



文章目录
手把手教你完成Faster-RCNN训练
该项目是fork了B站大佬bubbliiiing的,为了学习双阶段目标检测,有一部分注释也是自己重写了。但尊重原著,有需要的可以看原代码链接。
该帖子github链接: https://github.com/luohaohaoluo/zeroDL/tree/main/demo/faster-rcnn,感兴趣的朋友可以自行下载训练。
1. 文件目录介绍
-- \faset-rcnn
-- \networks
-- \model_data
-- resnet50.py
-- rpn.py
-- frcnn.py
-- frcnn_training.py
-- classifier.py
-- \utils
-- anchors.py
-- utils_bbox.py
-- dataloader.py
-- utills.py
-- utils_map.py
-- utils_fit.py
-- callbacks.py
-- \dataset
-- VOC2007
-- Annotations
-- lmageSets
-- JPEGlmages
-- SegmentationClass
-- SegmentationObject
-- train.py
-- voc_annotation.py
-- get_map.py
-- predicet.py
-- summary.py
-- frcnn.py
- networks: 关于faster-rcnn网络的代码
- model_data: 存放模型权重,例如预训练模型、训练的faster-rcnn。
- resnet50.py: 作为faster-rcnn的backbone,用于特征提取
- rpn.py: RPN网络构建的代码
- classifier.py: 检测头的代码
- frcnn.py: faster-rcnn的整体框架代码
- frcnn_training.py: faster-rcnn训练需要的配置,例如优化器,学习率等
- utils:
- anchors: 基础先验框和每个网络拓展先验框的代码
- utils_bbox: 预测框与先验框融合以及解析的代码
- dataloader.py: 生成一个关于VOC2007的dataloader类,用于训练或验证。
- utilss: 存放一些常用的函数,如随机数种子设置,图像归一化等
- utils_map.py: 计算map的库
- utils_fit.py: 训练时,单个epoch的过程
- callbacks.py: 训练过程,记录数据
- dataset:存放了VOC2007数据集,其中:
- Annotations: ".xml"格式的文件,记录每张图片的大小、物体类别、边界框位置信息等
- lmageSets: 关于数据集划分成train、val、test的".txt"文件
- JPEGlmages: JPEG格式的图片
- SegmentationClass: 以类别为基准的分割图片,可做语义分割
- SegmentationObject: 以物体为基准的分割图片,可做实例分割
- train.py: 利用VOC2007训练faster-rcnn的训练框架
- voc_annotation.py: 将VOC数据集做注释处理,生成的".txt"文件,将带有图像路径,以及真实框和标签信息。
- get_map.py: 计算map
- predicet.py: 模型预测文件
- summary.py: 计算模型的网络结构,包括参数量,以及FLOPS等
- frcnn.py: 模型预测调用的库,主要是方面实现预测的4个功能
2. faster-rcnn网络框架整体介绍


- 步骤:
- 第一步:将整个图片输入到一个基础卷积网络,得到整张图的feature map;
- 第二步:将region proposal(ROI)映射到feature map当中;
- 第三步:ROI提取一个固定长度的特征向量,每个特征会输入到一系列全连接层,得到一个ROI特征向量(该步骤对每一个候选区域都会进行同样的操作);
- 其中一个是传统softmax层进行分类,输出类别有K个类别+“背景”类;
- 另一个是bounding box regressor。
2.1. backbone构建

这里选用的是resnet50的结构, 为了能够顺利加载resnet50网络权重,因此,严格按照pytorch官方给的命名结构来写。

其中注意的是残差块的大小,左图是resnet18/34的残差块,右图是resnet50/101/152的残差块,这里如果当模型需要进行高和宽的压缩的时候,一般右图会有downsample操作。
2.2. RPN构建

这里的RPN其实是建立在原图的基础上,在最后分割头的时候,会根据比例缩放到feature map上,所以为什么就有了大约在600*600的网格点出来。 每个网格点,都会得到9个先验框,组成一共12996个先验框,根据NMS在训练过程中,筛选出600个先验框出来。
