




 这篇博客讨论了在处理大量数据时,如何通过矩阵和向量操作来提高从灰度图到彩色图转换的效率。文章中比较了三种方法:逐像素遍历、np.vectorize和矩阵映射,结果显示矩阵映射方法速度最快。此外,还提供了将彩色图转换回灰度图的矩阵布尔运算方法。代码示例展示了具体实现过程。
这篇博客讨论了在处理大量数据时,如何通过矩阵和向量操作来提高从灰度图到彩色图转换的效率。文章中比较了三种方法:逐像素遍历、np.vectorize和矩阵映射,结果显示矩阵映射方法速度最快。此外,还提供了将彩色图转换回灰度图的矩阵布尔运算方法。代码示例展示了具体实现过程。
在语义分割时,为了方便可视化,需要将表示类别的灰度图,根据类别-颜色映射表,转换为彩色图
 转到
转到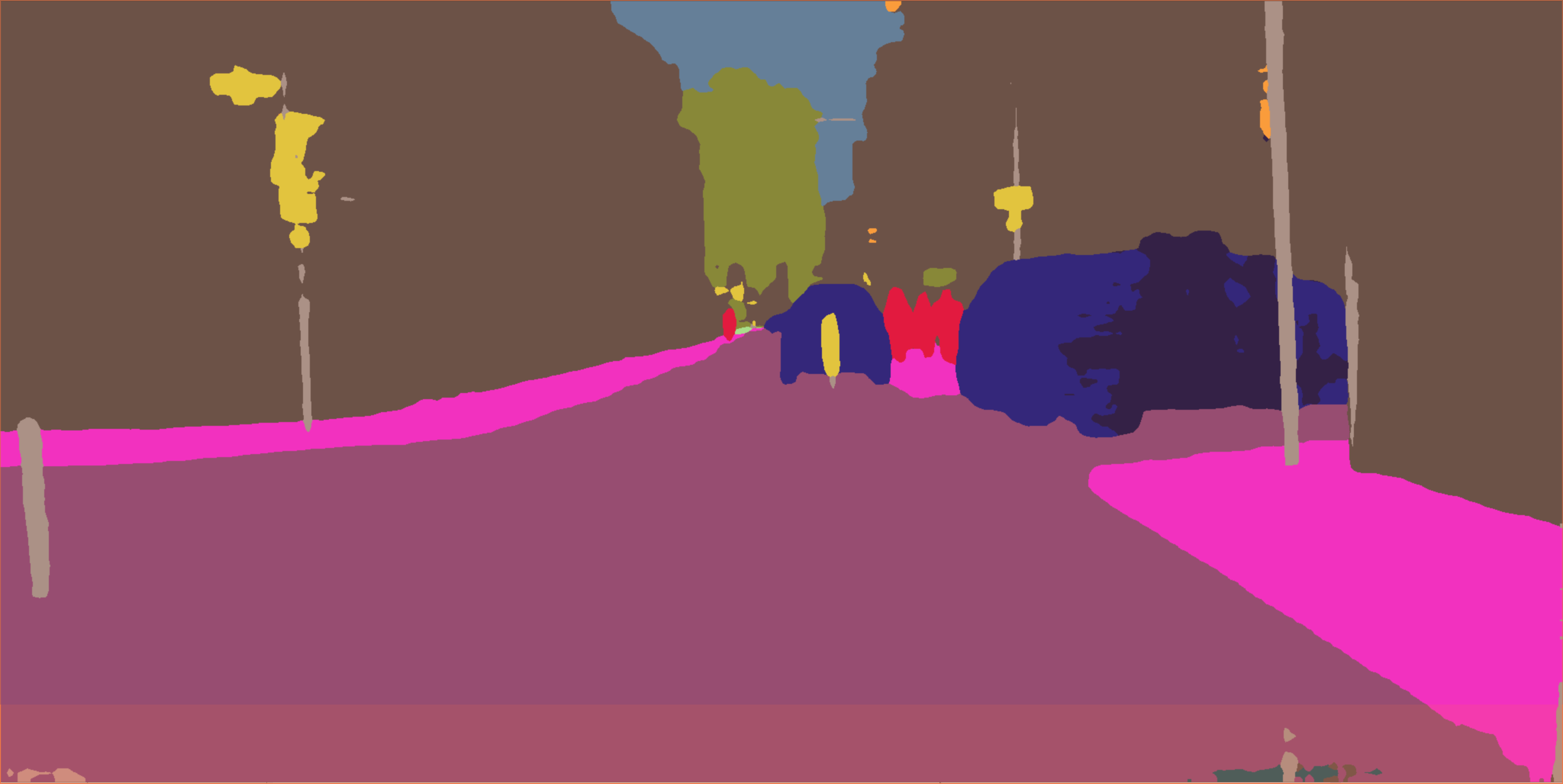
在数据量较大的情况下,使用逐像素遍历的方法速度极慢,使用矩阵、向量的操作方法可以极大提高运行速度
以GID的单个gt(7200*6800)为例:
1)gray转color
逐像素遍历赋值
np.vectorize按向量批量映射:7.56 秒,ref1
矩阵映射:1.62秒,ref2
2)color转gray
矩阵的布尔运算加布尔索引:4.78秒
# -*- coding: utf-8 -*-
# @Time : 2020/4/7 16:44
# @Author : Zhao HL
# @File : gt_visualizetion.py
import os, sys, time, cv2
import numpy as np
from collections import namedtuple
# 类别信息
gts_gray_path = r'/home/ubuntu/PycharmProjects/DataSet/cityscapes/val'
gts_color_path = r'/home/ubuntu/PycharmProjects/DataSet/cityscapes/val_color'
Cls = namedtuple('cls', ['name', 'id', 'color'])
Clss = [
Cls('road', 0, (128, 64,128)),
Cls('sidewalk', 1, (244, 35,232)),
Cls('building', 2, ( 70, 70, 70)),
Cls('wall', 3, (102,102,156)),
Cls('fence', 4, (190,153,153)),
Cls('pole', 5, (153,153,153)),
Cls('traffic light', 6, (250,170, 30)),
Cls('traffic sign', 7, (220,220, 0)),
Cls('vegetation', 8, (107,142, 35)),
Cls('terrain', 9, (152,251,152)),
Cls('sky', 10, ( 70,130,180)),
Cls('person', 11, (220, 20, 60)),
Cls('rider', 12, (255, 0, 0)),
Cls('car', 13, ( 0, 0,142)),
Cls('truck', 14, ( 0, 0, 70)),
Cls('bus', 15, ( 0, 60,100)),
Cls('train', 16, ( 0, 80,100)),
Cls('motorcycle', 17, ( 0, 0,230)),
Cls('bicycle', 18, (119, 11, 32))
]
# 转化val_tolabelsids这个类的时候用
# Clss = [
# # name id trainId category catId hasInstances ignoreInEval color
# Cls( 'unlabeled' , 0 , ( 0, 0, 0) ),
# Cls( 'ego vehicle' , 1 , ( 0, 0, 0) ),
# Cls( 'rectification border' , 2 , ( 0, 0, 0) ),
# Cls( 'out of roi' , 3 , ( 0, 0, 0) ),
# Cls( 'static' , 4 , ( 0, 0, 0) ),
# Cls( 'dynamic' , 5 , (111, 74, 0) ),
# Cls( 'ground' , 6 , ( 81, 0, 81) ),
# Cls( 'road' , 7 , (128, 64,128) ),
# Cls( 'sidewalk' , 8 , (244, 35,232) ),
# Cls( 'parking' , 9 , (250,170,160) ),
# Cls( 'rail track' , 10 , (230,150,140) ),
# Cls( 'building' , 11 , ( 70, 70, 70) ),
