







总结
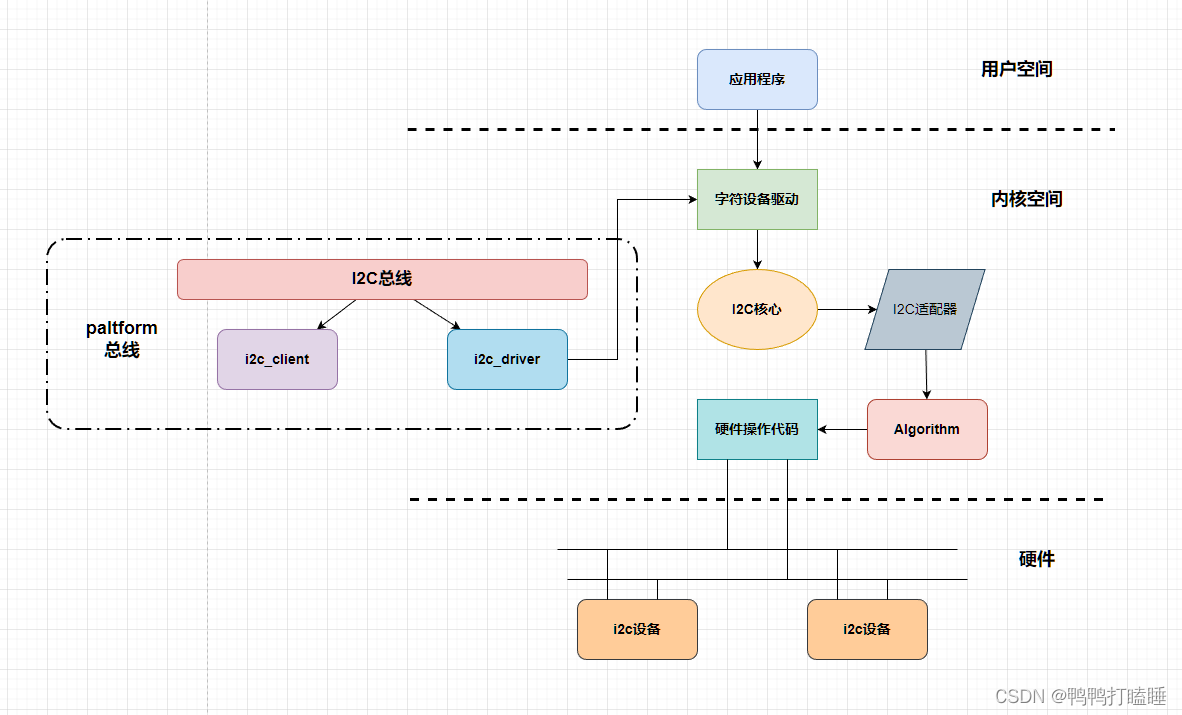
iic_client和iic_driver 加入iic总线的思想和paltform总线的玩法一样
把iic设备和驱动注册到iic总线中 构造出字符设备驱动和设备节点供app进行操作
但是iic硬件设备是挂在iic控制器下面的 所以iic控制器也会有自己的驱动和设备树节点 厂家一般都会帮做好
我们写的iic_driver驱动程序 控制iic硬件的时候 直接使用iic总线提供的api 来控制iic适配器驱动程序 从而控制硬件设备
详细介绍分两部分 一个是iic设备驱动程序 一个是iic控制器驱动介绍
iic控制器驱动
芯片的iic控制器抽象成 一个iic_adapter (一般这个控制器的驱动和设备节点芯片厂商都帮创建好了)
iic_algotithm 也构建好了
linux 上电注册iic总线 drivers/i2c/i2c-core-base.c
static int __init i2c_init(void)
bus_register(&i2c_bus_type); //很熟悉的总线注册
IIC总线匹配规则 也就是看总线上的.match函数
- of_driver_match_device:设备树匹配方式
- 比较 I2C 设备节点的 compatible 属性和 of_device_id 中的 compatible 属性
- acpi_driver_match_device : ACPI 匹配方式
- i2c_match_id:i2c总线传统匹配方式
- 比较 I2C设备名字和 i2c驱动的id_table->name 字段是否相等
构造iic_适配器设备树节点
下面用IIC1控制器来举例子
i2c1: i2c@21a0000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,imx6ul-i2c", "fsl,imx21-i2c";
reg = <0x21a0000 0x4000>; //reg属性记录了IIC寄存器组的地址
interrupts = <GIC_SPI 36 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_I2C1>;
status = "disabled";
};
适配器的驱动与之匹配
这个就是厂商写的适配器驱动 但只是在和设备树匹配后在
/sys/bus/platform/i2c/dev/目录 (这个目录还没查没有板子) 增加新的dev
plantform_driver.probe
struct resource *res;
void __iomem *base;
of_device_id *of_id = of_match_device(i2c_imx_dt_ids,&pdev->dev);
