







【1】研究背景
随着计算机,微电子技术的快速发展,智能化技术的开发越来越快,智能程度也越来越高,应用的范围也得到了极大的扩展。因此,基于嵌入式技术的智能小车应运而生。
近来两年,智能小车在生活中有着广泛的应用,如自动驾驶技术、引导机器人、自动化生产线上的物料陪送机器人等。循迹小车也是智能小车的一种,归属于机器人的范畴。目前,自动驾驶和智能小车的应用也越来越广泛。
基于STM32F103主控板搭建智能小车的控制系统,并采用模块化的设计思想编写控制系统程序,为能够在复杂地形下进行巡检作业的轮式小车研究提供理论依据。
【2】实训环境
(一) 实训环境
Java环境、STM32CubeMX、Keil5、st-link v2驱动安装、Pl2303驱动安装
(二) 环境介绍
(1)Java 环境:
STM32CubeMX环境需要Java支持,所以第一步必须要安装Java
双击Java安装包:~/stm32环境必备/jdk-7u60-windows-x64.exe
注意: 安装过程中,直接选择下一步,请不要更改文件安装路径
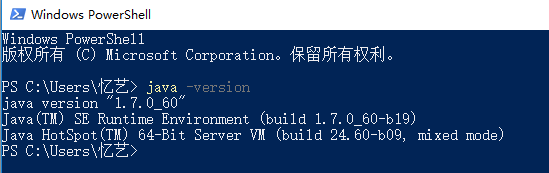
检测java是否安装成功:打开cmd(左下角搜索cmd或者windows+r运行内输入cmd),输入java –version,显示如下信息,则说明安装成功,如果安装不成功,查看下页app,进行设置。
(2) STM32CubeMX
1.双击打开文件:~/stm32环境必备/ SetupSTM32CubeMX-4.9.0.exe
2.直接选择下一步即可(注意:不要修改安装路径,安装路径不能有中文)
3.安装成功后,桌面上会有图标

4.如果图标上面不显示图案,点击图标,右键—属性—更改图标,双击图标,确定即可
5.导入芯片包
5.1.双击图标打开软件,选择Help—Install New Libraries—From…
5.2双击鼠标选择文件:~/stm32环境必备/ stm32cubef1_1.3.1.zip,等待自动加载完成即可
(3) Keil5
1.双击打开文件:~/stm32环境必备/mdk514.exe,按照提示安装,选择默认路径即可,安装时间较长,请耐心等待
2.安装完成之后可能会弹出一个窗口,关闭即可
3.安装芯片包: ~/stm32环境必备/ Keil.STM32F1xx_DFP.1.1.0.pack
(4) st-link v2 驱动安装
st-link v2是我们下载stm32程序的接口,该硬件需要安装驱动,方法如下:
找到驱动文件&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3289
3289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