这里讲解的文件是rpn.py:
- 1.先在实例化的时候,就初始化9个基础先验框。
- 2.从forwad()开始看,首先是根据backbone的feature map,经过简单的卷积操作,得到两条分支,分别是rpn_locs和rpn_scores,用于记录预测框的位置和对应的得分。与此同时,根据得分,筛选出有物体的预测框出来做准备。值得提及的是根据后来的代码查阅,发现,其实rpn_locs的最后一维4个参数分别代表目标偏移框的( Δ x \Delta x Δx, Δ y \Delta y Δy, Δ W \Delta W ΔW, Δ H \Delta H ΔH),所谓的预测框,其实更像是在先验框的基础上,通过参数化的微调从而实现的。这里可以看出双端目标检测网络,其实是需要先验框的配合,结合预测数值搭配完成预测。
- 3._enumerate_shifted_anchor(np.array(self.anchor_base), self.feat_stride, h, w):将生成的基础先验框根据self.feat_stride参数,进行平移调整,覆盖到每一个网格中心。返回得到一个每个网格点的9个预测框,以这里为例shape就是(12996, 4)
- 4.接下来,需要将先验框们根据batch覆盖在每一张图片里。self.proposal_layer(rpn_locs[i], rpn_fg_scores[i], anchor, img_size, scale=scale) 完成了12996个先验框与预测点的匹配问题,根据NMS算法,以及其nms_iou、xxx_post_nms参数,最后筛选出一系列得分较高的带有预测性质的先验框,此时可以称之为预测框。模式是训练的时候,shape为(600, 4),大大减少了预测框数量。
- 5.最后根据torch.cat操作,将一个batch的预测框都合在一起。返回5个参数
- rpn_locs: 每个样本筛选后的600个预测框
- rpn_scores: 每个预测框对应的得分,或者也叫置信度。
- rois: 存放一个批次的所有筛选后的roi。
- roi_indices: 记录roi属于哪个批次的,同一批次的indice相同。
- anchor: 未筛选前的12996个基础先验框。
2.3. 检测头
因为backbone是resnet50,所以这里是以此为基础的检测头,这里讲解的文件是classifier.py。
步骤:
- 1. 先将batch与每个类别预测框数合并后,展平。然后,将ROIs的高度坐标从图像坐标系转换为特征图坐标系。
- 2. 将indices与rois匹配合并起来,经过ROIPooling,得到shape:(batch * 600, 1024, 14, 14)。
- 3. 利用resnet的第五层conv作为分类提取,将roipooling的输出送入sel.classifier,得到fc7,其shape:(batch * 600, 2048, 1, 1),view后,得到 (batch * 600, 2048)。
- 4. fc7分别送到self.cls_loc和self.score,得到 (batch * 600, n_class*4) 和 (batch * 600, n_class),其中roi_cls_locs相当于对所有的类别都进行了预测框预测,roi_scores记录了每个预测框的得分情况。
- 5. 最后view尺寸,将batch与每个类别预测框数分离,得到最终输出,得到 (batch, 600, n_class*4) 和 (batch, 600, n_class)
可以看到,变量rois与roi_indices并未经过分割头,这也说明了RPN重在与调整锚框,而分割头重在于评价锚框,并根据此返回给RPN。
3. VOC数据集预处理
该预处理文件就是voc_annotation.py,这里的2007_train.txt,2007_val.txt文件里面,不仅有样本对应的文件名,还有类别、bbox标签的信息,后续的训练主要也是使用这个
annotation_mode 具体说明如下:
- annotation_mode == 0: 根据Annotations文件夹以及ImageSets/main里的样本数据生成trainval.txt, train.txt, val.txt, test.txt, 2007_train.txt,2007_val.txt文件
- annotation_mode == 1: 根据Annotations文件夹里的样本数据生成trainval.txt, train.txt, val.txt, test.txt
- annotation_mode == 2 (推荐直接选择这个模式) : 根据ImageSets/main文件夹里的样本数据生成2007_train.txt,2007_val.txt文件
