







背景和定义
目前常用的pnp方法有很多,但是本人学习和查阅后发现比较零散,因此,在这里将所学习的方法按照理解分类和总结,并且着重提出实现过程中或者原理上需要注意的点。PnP是Perspective-n-Point的缩写,指在已知相机内参数的前提下,利用某角度下n个三维点与它们对应的图像点坐标,估算出此时拍摄位置的信息。
方法分类
PnP是一类3D-2D对应关系的问题,相似的还有2D-2D,3D-3D关系。
2D-2D关系比如两个视角下拍摄平面物体,根据两幅图像平面上的若干个对应的特征点估算出单应性变换关系;比如对极几何中,左、右相机视图中的点满足极线约束的关系,左图上的一点,利用基础矩阵能够计算出右图的匹配点所在的直线。
3D-3D关系是以三维空间中的坐标系变换为主,在点云拼接中会遇到,比如ICP等。
本文的3D-2D关系,根据背景中提及的,主要用于确定某的图像拍摄的角度,在定位中会经常遇到。
根据PnP原理的不同,按照我个人的理解,将这些方法分为两个大类:
Ⅰ类:通过3D-2D的投影矩阵,直接求解投影方程中的未知数,也就是位姿参数的矩阵
Ⅱ类:通过解算出3D点在相机坐标系下的坐标,结合3D点在世界坐标系的坐标,解算出坐标系转换关系,也就是位姿参数的矩阵
典型方法
P3P(角锥法)
P3P指利用3对3D-2D点来估计相机位姿,解决思路属于第Ⅱ类方法。整体思路为:已知物体点ABC在世界坐标系的坐标,通过他们在图像上的投影点abc,以及光心O构成的三角锥的几何关系,来得到ABC在相机坐标系下的坐标,由此计算出位姿转换矩阵。具体是:
- 已知a,b,c的图像坐标,计算ab, bc, ac的长度,因为相机的内参是已知的,那么图像点a,b,c在相机坐标系O下的坐标就能得到,由此得到oa, ob,oc的长度,在三角形oab,oac,obc中余弦定理计算∠aoc, ∠aob, ∠boc