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);//获取resource资源,放到设备树就是reg = <0x21a0000 0x4000>;
base = devm_ioremap_resource(&pdev->dev, res);//对resource物理地址和虚拟地址映射,此时base记录了虚拟地址
phy_addr = (dma_addr_t)res->start;//这里记录物理地址,直接从resource->start拿取
i2c_imx = devm_kzalloc(&pdev->dev, sizeof(*i2c_imx), GFP_KERNEL);//分配内存
i2c_imx->adapter.algo = &i2c_imx_algo;//初始化运算器,用于直接操作硬件的代码
ret = i2c_add_numbered_adapter(&i2c_imx->adapter);//在linux注册一个i2c_adap
static const struct i2c_algorithm i2c_imx_algo = { //运算器结构体
.master_xfer = i2c_imx_xfer,//产生IIC通讯时序,负责数据收发
.functionality = i2c_imx_func,//查询iic通信协议类型,iic通讯协议有一大类
};
.master_xfer
result = i2c_imx_start(i2c_imx);//发送IIC的启动信号
...
for (i = 0; i < num; i++) { //在for循环里面发送数据
if (i == num - 1)
is_lastmsg = true;
result = i2c_imx_bus_busy(i2c_imx, 1);//判断当前iic总线是否忙
if (msgs[i].flags & I2C_M_RD) //不忙判断当前信息需要读还是写
result = i2c_imx_read(i2c_imx, &msgs[i], is_lastmsg);//这里真正控制IIC的寄存器进行发送读取
else {
if (i2c_imx->dma && msgs[i].len >= DMA_THRESHOLD)
result = i2c_imx_dma_write(i2c_imx, &msgs[i]);
else
result = i2c_imx_write(i2c_imx, &msgs[i]);
}
IIC核心函数和万能驱动!!! i2c-dev.c
iic适配器 在上面probe后 iic_bus里面的dev有了新的适配器dev
万能驱动通过bus找到所有适配器dev 给这些适配注册字符设备 /proc/devcies
注册class 和device 再分配设备节点 /dev/xxx
具体如下
- 给每个i2c适配器生成设备文件,给app操作!!!