这里的2007_train.txt,2007_val.txt,是从里面获取的。
以2007_train.txt为例,其每一行的内容:(图片名字,边界框1,边界框1的类别,边界框2,边界框2的类别, …,)
4. dataloder的讲解
该文件在utils/dataloder.py,这一步与voc_annotation.py衔接紧密
具体说明如下:
- 该dataloader将返回image, box:(左上点x坐标, 左上点y坐标, 右下点x坐标, 右下点y坐标), label, 这里的数据是以两个点的坐标为标签的,但是在RPN网络里面的预测,其实是通过左上点,以及W,H做的修正,并不冲突,因为两点相减就能得到W,H。
- 该dataloader将根据要求的尺寸,先布局一张灰色背景,然后将原图和真实框放在灰色背景正中央。
- 这里其实我调整了原公开的代码,没有在训练的时候采取缩放处理。因为缩放后,会导致真实框与实际缩放图片内容不符合,后续再做改进吧。
- frcnn_dataset_collate函数的作用是在训练时,将每个batch的数据从numpy转为torch。
5. 训练过程train.py的讲解
如果没有特殊说明,都是在讲解train.py,随着代码解释越深,就需要引出其他文件,届时会指出。
整个网络训练,有冻结和解冻两个阶段,具体流程如下:
- 1.超参数配置。
- 2.加载模型。
- 3.Loss记录的初始化。
- 4.数据集加载。
- 5.迭代次数的判断。
- 6.学习率和优化器的设置。
- 7.初始化FasterRCNNTrainer类。
- 8.记录eval的map曲线。
- 9.模型训练的过程–冻结训练和解冻训练。
- 10.每次训练轮回的函数讲解。
5.1. 超参数配置
1. Cuda[bool]: 判断是否使用GPU
2. seed[int]: 设置所有需要的随机数种子,这样能够保证下每次训练获得结果一样
3. train_gpu[list]: 训练所用到的GPU数量号
4. fp16[bool]: 是否使用混合精度训练
5. classes_path[str]: 对应训练数据集的标签类别名称的存放路径
6. model_path[str]: 整个模型的权重路径,这里不影响backbone的预训练权重
7. input_shape[list]: 网络输入尺寸,也是对数据集中图片输入大小的设定
8. backbone[str]: 设置backbone的名称,例如vgg和resnet50
9. pretrained[bool]: 设置backbone是否使用预训练权重
10. anchors_size[list]: 先验框的大小设置,具体可见anchors.py
11. Init_Epoch[int]: 初始训练轮数
12. Freeze_Epoch[int]: 模型冻结训练的轮数,这里冻结了backbone的权重
13. Freeze_batch_size[int]: 冻结训练时的batch
14. UnFreeze_Epoch[int]: 总训练轮数,解冻的轮数应该是UnFreeze_Epoch-Freeze_Epoch
15. Unfreeze_batch_size[int]: 模型在解冻后的batch_size
16. Freeze_Train[bool]: 是否进行冻结训练
17. Init_lr[float]: 模型的初始学习率
18. Min_lr[float]: 模型的最小学习率(训练过程中调整的最小学习率)
19. optimizer_type[str]: 优化器种类,可选的有adam、sgd
20. momentum[float]: 优化器内部使用到的momentum参数
21. weight_decay[int or float]: 权值衰减参数(防止过拟合)
22. lr_decay_type[str]: 使用到的学习率下降方式,可选的有'step'、'cos'
23. save_period[int]: 多少个epoch保存一次权值
24. save_dir[str]: 权值与日志文件保存的文件夹路径
25. eval_flag[bool]: 是否在训练时进行评估,评估对象为验证集
26. eval_period[int]: 代表多少个epoch评估一次
27. num_workers[int] 用于设置是否使用多线程读取数据
28. train_annotation_path[str]: 训练集路径,即2007_train.txt文件
29. val_annotation_path[str]: 验证集路径,即2007_val.txt文件
根据超参数的名称以及配置,也能大致了解训练代码的整体框架。
5.2. 加载模型
这里可以选择是否要加载训练好的faster-rcnn权重,一般第一次训练网络是没有的。
