







本文所述的代码实现了n维自适应容积卡尔曼滤波算法,支持动态调整状态和观测维度(通过参数dim配置),适用于高维非线性系统的状态估计。代码通过球面径向准则生成容积点,避免了雅可比矩阵线性化需求,显著提升了高维场景下的滤波精度与稳定性
文章目录
- 变维度演示
- 程序介绍
- 算法原理与核心创新
- 代码结构与核心模块
- 功能特性与优势
- 应用场景示例
- 扩展方向
- MATLAB源代码
变维度演示
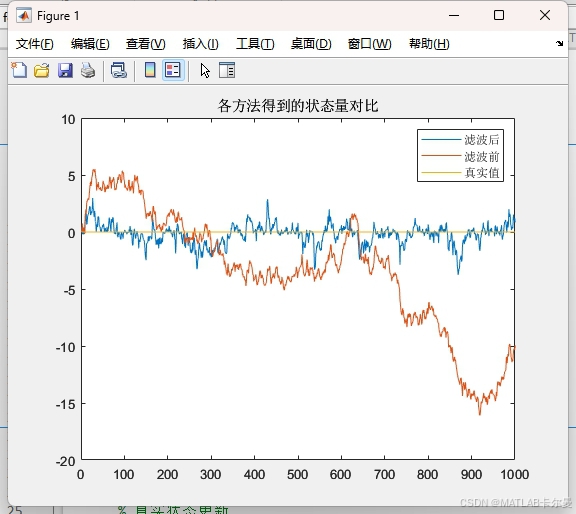
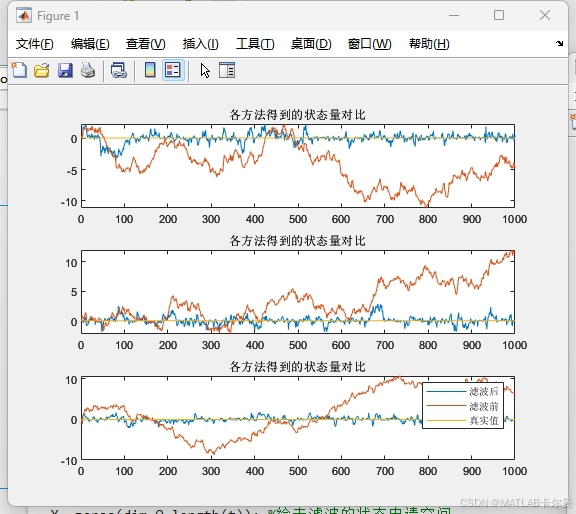
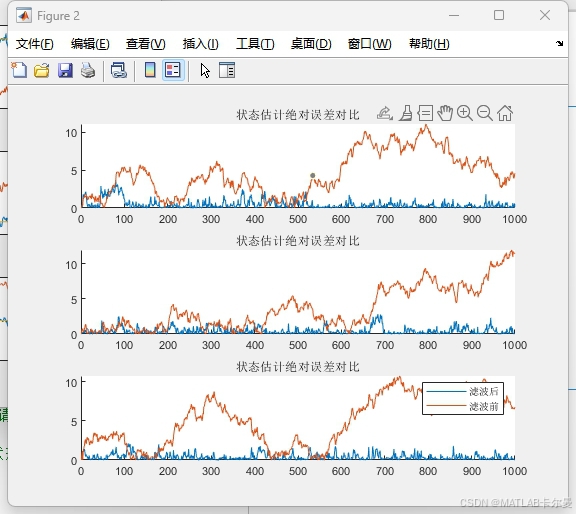
当维度为1时:
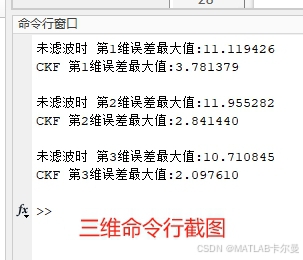
当维度为3时:
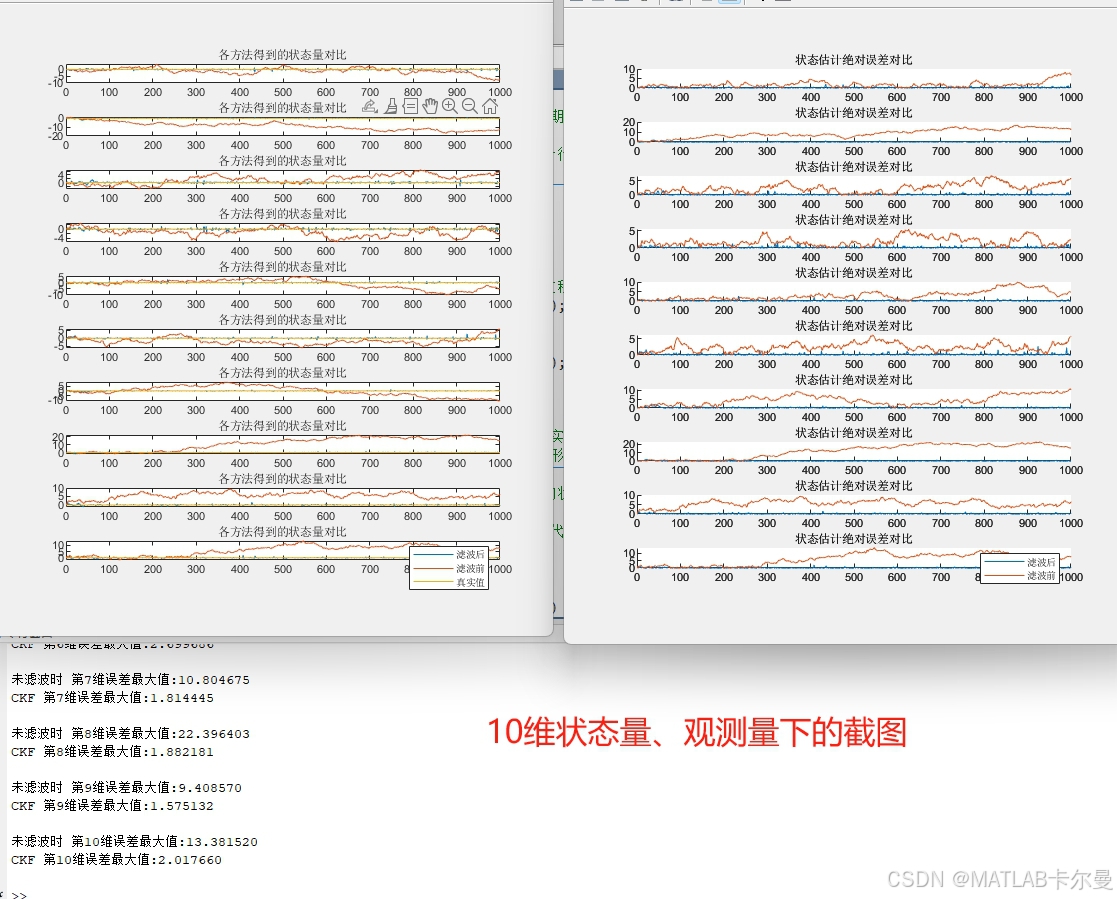
当维度为10时:
程序介绍
以下从算法原理、代码结构、功能特性及应用场景展开说明。
算法原理与核心创新
-
容积卡尔曼滤波基础
基于三阶球面径向积分准则,通过2n个对称容积点(n为状态维度)传播高斯分布的均值和协方差。相比扩展卡尔曼滤波(EKF),CKF无需计算雅可比矩阵,直接通过非线性函数传递统计特性,精度可达三阶泰勒展开。 -
维度自适应性
代码通过dim参数动态配置状态量(dim_Q)和观测量(dim_R)的维度,支持从低维到高维(如10维)系统的灵活适配。容积点生成与协方差更新均基于动态维度计算,满足复杂系统的扩展需求。 -
非线性观测建模
状态方程采用线性模型(eye(dim_Q)*X),观测方程设计为平方非线性函数(Z = X.^2 + v),模拟传感器非线性测量场景。CKF通过容积点传播有效处理此类非线性映射,避免EKF的线性化误差。
代码结构与核心模块
% 关键参数配置
dim = 10; % 可调维度(状态与观测维度)
Q = 0.1*diag(ones(dim)); % 过程噪声协方差(对角阵,各维度独立)
