 10 k= 10 k=10 的情况映射到如图 4.33b 所示的平面上,以表示关于 E b / N 0 E_b/N_0 Eb/N0 的 P E P_E PE。 k = 1 k=1 k=1 的情况看上去和图 4.33a 基本上完全一样,但 k = 10 k= 10 k=10 时发生了有趣的变化。很容易看出,与二进制 10 个单元( 10 dB 10\text{ dB} 10 dB)相比, k = 10 k=10 k=10 的码元仅需要 2 单元( 3 dB 3\text{ dB} 3 dB)的 E b / N 0 E_b/N_0 Eb/N0。 k = 10 k= 10 k=10 时映射到 E b / N 0 E_b/N_0 Eb/N0 可由 E b N 0 ≈ S N ( 1 k ) \dfrac{E_b}{N_0}\approx\dfrac{S}{N}\left(\dfrac{1}{k}\right) N0Eb≈NS(k1) 计算得到: E b / N 0 = 20 × ( 1 / 10 ) = 2 E_b/N_0 = 20\times(1/10)=2 Eb/N0=20×(1/10)=2(或 3 dB 3\text{ dB} 3 dB),说明 k k k 增加也带来了误差性能的改善。在数字通信系统中,经常考虑 E b / N 0 E_b/N_0 Eb/N0 形式的误差性能,因为它有助于在两个系统性能之间进行更有意义的比较, 因此一般很少见到图 4.32 和图 4.33a 的曲线图。
尽管图 4.32 很少见到,但还是可以利用它来了解 M M M 或 k k k 增加时正交信号误差性能改善的原因。我们可以把它和购买商品做类比, 比如购买 A 级的白软干酪。等级的选择对应着 P E P_E PE 轴上的某些点,如 1 0 − 3 10^{-3} 10−3,从这个点做一条水平线通过所有的曲线(从 M = 2 M= 2 M=2 到 M = 1024 M=1024 M=1024)。在杂货店里我们买了最小盒的白软干酪,2 盎司花了1 美元。把这次购买对应于如图 4.32 中所做的水平线与曲线 M = 2 M= 2 M=2 的交点,得到相应的 SNR,其横轴上的截距认为是花去的费用 1 美元。第二次购买干酪,我们考虑到第一次购买每盎司花了 50 美分,于是决定购买更大盒的干酪,8 盎司花了2 美元。将这次购买对应到水平线与曲线 M = 8 M=8 M=8 的交点,读出其对应的 SNR,将截距看做花去的费用 2 美元。注意,当我们购买更大盒的干酪,花去的费用上去了,但因为质量更大,每盎司的价格仍然是下降的(这次购买每盎司只花了 25 美分)。继续用购买来类比,当我们购买越来越大盒的干酪,花去的费用(SNR)也越来越高,但每盎司的价格却越来越低。这是一个很老的问题,称为规模经济(economy of scale)。同时购买相当于批发规模数批的商品, 其单位价格就会更低。同样,当我们使用包含更多比特的码元作为正交信号的时候,也需要更大的功率(更多 SNR),但每比特所需的 E b / N 0 E_b/N_0 Eb/N0 减少了。
9. M M M 进制系统的误码性能( M > 2 M>2 M>2)
9.1 MPSK 的误码率
在大信噪比情况下,等概
M
M
M 进制 PSK 信号相干检测时,误码性能
P
E
(
M
)
P_E\left(M\right)
PE(M) 可表示为
P
E
(
M
)
≈
2
Q
(
2
E
s
N
0
sin
π
M
)
P_E\left( M \right) \approx 2Q\left( \frac{2E_s}{N_0}\sin \frac{\pi}{M} \right)
PE(M)≈2Q(N02EssinMπ)其中,
P
E
(
M
)
P_E\left(M\right)
PE(M) 为误码率,
E
s
=
E
b
(
log
2
M
)
E_s=E_b\left(\log_2M\right)
Es=Eb(log2M) 是单位码元的能量,
M
=
2
k
M=2^k
M=2k 是码元集的大小。图 4.34 画出了MPSK 信号相干检测时关于
E
b
/
N
0
E_b/N_0
Eb/N0 的
P
E
(
M
)
P_E\left(M\right)
PE(M) 性能曲线。