- 内核集成i2c_dev驱动模块,开机自动加载
- 为每个i2c_adapter生成一个设备文件,在用户空间通过该设备文件间接使用IIC核心函数收发数据
- 因为和适配器的驱动加载有先后问题
这个驱动注册i2c总线的通知函数,解决加载顺序问题
对于这个iic万能驱动程序的存在 我的理解是
iic适配器创建出来,但是没有设备节点 为了让iic适配器直接被应用程序调用 所以使用了i2c-dev.c
给每个i2c适配器生成设备文件,给app操作
看看到底干了点什么把
i2c_dev_init()
res = register_chrdev(I2C_MAJOR, "i2c", &i2cdev_fops);
struct char_device_struct *cd; //构建字符设备结构体
struct cdev *cdev;
__register_chrdev(major, 0, 256, name, fops);
__register_chrdev_region(major, baseminor, count, name);
cdev = cdev_alloc(); //构建cdev
cdev->owner = fops->owner;
cdev->ops = fops;
kobject_set_name(&cdev->kobj, "%s", name); //这里看cdev继承kobj,并且给kobj名字,创建设备文件
cdev_add()
//kobj_map结构体!!是用来管理设备号及其对应的设备的,kobj_map函数把指定的设备号加入到该数组
用kobject对象,得到包含它的对象如cdev
kobj_map(cdev_map, dev, count, NULL,exact_match, exact_lock, p);
kobject_get(p->kobj.parent);
从上面看 没有注册设备节点 只是创建了/proc
i2c_dev_class = class_create(THIS_MODULE, "i2c-dev");
bus_register_notifier(&i2c_bus_type, &i2cdev_notifier);
i2c_for_each_dev(NULL, i2cdev_attach_adapter); //i2cdev_attach_adapter 添加iic适配器就会执行的函数
res = bus_for_each_dev(&i2c_bus_type, NULL, data, fn); //从bus下面的链表的devices找bus_type=i2c_bus_type的 dev
//看看增加了iic适配器就会执行的函数
这里不知道从哪来的 device *dev 很可疑
i2cdev_attach_adapter(struct device *dev, void *dummy)
struct i2c_adapter *adap;
struct i2c_dev *i2c_dev;
if (dev->type != &i2c_adapter_type) //如果不是iic适配器返回0
return 0;
adap = to_i2c_adapter(dev);//从dev上面获取iic适配器
i2c_dev = get_free_i2c_dev(adap); //给i2c_dev分配内存
cdev_init(&i2c_dev->cdev, &i2cdev_fops);//把这个file_operation操作接口,记录在i2c_dev->cdev
res = cdev_add(&i2c_dev->cdev, MKDEV(I2C_MAJOR, adap->nr), 1); //给这个设备指定设备号,之前分配的没有用,现在才开始用
主设备没变,次设备号变成了适配器的编号,构造出/proc/device/xxx设备
i2c_dev->dev = device_create(i2c_dev_class, &adap->dev,MKDEV(I2C_MAJOR, adap->nr), NULL,"i2c-%d", adap->nr);//在i2c_dev_class创建新的目录
//新目录下xxx/i2c-%d/dev同时记录属性文件 新目录名i2c-%d
//有了属性文件,获取设备号,和file_operation
//接着kset用kobj_uvevnt()通知用户空间创建设备节点
iic设备驱动程序
设备树构造dev
设备dev转化为dev节点 在iic中转化为iic_client结构体
struct i2c_client
struct device dev; 继承了 struct device 符合linux驱动设备模型
linux根据IIC设备节点自动生成i2c_client节点
//iomuxc子节点
pinctrl_i2c1: i2c1grp {
fsl,pins = <
MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x4001b8b0
MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x4001b8b0
>;
};
//在i2c控制器下新增 设备节点
&i2c1{
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
status = "okay";
i2c_mpu6050@68 {
compatible = "fire,i2c_mpu6050";
reg = <0x68>;
status = "okay";
};
};
```c
struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* 7位地址 */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct device dev; /* 继承了 struct device 符合linux驱动设备模型 */
int init_irq; /* irq set at initialization */
int irq; /* irq issued by device */
struct list_head detected;
#if IS_ENABLED(CONFIG_I2C_SLAVE)
i2c_slave_cb_t slave_cb; /* callback for slave mode */
#endif
};
设备驱动
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/i2c.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <asm/mach/map.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/io.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include "i2c_mpu6050.h"
/*------------------字符设备内容----------------------*/
#define DEV_NAME "I2C1_mpu6050"
#define DEV_CNT (1)
/*定义 led 资源结构体,保存获取得到的节点信息以及转换后的虚拟寄存器地址*/
static dev_t mpu6050_devno; //定义字符设备的设备号
static struct cdev mpu6050_chr_dev; //定义字符设备结构体chr_dev