- 在三角形AOB,AOC,BOC中,同样地能够写出余弦定理表达式,
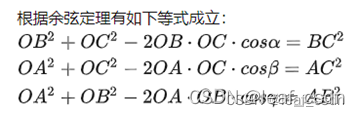 方程组中,未知数为OA,OB,OC。这是已知AB、BC、AC长度和三个夹角,计算OA、OB、OC的长度的问题,进一步的吴消元法得到一元四次方程,最终得到4组解析解(详细过程可参见其他博客)。因此,需要第4个点对来验证合适解。解算出这三个量的长度后,又知道oa,ob,oc向量的方向,那么就能得到A,B,C在相机坐标下的坐标.
方程组中,未知数为OA,OB,OC。这是已知AB、BC、AC长度和三个夹角,计算OA、OB、OC的长度的问题,进一步的吴消元法得到一元四次方程,最终得到4组解析解(详细过程可参见其他博客)。因此,需要第4个点对来验证合适解。解算出这三个量的长度后,又知道oa,ob,oc向量的方向,那么就能得到A,B,C在相机坐标下的坐标. - 由ABC在相机坐标系和世界坐标系的坐标,计算转换矩阵(可参考点云对齐)
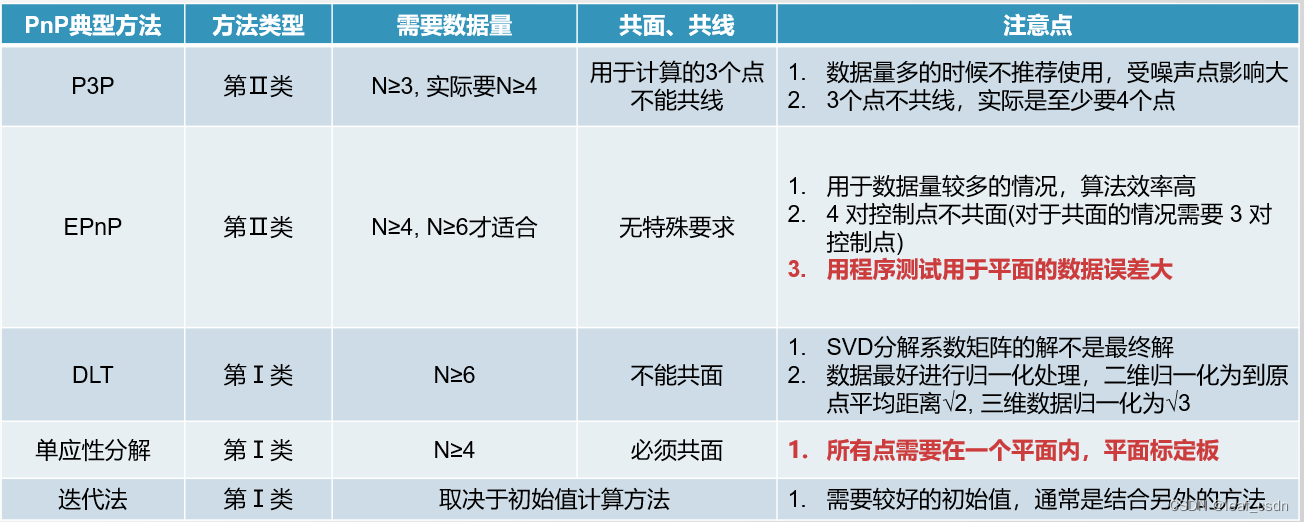
小结:P3P应用时需注意:3个点不共线,实际是要N≥4。
DLT
DLT(direct linear transform)属于第Ⅰ类方法。整体思路为:
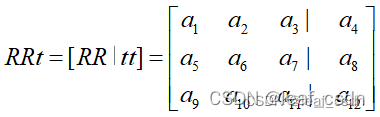
- 根据投影矩阵化简得到关于外参矩阵的两个方程,投影矩阵为
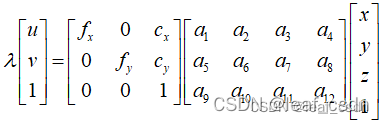
将矩阵展开,并进一步约去第三项
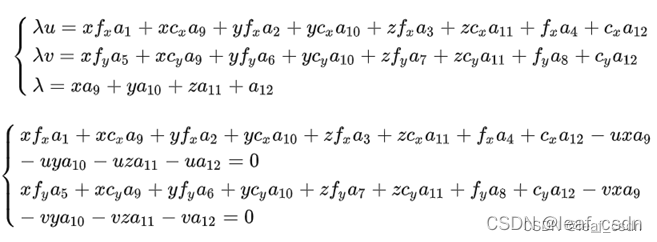
方程组中未知数为 a 1 , a 2 , a 3 . . . a 12 a_1,a_2,a_3...a_{12} a1,a2,a3...a12共12个,由此可见,一对3D-2D点能够建立两个等式,那么至少需要6对这样的点才能解算出12个未知数。 - 将上面的等式写为矩阵形式,根据至少6对数据,构造“AX=0”形式的方程组,SVD(A)或SVD(ATA)=UWV^T来解算RT矩阵中的12个参数(具体可参见OpenCV内部函数cvFindExtrinsicCameraParams2解析(二))。由式子可以看出,系数矩阵中假如z=0,将会有3列系数都为0,该系数矩阵将不是满秩的矩阵,结果会不稳定,因此,数据不能共面;其次,系数矩阵中的数据来自于世界坐标和像平面坐标,但数据值差异很大时会导致矩阵内的元素差异很大,导致求解出问题,因此通常需要数据归一化处理,可参见多视图几何。

- SVD解算V的最后一列向量得到RT参数没有尺度信息,需要进一步的处理才能得到满足单位正交特性的旋转矩阵
为了得到正解matR, 可以认为是寻找近似解

最优解为

那么尺度和平移量分别为

小结:DLT应用时需注意:所有点不能共面,N≥6,要做数据归一化;SVD的结果还需要进一步分解才能估算得到最终的位姿矩阵
单应性矩阵分解
前面说PnP是3D-2D的问题,若3D点共面,将变为2D-2D问题,可以通过平面的单应性性质来估算位姿参数,重点是单应性矩阵如何分解为R,T。具体可参见另一篇博客Opencv外参估计cvFindExtrinsicCameraParams2原理解析(三),该方法属于第Ⅰ类方法。
- 两个平面上具有的2D-2D对应点,满足平面单应性关系,单应性矩阵有8个自由度,一对2D-2D点能构成两个方程组,至少需要4对点解算出单应性矩阵。

