






一、PointNet++核心思想
- 与PointNet的关系与改进
• PointNet局限性:直接对全局点云做最大池化,无法捕捉局部结构(如曲面连续性、边缘锐度)。
• PointNet++创新:引入层次化特征学习,通过多级 Set Abstraction(集合抽象) 模块,逐步扩大感受野,实现从局部到全局的语义理解。
- Set Abstraction三步骤
• 采样(Sampling):使用最远点采样(FPS)选取关键点作为局部区域中心。
• 分组(Grouping):以每个中心点为中心,按半径或K近邻划分局部点集。
• 特征提取(Feature Extraction):通过共享权重的多层感知机(MLP)提取局部特征。
二、模型结构
- 层级结构概览
(
(sa1): PointNetSetAbstraction(...) # 第1级抽象
(sa2): PointNetSetAbstraction(...) # 第2级抽象
(sa3): PointNetSetAbstraction(...) # 第3级抽象
(fc1): Linear(...) # 分类头部
(bn1): BatchNorm1d(...)
(drop1): Dropout(...)
(fc2): Linear(...)
(bn2): BatchNorm1d(...)
(drop2): Dropout(...)
(fc3): Linear(...) # 输出
)
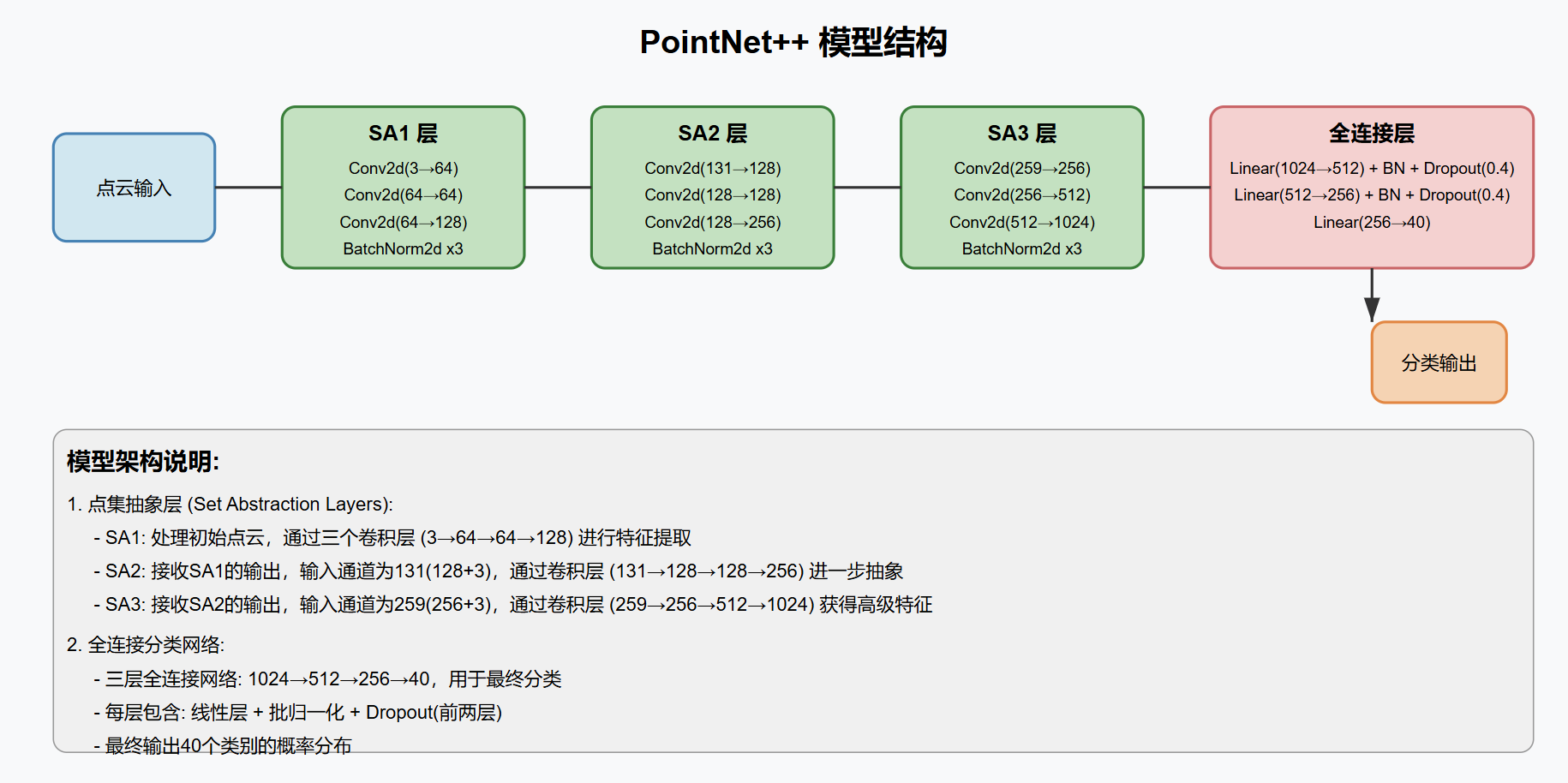
- Set Abstraction层详解(以sa1为例)
(sa1): PointNetSetAbstraction(
(mlp_convs): ModuleList(
(0): Conv2d(3, 64, kernel_size=(1,1)) # 输入3通道(x,y,z坐标),输出64维特征
(1): Conv2d(64, 64, kernel_size=(1,1)) # 保持64维,增强非线性
(2): Conv2d(64, 128, kernel_size=(1,1)) # 升维至128,捕获更高阶特征
)
(mlp_bns): ModuleList(...) # 每个卷积层后接BatchNorm
)
• 输入数据:原始点云坐标(N×3矩阵,N为点数)。
• 1×1卷积作用:等效于逐点全连接层,允许不同通道间的信息交互,同时保持点独立性。