# Cls( 'wall' , 12 , (102,102,156) ),
# Cls( 'fence' , 13 , (190,153,153) ),
# Cls( 'guard rail' , 14 , (180,165,180) ),
# Cls( 'bridge' , 15 , (150,100,100) ),
# Cls( 'tunnel' , 16 , (150,120, 90) ),
# Cls( 'pole' , 17 , (153,153,153) ),
# Cls( 'polegroup' , 18 , (153,153,153) ),
# Cls( 'traffic light' , 19 , (250,170, 30) ),
# Cls( 'traffic sign' , 20 , (220,220, 0) ),
# Cls( 'vegetation' , 21 , (107,142, 35) ),
# Cls( 'terrain' , 22 , (152,251,152) ),
# Cls( 'sky' , 23 , ( 70,130,180) ),
# Cls( 'person' , 24 , (220, 20, 60) ),
# Cls( 'rider' , 25 , (255, 0, 0) ),
# Cls( 'car' , 26 , ( 0, 0,142) ),
# Cls( 'truck' , 27 , ( 0, 0, 70) ),
# Cls( 'bus' , 28 , ( 0, 60,100) ),
# Cls( 'caravan' , 29 , ( 0, 0, 90) ),
# Cls( 'trailer' , 30 , ( 0, 0,110) ),
# Cls( 'train' , 31 , ( 0, 80,100) ),
# Cls( 'motorcycle' , 32 , ( 0, 0,230) ),
# Cls( 'bicycle' , 33 , (119, 11, 32) ),
# Cls( 'license plate' , -1 , ( 0, 0,142) ),
# ]
def gray_color(color_dict, gray_path=gts_gray_path, color_path=gts_color_path):
'''
swift gray image to color, by color mapping relationship
:param color_dict:color mapping relationship, dict format
:param gray_path:gray imgs path
:param color_path:color imgs path
:return:
'''
pass
t1 = time.time()
gt_list = os.listdir(gray_path)
for index, gt_name in enumerate(gt_list):
gt_gray_path = os.path.join(gray_path, gt_name)
gt_color_path = os.path.join(color_path, gt_name)
gt_gray = cv2.imread(gt_gray_path, cv2.IMREAD_GRAYSCALE)
# print(gt_gray)
assert len(gt_gray.shape) == 2 # make sure gt_gray is 1band
# # region method 1: swift by pix, slow
# gt_color = np.zeros((gt_gray.shape[0],gt_gray.shape[1],3),np.uint8)
# for i in range(gt_gray.shape[0]):
# for j in range(gt_gray.shape[1]):
# gt_color[i][j] = color_dict[gt_gray[i][j]] # gray to color
# # endregion
# region method 2: swift by array
# gt_color = np.array(np.vectorize(color_dict.get)(gt_gray),np.uint8).transpose(1,2,0)
# endregion
# region method 3: swift by matrix, fast
gt_color = matrix_mapping(color_dict, gt_gray)
# endregion
gt_color = cv2.cvtColor(gt_color, cv2.COLOR_RGB2BGR)
cv2.imwrite(gt_color_path, gt_color)
process_show(index + 1, len(gt_list))