这里原作者提供了网盘代码,有需要的可以自行去找。
这里的加载方式划重点:
model_dict = model.state_dict()
pretrained_dict = torch.load(model_path, map_location=device)
load_key, no_load_key, temp_dict = [], [], {}
for k, v in pretrained_dict.items():
if k in model_dict.keys() and np.shape(model_dict[k]) == np.shape(v):
temp_dict[k] = v
load_key.append(k)
else:
no_load_key.append(k)
model_dict.update(temp_dict)
model.load_state_dict(model_dict)
这种方法加载了现在写的模型里,能够加载的权重键值对,而避免了不在’.pth’的键值对报错现象。
其思路则是,先将现在模型的键值对取出,同时也加载预训练的键值对,根据匹配更新现在模型的键值对,并且重新加载。
5.3. Loss记录的初始化
这里要看callbacks.py文件里面的LossHistory类,采用了两种记录方式:
- 第一种: tensorboard中SummaryWriter类来进行Loss值的记录。
- 第二种: txt与plot来记录loss值。
5.4 数据集加载
根据变量train_annotation_path和val_annotation_path找到 "VOC2007_train.txt"和"VOC2007_val.txt"的路径,并且使用写好的dataset类利用Dataloader加载。
注意,这里的batch size需要判断是不是冻结训练,冻结和解冻两个阶段的batch size可以单独。
wanted_step = 5e4 if optimizer_type == "sgd" else 1.5e4
total_step = num_train // Unfreeze_batch_size * UnFreeze_Epoch
这里的要求 total_step >= wanted_step, 如果不满足就建议调整一下,这里即便不调整,也会给出建议的训练轮次设置。
5.5 迭代次数的判断
这里主要是判断总的迭代次数(epoch乘以每一次epoch需要迭代的次数):模型训练的迭代次数(由数据集规模体现)是否大于不同优化器的要求次数,这里的要求次数是个大概范围。
5.6 学习率和优化器的设置
根据是否采取冻结训练,确定batch_size,然后根据batch_size选择学习率。
同时,选择好优化器。
5.7 初始化FasterRCNNTrainer类
参考frcnn_training.py,该类主要是将model包装好,然后在训练的时候,通过调用函数的形式计算损失并返回。
在训练过程中,该类的forward具体步骤:
输入 —> imgs, bboxes, labels, scale
输出 —> losses
-
- 先获得公共特征,即backbone输出的feature map。
-
- 根据公共特征,利用rpn网络获得调整参数、得分、建议框、先验框,接下来取batch的每一个样本处理。
-
- 先利用先验框和真实边界框计算rpn网络的损失函数:
-
- 先计算每个真实框与其所有先验框的iou值,并根据此来打上类别标签。这里是类别标签(1表示正样本,0表示负样本,-1则忽略),这里的正样本负样本实则就是先验框与真实框的IoU是否大于阈值判断的。这里保证正负样本数量平衡,各为128,一共256个样本参与了损失函数计算。
-
- 根据每张图片的每个真实框,给每个真实框的所有先验框打上定位标签。定位标签,则是通过真实框和先验框的换算关系得到的定位偏移量。
-
- 利用定位标签计算回归损失,利用类别标签计算分类损失。回归损失选用Smooth L1损失,分类损失选用交叉熵损失函数(这里忽略掉标签-1的计算)。
-
- 再利用建议框和真实边界框计算classifier网络的损失函数:
-
- 先计算每个真实框与其所有建议框的iou值,并根据此打上定位标签和类别标签。类别标签是真实的样本标签+1(因为有背景0)。保证计算的正负样本数量平衡,各为56,一共128个样本参与了损失函数计算。
-
- 利用faster-rcnn的head模式,得到最终预测的定位loc预测与标签预测。
-
- 利用定位标签计算回归损失,利用类别标签计算分类损失。回归损失选用Smooth L1损失,分类损失选用交叉熵损失函数(这里忽略掉标签-1的计算)。
-
- 返回一个包含五个元素的loss列表: (RPN定位损失, RPN分类损失, ROI定位损失, ROI分类损失, 所有损失项的和)
5.8 记录eval的map曲线
请自行了解map指标知识点,这里暂时跳过!