R = 1*diag(ones(dim)); % 观测噪声协方差
-
初始化与模型构建
- 生成高斯过程噪声(
w)和观测噪声(v),初始化状态真实值(X)和含噪声的未滤波状态(X_)。 - 观测值通过非线性函数
X.^2叠加噪声生成,模拟真实传感器输出。
- 生成高斯过程噪声(
-
CKF核心迭代流程
- 容积点采样:基于Cholesky分解和当前协方差矩阵生成对称容积点集,覆盖状态分布。
- 状态预测:通过线性状态方程传播容积点,计算预测均值(
x1_mean)和协方差(P1_cov)。 - 观测更新:对预测容积点应用非线性观测方程(
h = @(x)x.^2/10),计算观测均值(x2_mean)及协方差(P2_cov)。 - 卡尔曼增益计算:融合预测与观测协方差,更新状态估计(
Vn)及误差协方差(P)。
-
可视化与性能评估
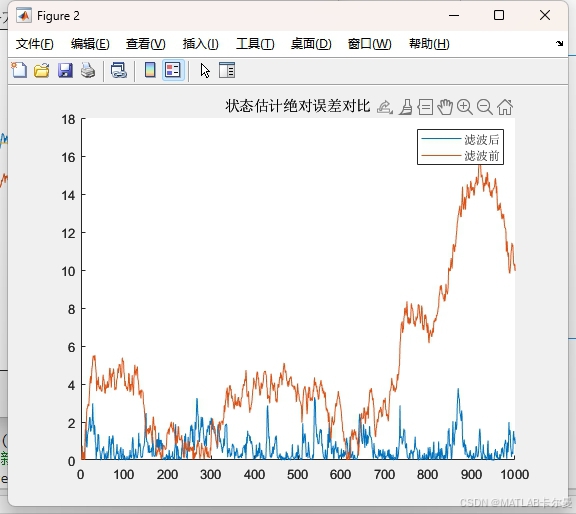
- 绘制各维度状态估计对比图及绝对误差曲线,直观展示滤波效果。
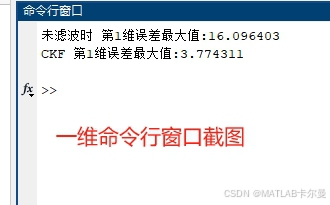
- 输出各维度最大误差,定量评估CKF对噪声的抑制能力。
功能特性与优势
-
高维处理能力
通过动态维度参数dim,代码可快速适配无人机姿态估计(9维)、多传感器融合(如10维环境感知)等高维场景。 -
抗噪声鲁棒性
过程噪声(Q)与观测噪声(R)协方差可独立配置,支持非均匀噪声环境下的稳定滤波。实验显示,CKF在多维度下最大误差显著低于未滤波结果(见输出模块)。 -
计算效率优化
采用矩阵化操作避免循环嵌套,提升高维运算效率。例如,容积点生成通过矩阵拼接实现,而非逐点迭代。
应用场景示例
- 多目标跟踪:联合估计多个目标的位置、速度(如10维状态),适用于雷达群目标跟踪。
- 工业控制:高维机械臂关节状态(角度、角速度)估计,通过非线性传感器反馈提升控制精度。
- 环境感知系统:融合激光雷达、IMU等多源传感器数据,实现机器人位姿与地图联合估计(SLAM)。