• BatchNorm:加速训练收敛,缓解梯度消失/爆炸。
- 通道数变化规律
• sa1输入:3通道(坐标) → 输出:128维局部特征。
• sa2输入:131通道 = 128(上层特征) + 3(坐标) → 输出:256维。
• sa3输入:259通道 = 256(上层特征) + 3(坐标) → 输出:1024维全局特征。
• 设计逻辑:通过残差连接保留坐标信息(类似PointNet中的T-Net),增强空间感知。
- 分类头部设计
(fc1): Linear(1024→512) # 降维至512
(bn1): BatchNorm1d(512) # 稳定特征分布
(drop1): Dropout(p=0.4) # 防止过拟合
(fc2): Linear(512→256) # 进一步压缩
(fc3): Linear(256→40) # 输出分类结果
• Dropout:在训练阶段随机屏蔽神经元,提升模型泛化性。
• 层级压缩:逐步降低维度,聚焦区分性特征。
三、关键技术与优势
- 层次化局部感知
• sa1:捕捉细粒度局部结构(如边缘、角点)。
• sa2:整合中等范围结构(如物体部件)。
• sa3:提取全局上下文(如物体整体形状)。
-
置换不变性(Permutation Invariance)
• 最大池化对称函数:在Set Abstraction末端对局部点集特征取最大值,消除点序影响。 -
鲁棒性增强
• 多尺度分组:通过不同半径分组应对稀疏性与密度变化。
• 动态特征聚合:自适应调整不同层次特征的贡献(通过MLP权重学习)。
四、与PointNet的对比
| 特性 | PointNet | PointNet++ |
|---|---|---|
| 特征提取范围 | 全局一次性聚合 | 分层局部到全局 |
| 局部结构建模 | 弱(依赖全局池化) | 强(多级Set Abstraction) |
| 计算复杂度 | 低(单级结构) | 高(多级采样与分组) |
| 适用场景 | 简单形状分类 | 复杂场景分割、细节重建 |
五、典型应用场景
- 3D物体分类。
- 点云分割:通过反向插值将全局特征传播至每个点。
- 场景理解:结合多尺度特征识别室内外场景中的物体。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