struct class *class_mpu6050; //保存创建的类
struct device *device_mpu6050; // 保存创建的设备
struct device_node *mpu6050_device_node; //rgb_led的设备树节点结构体
/*------------------IIC设备内容----------------------*/
struct i2c_client *mpu6050_client = NULL; //保存mpu6050设备对应的i2c_client结构体,匹配成功后由.prob函数带回。
/*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 数据要写入的地址,
*data, 要写入的数据
*返回值,错误,-1。成功,0
*/
static int i2c_write_mpu6050(struct i2c_client *mpu6050_client, u8 address, u8 data)
{
int error = 0;
u8 write_data[2];
struct i2c_msg send_msg; //要发送的数据结构体
/*设置要发送的数据*/
write_data[0] = address;
write_data[1] = data;
/*发送 iic要写入的地址 reg*/
send_msg.addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
send_msg.flags = 0; //标记为发送数据
send_msg.buf = write_data; //写入的首地址
send_msg.len = 2; //reg长度
/*执行发送*/
error = i2c_transfer(mpu6050_client->adapter, &send_msg, 1);
if (error != 1)
{
printk(KERN_DEBUG "\n i2c_transfer error \n");
return -1;
}
return 0;
}
/*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 要读取的地址,
*data,保存读取得到的数据
*length,读长度
*返回值,错误,-1。成功,0
*/
static int i2c_read_mpu6050(struct i2c_client *mpu6050_client, u8 address, void *data, u32 length)
{
int error = 0;
u8 address_data = address;
struct i2c_msg mpu6050_msg[2];
/*设置读取位置msg*/
mpu6050_msg[0].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
mpu6050_msg[0].flags = 0; //标记为发送数据
mpu6050_msg[0].buf = &address_data; //写入的首地址
mpu6050_msg[0].len = 1; //写入长度
/*设置读取位置msg*/
mpu6050_msg[1].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
mpu6050_msg[1].flags = I2C_M_RD; //标记为读取数据
mpu6050_msg[1].buf = data; //读取得到的数据保存位置
mpu6050_msg[1].len = length; //读取长度
error = i2c_transfer(mpu6050_client->adapter, mpu6050_msg, 2);
if (error != 2)
{
printk(KERN_DEBUG "\n i2c_read_mpu6050 error \n");
return -1;
}
return 0;
}
/*初始化i2c
*返回值,成功,返回0。失败,返回 -1
*/
static int mpu6050_init(void)
{
int error = 0;
/*配置mpu6050*/
error += i2c_write_mpu6050(mpu6050_client, PWR_MGMT_1, 0X00);
error += i2c_write_mpu6050(mpu6050_client, SMPLRT_DIV, 0X07);
error += i2c_write_mpu6050(mpu6050_client, CONFIG, 0X06);
error += i2c_write_mpu6050(mpu6050_client, ACCEL_CONFIG, 0X01);
if (error < 0)
{
/*初始化错误*/
printk(KERN_DEBUG "\n mpu6050_init error \n");
return -1;
}
return 0;
}
/*字符设备操作函数集,open函数实现*/
static int mpu6050_open(struct inode *inode, struct file *filp)
{
// printk("\n mpu6050_open \n");
/*向 mpu6050 发送配置数据,让mpu6050处于正常工作状态*/
mpu6050_init();
return 0;
}
/*字符设备操作函数集,.read函数实现*/
static ssize_t mpu6050_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
char data_H;
char data_L;
int error;
short mpu6050_result[6]; //保存mpu6050转换得到的原始数据
// printk("\n mpu6050_read \n");
i2c_read_mpu6050(mpu6050_client, ACCEL_XOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_XOUT_L, &data_L, 1);
mpu6050_result[0] = data_H << 8;
mpu6050_result[0] += data_L;
i2c_read_mpu6050(mpu6050_client, ACCEL_YOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_YOUT_L, &data_L, 1);
mpu6050_result[1] = data_H << 8;
mpu6050_result[1] += data_L;
i2c_read_mpu6050(mpu6050_client, ACCEL_ZOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_ZOUT_L, &data_L, 1);
mpu6050_result[2] = data_H << 8;
mpu6050_result[2] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_XOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_XOUT_L, &data_L, 1);
mpu6050_result[3] = data_H << 8;