类似地,
M
M
M 进制 DPSK 信号差分相干检测时的误码率性能可(对于大
E
b
/
N
0
E_b/N_0
Eb/N0)表示为
P
E
(
M
)
≈
2
Q
(
2
E
s
N
0
sin
π
2
M
)
P_E\left( M \right) \approx 2Q\left( \frac{2E_s}{N_0}\sin \frac{\pi}{\sqrt{2}M} \right)
PE(M)≈2Q(N02Essin2Mπ)
9.2 MFSK 的误码率
等概
M
M
M 进制正交信号相干检测时的误码率
P
E
(
M
)
P_E\left( M \right)
PE(M) 上界为
P
E
(
M
)
⩽
(
M
−
1
)
Q
E
s
N
0
P_E\left( M \right) \leqslant \left( M-1 \right) Q\sqrt{\frac{E_s}{N_0}}
PE(M)⩽(M−1)QN0Es其中,
E
s
=
E
b
(
log
2
M
)
E_s=E_b\left(\log_2M\right)
Es=Eb(log2M) 是单位码元的能量,
M
M
M 是码元集的大小。图 4.35 画出了
M
M
M 进制正交信号相干检测时关于
E
b
/
N
0
E_b/N_0
Eb/N0 的
P
E
(
M
)
P_E\left(M\right)
PE(M) 性能曲线。

等概
M
M
M 进制正交信号非相干检测时的误码率性能为
P
E
(
M
)
=
1
M
exp
(
−
E
s
N
0
)
∑
j
=
2
M
(
−
1
)
j
(
M
j
)
exp
(
E
s
j
N
0
)
P_E\left( M \right) =\frac{1}{M}\exp \left( -\frac{E_s}{N_0} \right) \sum_{j=2}^M{\left( -1 \right) ^j\left( \begin{array}{c} M\\ j\\ \end{array} \right) \exp \left( \frac{E_s}{jN_0} \right)}
PE(M)=M1exp(−N0Es)j=2∑M(−1)j(Mj)exp(jN0Es)其中
(
M
j
)
=
M
!
j
!
(
M
−
j
)
!
\left( \begin{array}{c} M\\ j\\ \end{array} \right) =\frac{M!}{j!\left( M-j \right) !}
(Mj)=j!(M−j)!M!是标准二项分布系数,表示
M
M
M 个码元中发生
j
j
j 个码元错误的组合数目。注意,对于二进制情况,误码性能简化为
P
B
=
1
2
exp
(
−
E
b
2
N
0
)
P_B=\frac{1}{2}\exp \left( -\frac{E_b}{2N_0} \right)
PB=21exp(−2N0Eb)此结果与二进制正交 FSK 非相干检测的误比特率相同。图 4.36 画出了
M
M
M 进制正交信号非相干检测时关于
E
b
/
N
0
E_b/N_0
Eb/N0 的
P
E
(
M
)
P_E\left(M\right)
PE(M) 性能曲线。把非相干正交信号的
P
E
(
M
)
P_E\left(M\right)
PE(M) 性能与图 4.35 相干正交信号
P
E
(
M
)
P_E\left(M\right)
PE(M) 的性能做比较,可以看出,在
k
>
7
k>7
k>7 时,其差异可以忽略。与非相干正交信号一样,可以得到相干正交信号误码率上限:
P
E
(
M
)
<
M
−
1
2
exp
(
−
E
s
2
N
0
)
P_E\left( M \right) <\frac{M-1}{2}\exp \left( -\frac{E_s}{2N_0} \right)
PE(M)<2M−1exp(−2N0Es)其中,
E
s
E_s
Es 是单位码元的能量,
M
M
M 是码元集的大小。

9.3 正交信号误比特率和误码率之比较
可以证明,
M
M
M 进制正交信号集的误比特率(
P
B
P_B
PB)与误码率(
P
E
P_E
PE)之间的关系为
P
B
P
E
=
2
k
−
1
2
k
−
1
=
M
/
2
M
−
1
\frac{P_B}{P_E}=\frac{2^{k-1}}{2^k-1}=\frac{M/2}{M-1}
PEPB=2k−12k−1=M−1M/2
k
k
k 趋向无穷大时,得到
lim
k
→
∞
P
B
P
E
=
1
2
\lim_{k\rightarrow \infty} \frac{P_B}{P_E}=\frac{1}{2}
k→∞limPEPB=21 举个简单的例子可以说明上述误比特率(
P
B
P_B
PB)与误码率(
P
E
P_E
PE)之间的关系在直觉上是成立的。图 4.37 给出的是 8 进制信号集;发送的信息码元(假定等概)为正交波形,如 FSK。对于正交信号,一个判决错误会把正确的信号等概地变换成另外
M
−
1
M-1
M−1 个不正确的波形之一。图 4.37 的例子表明发送码元由 011 组成,错误等概地发生在其他的
2
k
−
1
=
7
2^k-1=7
2k−1=7 个码元上。注意,一个码元发生错误并不意味着这个码元的所有比特位都是错误的。图 4.37 中,如果接收器判定发送码元为表中的底部一行,即 111,则发送码元的 3 个位有 2 个是正确的,仅仅只有一个是错误的。显然
P
B
P_B
PB 总是比
P
E
P_E
PE 小(记住,
P
B
P_B
PB 和
P
E
P_E
PE 反映了平均出错频率)。