5.9 模型训练的过程–冻结训练和解冻训练
模型在设置的总epoch,即UnFreeze_Epoch-Init_Epoch里,每一个epoch训练步骤如下:
-
- 首先判断是冻结训练的轮次还是解冻训练的轮次。如果是冻结训练的轮次,保持训练。如果是解冻训练的轮次,那就需要根据batch_size重新调整学习率,重新加载dataloader,再训练。
-
- 根据训练轮回来更新学习率
-
- 利用fit_one_epoch函数完成每个轮回的训练
5.10 fit_one_epoch函数步骤讲解
具体步骤:
-
- 开始训练: 调用FasterRCNNTrainer的实例,计算损失函数,并反向传播。
-
- 开始验证: 调用FasterRCNNTrainer的实例,计算损失函数,不反向传播。
-
- 将损失函数记录下来。
-
- 计算map。
-
- 保存模型权重: 第一,按照epoch的周期形式存放;第二,按照验证损失最好的模型存放;第三,存放当前epoch模型权重。
6. predict.py的讲解
预测文件一共可以实现4种模式的推理:
- predict: 表示单张图片预测。
- video: 表示视频检测。
- fps: 表示测试fps。
- dir_predict: 表示遍历文件夹进行检测并保存。
6.1 超参数配置
1. model[str]: 4种推理模式
2. crop[bool]: 在predict模式下,指定是否在单张图片预测后对目标进行截取
3. count[bool]: 在predict模式下,指定是否进行目标的计数
4. video_path[int, str]: 在video模式下, 待检测视频的路径,可以设置为0调用摄像头
5. video_save_path[str]: 在video模式下, 保存检测视频的路径