mpu6050_result[3] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_YOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_YOUT_L, &data_L, 1);
mpu6050_result[4] = data_H << 8;
mpu6050_result[4] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_ZOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_ZOUT_L, &data_L, 1);
mpu6050_result[5] = data_H << 8;
mpu6050_result[5] += data_L;
// printk("AX=%d, AY=%d, AZ=%d \n",(int)mpu6050_result[0],(int)mpu6050_result[1],(int)mpu6050_result[2]);
// printk("GX=%d, GY=%d, GZ=%d \n \n",(int)mpu6050_result[3],(int)mpu6050_result[4],(int)mpu6050_result[5]);
/*将读取得到的数据拷贝到用户空间*/
error = copy_to_user(buf, mpu6050_result, cnt);
if(error != 0)
{
printk("copy_to_user error!");
return -1;
}
return 0;
}
/*字符设备操作函数集,.release函数实现*/
static int mpu6050_release(struct inode *inode, struct file *filp)
{
// printk("\n mpu6050_release \n");
/*向mpu6050发送命令,使mpu6050进入关机状态*/
return 0;
}
/*字符设备操作函数集*/
static struct file_operations mpu6050_chr_dev_fops =
{
.owner = THIS_MODULE,
.open = mpu6050_open,
.read = mpu6050_read,
.release = mpu6050_release,
};
/*----------------平台驱动函数集-----------------*/
static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = -1; //保存错误状态码
printk(KERN_EMERG "\t match successed \n");
/*---------------------注册 字符设备部分-----------------*/
//采用动态分配的方式,获取设备编号,次设备号为0,
//设备名称为rgb-leds,可通过命令cat /proc/devices查看
//DEV_CNT为1,当前只申请一个设备编号
ret = alloc_chrdev_region(&mpu6050_devno, 0, DEV_CNT, DEV_NAME);
if (ret < 0)
{
printk("fail to alloc mpu6050_devno\n");
goto alloc_err;
}
//关联字符设备结构体cdev与文件操作结构体file_operations
mpu6050_chr_dev.owner = THIS_MODULE;
cdev_init(&mpu6050_chr_dev, &mpu6050_chr_dev_fops);
// 添加设备至cdev_map散列表中
ret = cdev_add(&mpu6050_chr_dev, mpu6050_devno, DEV_CNT);
if (ret < 0)
{
printk("fail to add cdev\n");
goto add_err;
}
/*创建类 */
class_mpu6050 = class_create(THIS_MODULE, DEV_NAME);
/*创建设备 DEV_NAME 指定设备名,*/
device_mpu6050 = device_create(class_mpu6050, NULL, mpu6050_devno, NULL, DEV_NAME);
mpu6050_client = client;
return 0;
add_err:
// 添加设备失败时,需要注销设备号
unregister_chrdev_region(mpu6050_devno, DEV_CNT);
printk("\n error! \n");
alloc_err:
return -1;
}
static int mpu6050_remove(struct i2c_client *client)
{
/*删除设备*/
device_destroy(class_mpu6050, mpu6050_devno); //清除设备
class_destroy(class_mpu6050); //清除类
cdev_del(&mpu6050_chr_dev); //清除设备号
unregister_chrdev_region(mpu6050_devno, DEV_CNT); //取消注册字符设备
return 0;
}
/*定义ID 匹配表*/
static const struct i2c_device_id gtp_device_id[] = {
{"fire,i2c_mpu6050", 0},
{}};
/*定义设备树匹配表*/
static const struct of_device_id mpu6050_of_match_table[] = {
{.compatible = "fire,i2c_mpu6050"},
{/* sentinel */}};
/*定义i2c总线设备结构体*/
struct i2c_driver mpu6050_driver = {
.probe = mpu6050_probe,
.remove = mpu6050_remove,
.id_table = gtp_device_id,
.driver = {
.name = "fire,i2c_mpu6050",
.owner = THIS_MODULE,
.of_match_table = mpu6050_of_match_table,
},
};
/*
*驱动初始化函数
*/
static int __init mpu6050_driver_init(void)
{
int ret;
pr_info("mpu6050_driver_init\n");
ret = i2c_add_driver(&mpu6050_driver);
return ret;
}
/*
*驱动注销函数
*/
static void __exit mpu6050_driver_exit(void)
{
pr_info("mpu6050_driver_exit\n");
i2c_del_driver(&mpu6050_driver);
}
module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);
MODULE_LICENSE("GPL");
















 2015
2015











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