- 参考张正友的文献,假设世界坐标系在平面上,Z轴垂直于平面,那么平面上点的Z=0。根据投影方程表达为(ORB-SLAM中有Faugeras 的单应性矩阵分解方法, opencv也有实现函数,还未研究)
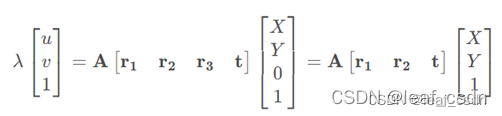 投影方程的输入和输出都是二维点,那么求解的单应性矩阵满足
投影方程的输入和输出都是二维点,那么求解的单应性矩阵满足

- 为了满足旋转矩阵列是单位向量性质,根据单应性矩阵的向量做单位化得到r1和r2向量

- 为了满足旋转矩阵正交性质,r1和r2叉乘得到r3向量
- 单应性矩阵与外参矩阵存在的系数关系,该系数折中的取

- 平移向量为
小结:应用时需注意:所有点需要共面,N≥4,重点是如何由单应性分解出旋转和平移量
迭代法
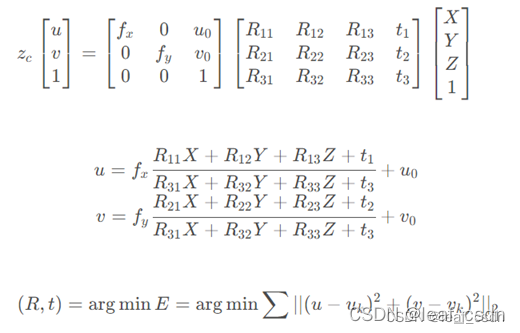
迭代法实现的思路与opencv标定时,对外参数进行初始值估计时使用的迭代法相同,重点在于求解6个外参数的偏导数,具体可参见我的博客外参数求偏导。该方法属于第Ⅰ类方法。
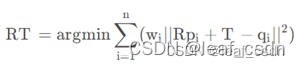
根据投影矩阵,建立投影点与真实点的残差,以最小化投影残差为目标,优化计算RT
小结:应用时需注意:需要较好的初始值,通常会在之前方法的基础上应用迭代法,所以N取决于初始值的方法
EPnP
E是efficient的缩写,高效性主要体现在第4步所阐述。该方法属于第Ⅱ类方法。整体思路为:
-
由世界坐标系的3D点得到四个控制点Cj(一个质心,三个主方向上的点),控制点建立质心坐标系,其他的点都能用该四个点加权表示。一个重要的结论是:无论在世界坐标系,还是相机坐标系,权重系数是不变的。那么只要能够求解出在相机坐标下这4个控制点的坐标,带入相同的权重系数,就能计算任意点在相机坐标系的位置,从而转换为3D-3D坐标系变换问题。