6. video_fps[float]: 在video模式下, 用于保存的视频的fps
7. test_interval[int]: 在fps模式下, 指定测量fps的时候,图片检测的次数
8. fps_image_path[str]: 在fps模式下, 指定测试图片路径
9. dir_origin_path[str]: 在dir_predict模式下,检测的图片的文件夹路径
10. dir_save_path[str]: 在dir_predict模式下,检测完图片的保存路径
预测功能的4种模式实现是调用predict.py同级下的frcnn.py中的FRCNN类当中方法实现的接下来讲解该类即可。
6.1 预测需要的FRCNN类
事实上faster-rcnn的目标检测结果是通过:rpn网络得到的roi与最后classifier回归出的预测调整参数结合,得到的目标预测结果。
第一步,初始化FRCNN类
这里需要完成动态属性设置、获得种类和先验框的数量、 边界框解码工具、画框设置不同的颜色以及载入模型等初始化操作。
这里的边界框解码工具需要参考utils_bbox.py里的DecodeBox类,6.2小节会讲解。
第二步,detect_image方法
接收一张图像作为输入,通过模型进行目标检测,并将检测结果绘制在图像上。
- 计算输入图片的高和宽
- 计算resize后的图片的大小
- 图像预处理
- 模型推理
- 提取检测结果
- 设置字体与边框厚度
- 目标计数
- 目标裁剪(如果crop为True)
- 图像绘制
第三步,get_FPS方法
返回预测的fps数值
第四步,get_map_txt方法
返回map计算值
6.2 DecodeBox类
DecodeBox类主要功能是将目标检测模型的输出(如候选框、类别置信度等)解码为最终的检测结果。因为需要与rpn网络的roi以及classifier回归预测的调整参数进行结合。