print(time.time() - t1)
def color_gray(color_dict, color_path=gts_color_path, gray_path=gts_gray_path, ):
'''
swift color image to gray, by color mapping relationship
:param color_dict:color mapping relationship, dict format
:param gray_path:gray imgs path
:param color_path:color imgs path
:return:
'''
gray_dict = {}
for k, v in color_dict.items():
gray_dict[v] = k
t1 = time.time()
gt_list = os.listdir(color_path)
print(gt_list)
for index, gt_name in enumerate(gt_list):
gt_gray_path = os.path.join(gray_path, gt_name)
gt_color_path = os.path.join(color_path, gt_name)
color_array = cv2.imread(gt_color_path, cv2.IMREAD_COLOR)
assert len(color_array.shape) == 3
gt_gray = np.zeros((color_array.shape[0], color_array.shape[1]), np.uint8)
b, g, r = cv2.split(color_array)
color_array = np.array([r, g, b])
for cls_color, cls_index in gray_dict.items():
cls_pos = arrays_jd(color_array, cls_color)
gt_gray[cls_pos] = cls_index
cv2.imwrite(gt_gray_path, gt_gray)
process_show(index + 1, len(gt_list))
print(time.time() - t1)
def arrays_jd(arrays, cond_nums):
r = arrays[0] == cond_nums[0]
g = arrays[1] == cond_nums[1]
b = arrays[2] == cond_nums[2]
return r & g & b
def matrix_mapping(color_dict, gt):
colorize = np.zeros([len(color_dict), 3], 'uint8')
for cls, color in color_dict.items():
colorize[cls, :] = list(color)
ims = colorize[gt, :]
ims = ims.reshape([gt.shape[0], gt.shape[1], 3])
return ims
def nt_dic(nt=Clss):
'''
swift nametuple to color dict
:param nt: nametuple
:return:
'''
pass
color_dict = {}
for cls in nt:
color_dict[cls.id] = cls.color
return color_dict
def process_show(num, nums, pre_fix='', suf_fix=''):
'''
auxiliary function, print work progress
:param num:
:param nums:
:param pre_fix:
:param suf_fix:
:return:
'''
rate = num / nums
ratenum = round(rate, 3) * 100
bar = '\r%s %g/%g [%s%s]%.1f%% %s' % \
(pre_fix, num, nums, '#' * (int(ratenum) // 5), '_' * (20 - (int(ratenum) // 5)), ratenum, suf_fix)
sys.stdout.write(bar)
sys.stdout.flush()
if __name__ == '__main__':
pass
color_dict = nt_dic()
gray_color(color_dict)
# color_gray(color_dict)

















 3442
3442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