考虑图 4.37 中任意一列比特位,必然由
50
%
50\%
50% 的 1 和
50
%
50\%
50% 的 0 组成。对于发送码元的第一位(最右端列),总共有多少种发生错误变成二进制 1 的可能?应该有
2
k
−
1
=
4
2^{k- 1}= 4
2k−1=4 种(每列有 4 个地方出现 0)发生比特错误的可能,其他每列都是这样。上述正交信号的
P
B
P
E
\dfrac{P_B}{P_E}
PEPB 最后关系式可由下面的比率得到:发生比特错误的可能数(
2
k
−
1
2^{k- 1}
2k−1)除以码元发生错误的可能数(
2
k
−
1
2^{k}- 1
2k−1),图 4.37 的例子中,
P
B
P
E
=
4
7
\dfrac{P_B}{P_E}=\dfrac{4}{7}
PEPB=74。
9.4 多相信号误比特率与误码率之比较
与 MFSK 信号一样,MPSK 信号的
P
B
P_B
PB 小于或等于
P
E
P_E
PE。但两者有很大的不同。正交信号是等概选取这
M
−
1
M-1
M−1 个错误的码元, 而对于 MPSK 信号, 每个信号矢量到其他矢量的距离是不等距的。图 4.38a 描绘了由二进制表示的 8 进制码元的判决空间,其判决区域为饼形。假设发送码元为 011,如果有一个错误发生,则发送码元可能被误认为最接近的码元,010 或 100,而将 010 误认为 111 的概率是非常小的。如果采用图 4.38a 码元判决区域中二进制序列比特位的指定关系,则某些码元错误会导致 2 位或更多位的比特错误,甚至在大信噪比下也是如此。

对于非正交信号如 MPSK,经常采用某种二进制到
M
M
M 进制的编码,这样使得二进制序列对应的码元与其相邻的码元仅仅相差一位(相位变换)。当
M
M
M 进制的码元发生错误时,最有可能发生错误的是
k
k
k 个输入比特中的一个。具有这种特性的一种码是格雷码,图 4.38b 所示为对 8 进制 PSK 用格雷码指定比特到波形的对应关系,从图中看出相邻码元之间仅仅相差了一位。因此在已知码元错误的情况下,与图 4.38a 未编码二进制指定关系相比,格雷码使得多比特错误率大大降低。格雷码的实现只代表了数字通信中的一种应用,不用付出任何代价就能获得很大好处,并且格雷码只是一种指定关系,并不需要专门或额外的电路。采用格雷码后误比特率变为
P
B
≈
P
E
log
2
M
(
P
E
≪
1
)
P_B\approx \frac{P_E}{\log _2M}\left( P_E\ll 1 \right)
PB≈log2MPE(PE≪1)由 8.4 小节,BPSK 和 QPSK 信号有相同的误比特率。由上式可证,两者误码率并不相同。BPSK 中
P
E
=
P
B
P_E=P_B
PE=PB,而对于 QPSK,
P
E
≈
2
P
B
P_E\approx2P_B
PE≈2PB。
9.5 码间串扰的影响
《Part 3——基带信号解调与检测》和前面一节讨论的 AWGN 下信号检测问题都是基于无码间串扰(ISI)假设的,零均值 AWGN 过程可以只由其方差来表征,这样使分析变得简单。实际上,ISI 是需要考虑的另一个干扰因素,在《Part 3——基带信号解调与检测》的第 3 节中介绍过,由于采用了带通滤波器而在发送输出端、信道上或接收输入端产生了 ISI,这种干扰同时降低了相干和非相干接收的误差性能。由于 ISl 涉及到信道的冲激响应,因此,在 ISI 和 AWGN 干扰下误差性能的计算也相当复杂。这里不再继续讨论。
10. 小结
本文主要介绍了一些基本的带通调制方式,尤其是相移键控(PSK)和频移键控(FSK)。我们从几何角度分析了信号矢量和噪声矢量,尤其是对极和正交信号集。在几何上,根据正交信号空间和信号区域研究了信号检测问题。了解了信号空间和导致发送信号进入错误区域的噪声矢量,就很容易理解检测问题以及各种调制解调技术的性能。Part 9 将再次考察调制和解调问题,并且研究调制技术带宽效率问题。

















 270
270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









