







1.安装海康工业相机套件MVS,需要下载的MVS如下图所示。链接为https://www.hikrobotics.com/cn/machinevision/service/download?module=0
2.在VS中添加头文件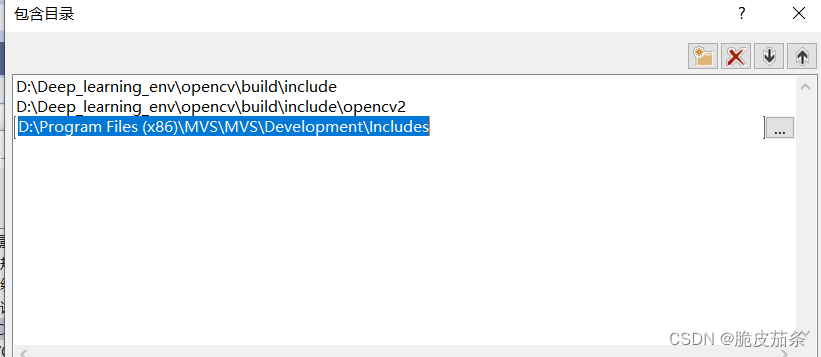
3.在VS中添加库目录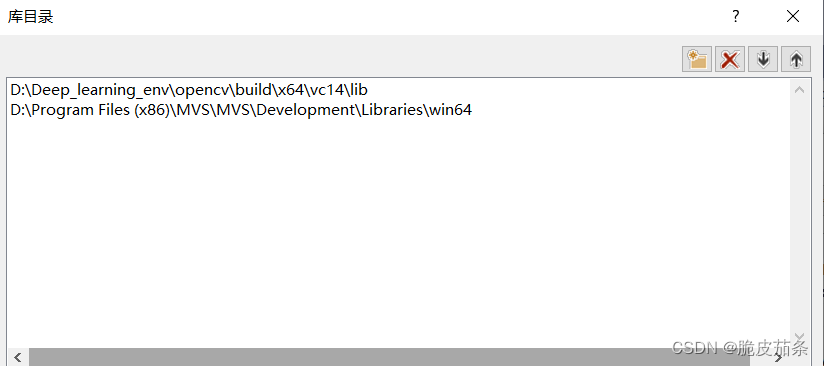
4.在VS中添加依赖项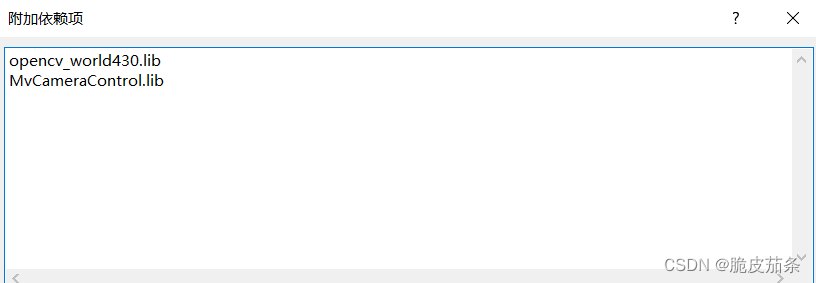
5.代码如下
#include <stdio.h>
#include <conio.h>
#include <iostream>
#include <string>
#include "MvCameraControl.h"
#include "opencv2/opencv.hpp"
bool printDeviceInfo(MV_CC_DEVICE_INFO* hk_device);
bool hk2cv(MV_FRAME_OUT_INFO_EX* hk_imginfo, unsigned char* data, cv::Mat& src_img);
using namespace std;
int main(int argv, char** argc) {
//1.获取SDK版本信息
unsigned int sdk_V = MV_CC_GetSDKVersion();
printf("SDK version is [0x%x]\n", sdk_V);
//2.查找目标设备
int ret = MV_OK;
void* handle = NULL;
MV_CC_DEVICE_INFO_LIST hk_devices;
memset(&hk_devices, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
ret = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &hk_devices);
if (ret != MV_OK) {
std::cout << "enum devices faild!" << std::endl;
return -1;
}
std::cout << "共检测到相机的个数为:" << hk_devices.nDeviceNum << std::endl;
//3.判断设备是否可访问
if (hk_devices.nDeviceNum > 0)
{
for (unsigned int i = 0; i < hk_devices.nDeviceNum; i++)
{
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = hk_devices.pDeviceInfo[i];
bool access = MV_CC_IsDeviceAccessible(pDeviceInfo, 1);
if (!access){
printf("[device %d]:could not access... nRet:[0x%x]\n", i, ret);
}
else {
printf("[device %d]:is OK... nRet:[0x%x]\n", i, ret);
}
}
}
else
{
printf("Find No Devices!\n");
return -1;
}
if (hk_devices.nDeviceNum > 0) {
MV_CC_DEVICE_INFO* hk_camera = hk_devices.pDeviceInfo[0];
if (printDeviceInfo(hk_camera) == false) {
return -1;
}
}
else {
std::cout << "no device found" << std::endl;
return -1;
}
//4.创建相机句柄
ret = MV_CC_CreateHandle(&handle, hk_devices.pDeviceInfo[0]);
if (ret != MV_OK) {
return -1;
}
//5.打开设备
ret = MV_CC_OpenDevice(handle);
if (ret != MV_OK) {
cout << "设备未打开" << endl;
return -1;
}
else {
std::cout << "设备已经打开" << std::endl;
}
//6.设置触发模式为off
ret = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (ret != MV_OK) {
return -1;
}
//7.获取数据包的大小
MVCC_INTVALUE hk_param;
memset(&hk_param, 0, sizeof(MVCC_INTVALUE));
ret = MV_CC_GetIntValue(handle, "PayloadSize", &hk_param);
if (ret != MV_OK) {
return -1;
}
unsigned int payload_size = hk_param.nCurValue;
// load config
//ret = MV_CC_FeatureLoad(handle, "FeatureFile.ini");
//if (ret != MV_OK) {
// cout << "loading config file faild" << endl;
// return -1;
//}
// save config
//ret = MV_CC_FeatureSave(handle, "FeatureFile.ini");
//if (ret != MV_OK) {
// return -1;
//}
//8.开始截流
ret = MV_CC_StartGrabbing(handle);
if (ret != MV_OK) {
cout << "grab image failed!" << endl;
return -1;
}
MV_FRAME_OUT_INFO_EX hk_imginfo;