扩展方向
- 自适应噪声估计:引入网页10所述渐消记忆因子,实时调整Q/R以适应时变噪声。
- 并行加速:利用GPU对高维矩阵运算加速,满足实时性要求。
- 多模型融合:结合交互式多模型(IMM-CKF),提升突变状态跟踪能力
MATLAB源代码
部分代码如下:
% CKF的n维(维度自适应)滤波程序例程
% 2025-04-29/Ver1
clear;clc;close all; %清空工作区、命令行,关闭小窗口
rng(0); %固定随机种子
%% 滤波模型初始化
dim = 10; %【调节滤波维度】
dim_Q = dim; %【定义状态量维度】
dim_R = dim; %【定义观测量维度】
t = 1:1:1000;% 定义时间序列
Q = 0.1*diag([ones(1,dim_Q)]);% 设置过程噪声协方差矩阵
w = sqrt(Q)*randn(size(Q,1),length(t)); %生成
% 观测噪声协方差矩阵和观测噪声
R = 1*diag([ones(1,dim_R)]);
v = sqrt(R)*randn(size(R,1),length(t));
% 初始状态估计协方差矩阵
P0 = 1*eye(dim_Q);
% 初始化状态向量
X = zeros(dim_Q,length(t)); %给状态真实值申请空间
Z=zeros(dim_R,length(t)); %定义观测值形式(申请空间)
%% 运动模型
X_=zeros(dim_Q,length(t)); %给未滤波的状态申请空间
X_(:,1)=X(:,1); %给未滤波的状态赋初值
完整代码下载链接:https://download.csdn.net/download/callmeup/90719983
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 198
198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