-
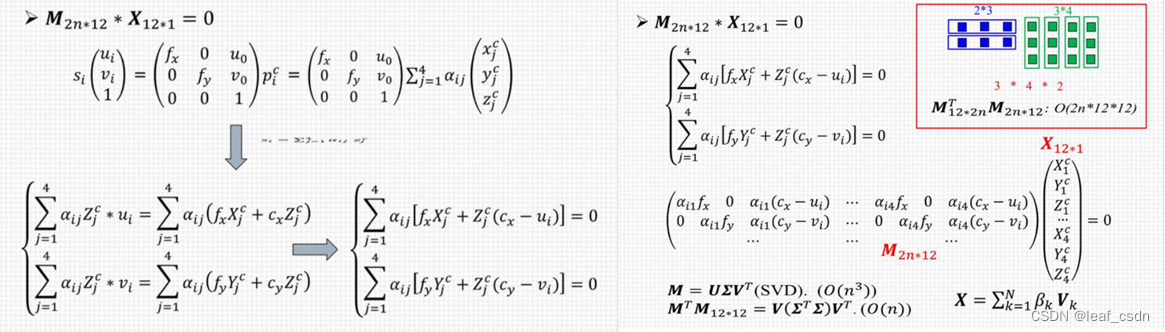
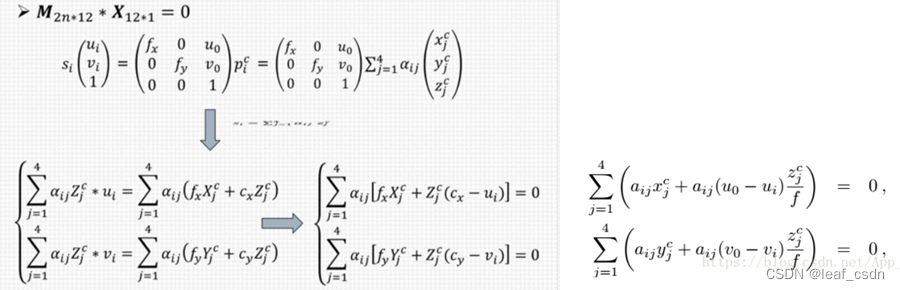
为了求解这4个点的相机坐标系的位置,如下左图根据投影矩阵展开得到两个等式:已知数是内参数和权重系数,未知数是四个控制点的三维坐标(共12个未知数),因此至少要6对点来进行求解。
-
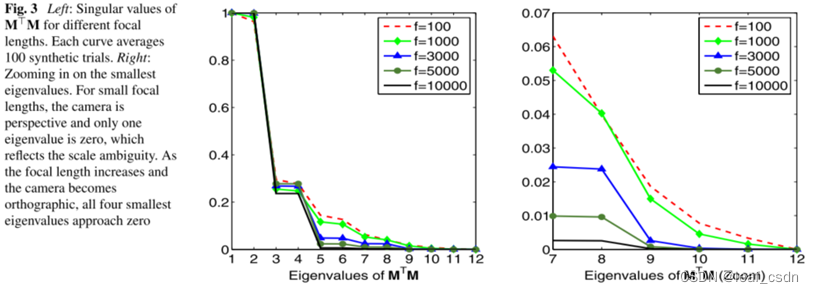
对于上面形如AX=0的解,SVD分解A系数矩阵,V的最后一列是特征值最小的零空间向量,也就是方程的解。我们知道对于12个未知数的方程组,至少要6对点来能求解,原文之所以N在4到6也可以计算,个人认为是包含了一个隐含条件,那就是焦距足够大,下图是原文在随着焦距增大时,SVD最小的4个特征值是接近0的,因此能够用V最后1~4列的向量来加权表示AX=0的解。
-
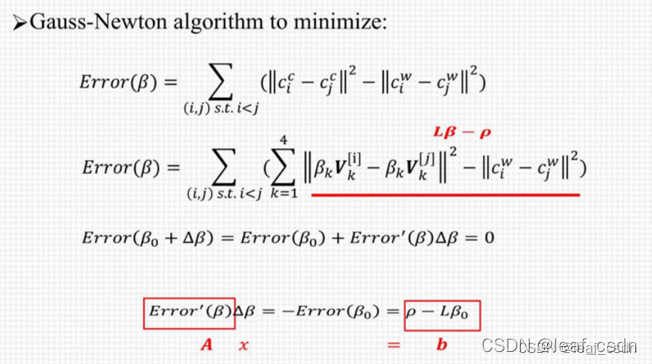
进一步用高斯牛顿迭代,对上述中“用V最后1~4列的向量来加权表示AX=0的解”中的权重计算最优解,细化求解相机坐标系下的控制点坐标。这里,EPNP的高效主要是算法复杂度为O(n),并且高斯牛顿迭代过程相对于传统的迭代法来说参数更少,至多4个权重系数,而迭代法为6个外参数,收敛更快。这也就是我对高效性的理解。
-
由Pi在相机坐标系和世界坐标系的坐标,计算转换矩阵。
小结:应用时需注意: N≥4,但实际应用N≥6才算稳定
其他延伸
**延申1:**在未知相机内参数的情况下,诸多方法也能适用,但解算的稳定性不同,如UPnP(Uncalibrated PnP),求解过程与EPnP相似,只是在求解控制点在相机坐标系的坐标时,建立方程组将焦距也作为未知数
**延申2:**通常内参和外参都未知时,根据3D-2D点得到了内参外参组合的摄像机矩阵,需要进一步分解内参矩阵和外参矩阵,这里需要利用内参矩阵的上三角特点,利用RQ分解来得到内参K,外参R和t摄像机矩阵的分解
总结
最后是对上面所有提及方法的一个总结,通常使用平面标定板在进行相机标定时,会使用到单应性分解+迭代法的组合,我这里测试EPNP时发现在平面数据上结果偏差还是比较大的,后续有分析结果再更新。
















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