memset(&hk_imginfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
unsigned char* data = (unsigned char*)malloc(sizeof(unsigned char) * (payload_size));
if (data == NULL) {
return -1;
}
cv::Mat src_img;
while (!(_kbhit() && _getch() == 0x1b)) {
ret = MV_CC_GetOneFrameTimeout(handle, data, payload_size, &hk_imginfo, 1000);
if (ret != MV_OK) {
free(data);
data = NULL;
return -1;
}
if (hk2cv(&hk_imginfo, data, src_img) == false) {
continue;
}
cv::imshow("test", src_img);
cv::waitKey(30);
}
//9.停止截流
ret = MV_CC_StopGrabbing(handle);
if (ret != MV_OK) {
return -1;
}
//10.关闭设备
ret = MV_CC_CloseDevice(handle);
if (ret != MV_OK) {
return -1;
}
//11.销毁相机句柄
ret = MV_CC_DestroyHandle(handle);
if (ret != MV_OK) {
return -1;
}
system("pause");
return 0;
}
bool printDeviceInfo(MV_CC_DEVICE_INFO* hk_device) {
if (NULL == hk_device)
{
printf("The Pointer of hk_device is NULL!\n");
return false;
}
if (hk_device->nTLayerType == MV_GIGE_DEVICE)
{
int nIp1 = ((hk_device->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
int nIp2 = ((hk_device->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
int nIp3 = ((hk_device->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
int nIp4 = (hk_device->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
// print current ip and user defined name
printf("CurrentIp: %d.%d.%d.%d\n", nIp1, nIp2, nIp3, nIp4);
printf("UserDefinedName: %s\n\n", hk_device->SpecialInfo.stGigEInfo.chUserDefinedName);
}
else if (hk_device->nTLayerType == MV_USB_DEVICE)
{
printf("UserDefinedName: %s\n", hk_device->SpecialInfo.stUsb3VInfo.chUserDefinedName);
printf("Serial Number: %s\n", hk_device->SpecialInfo.stUsb3VInfo.chSerialNumber);
printf("Device Number: %d\n\n", hk_device->SpecialInfo.stUsb3VInfo.nDeviceNumber);
}
else
{
printf("Not support.\n");
}
return true;
}
bool hk2cv(MV_FRAME_OUT_INFO_EX* hk_imginfo, unsigned char* data, cv::Mat& src_img) {
cv::Mat cv_img;
if (hk_imginfo->enPixelType == PixelType_Gvsp_Mono8) {
cv_img = cv::Mat(hk_imginfo->nHeight, hk_imginfo->nWidth, CV_8UC1, data);
}
else if (hk_imginfo->enPixelType == PixelType_Gvsp_RGB8_Packed) {
for (unsigned int j = 0; j < hk_imginfo->nHeight; j++) {
for (unsigned int i = 0; i < hk_imginfo->nWidth; i++) {
unsigned char red = data[j * (hk_imginfo->nWidth * 3) + i * 3];
data[j * (hk_imginfo->nWidth * 3) + i * 3] = data[j * (hk_imginfo->nWidth * 3) + i * 3 + 2];
data[j * (hk_imginfo->nWidth * 3) + i * 3 + 2] = red;
}
}
cv_img = cv::Mat(hk_imginfo->nHeight, hk_imginfo->nWidth, CV_8UC3, data);
}
else {
printf("unsupported pixel format\n");
return false;
}
if (cv_img.data == NULL) {
return false;
}
cv_img.copyTo(src_img);
return true;
}

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