1.frcnn_correct_boxes方法
将框的中心点坐标和宽高转换为左上角和右下角坐标,将框的坐标从输入图像的尺度调整到原始图像的尺度。
2.重写forward方法
- 回归参数调整:将回归参数应用于候选框,调整框的坐标。
- 框的归一化:将框的坐标归一化到 [0, 1] 范围。
- 分类置信度计算:对类别置信度进行 softmax 操作。
- 置信度筛选:筛选出置信度大于阈值的框。
- 非极大抑制(NMS):去除重叠较高的框,保留置信度最高的框。
- 框的尺度调整:将框的坐标从归一化尺度调整到原始图像尺度。
最后返回的格式为(y_min, x_min, y_max, x_max, confidence, class_id)
7. 训练过程及预测可视化
这是我自己训练的一个截图,使用的VOC2007数据集,主要就是epoch=100,pretrained=False,Freeze_Train=False
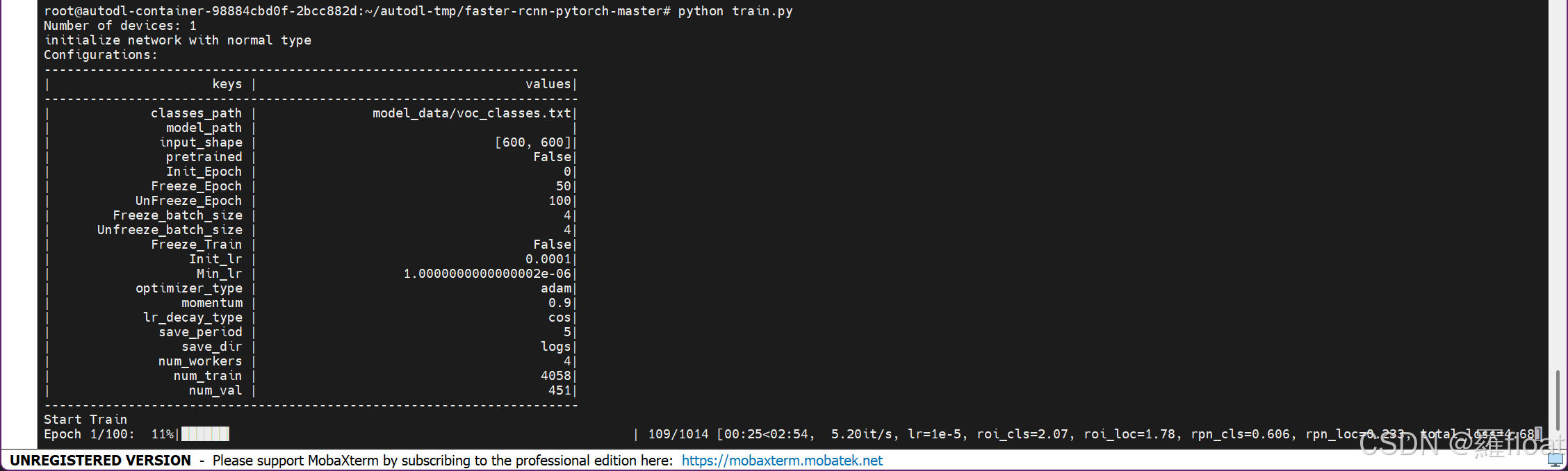
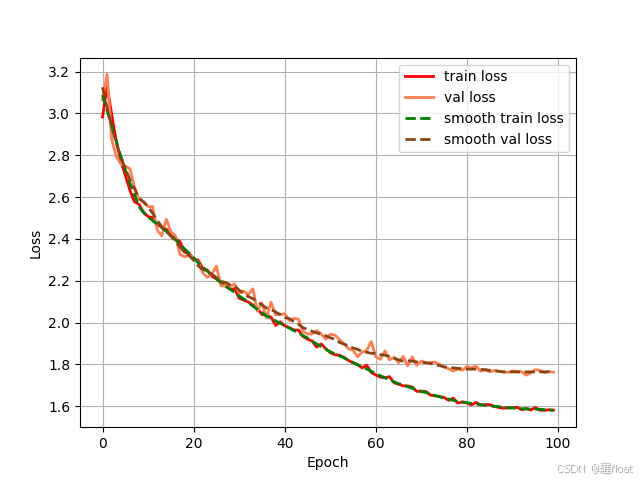
训练的损失函数:
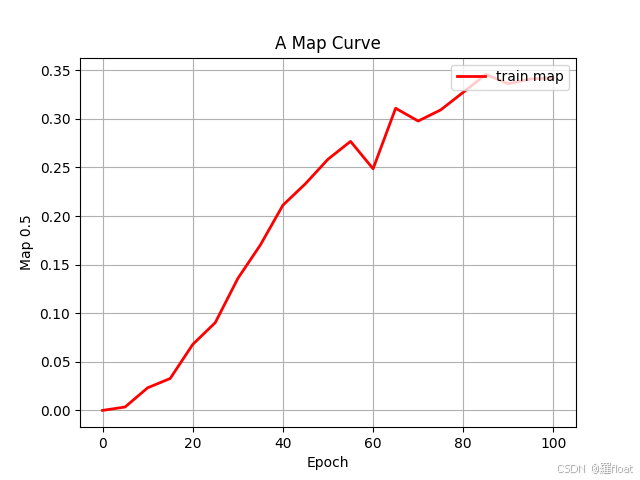
训练的map图:
最后的预测结果:
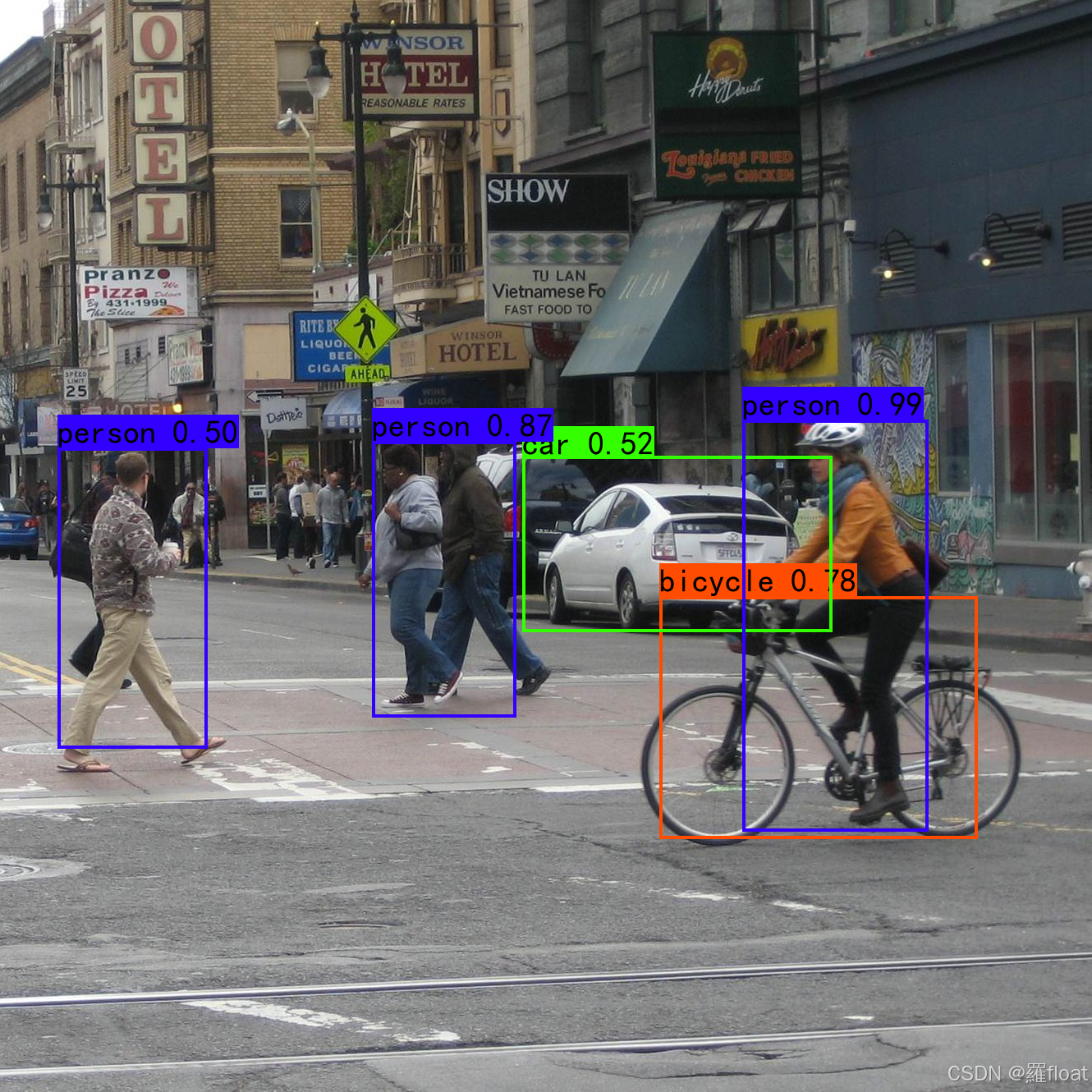
预测的可视化能够感觉到,目前效果不是很好,不过勉强实现了目标检测整个流程,剩下的不过是加深训练,调参训练,加油,未来可期!


















 4198
4198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











