






树莓派生成固定脉冲数与脉冲计数
1.准备工作
- 树莓派4
- 步进电机及其驱动
- pigiod
电路设计:
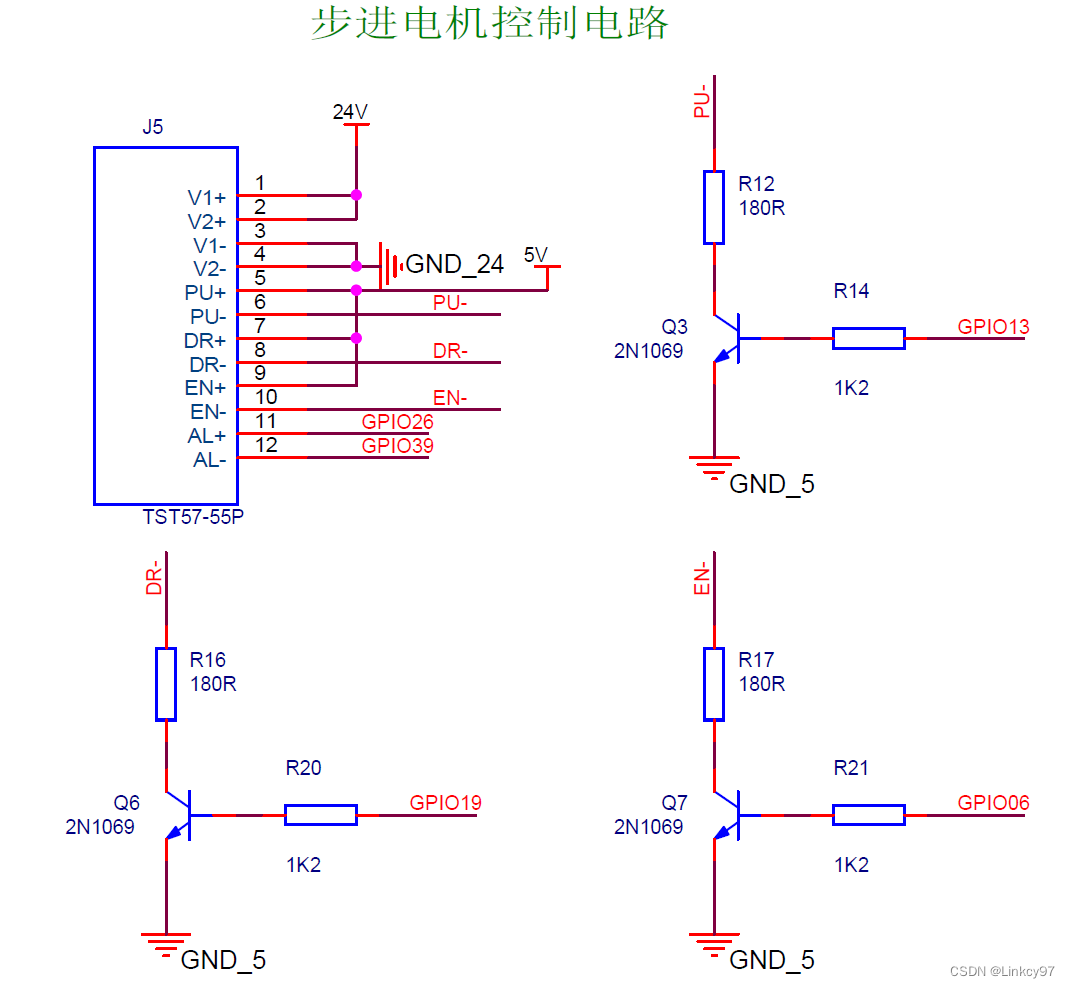
电机驱动使用共阳接法,考虑到树莓派gpio电平为3.3v,通过三极管来控制5v信号的输入从而达到控制驱动。电路图如上图所示。
我是用python版本的pigpio,安装过程不在赘述。
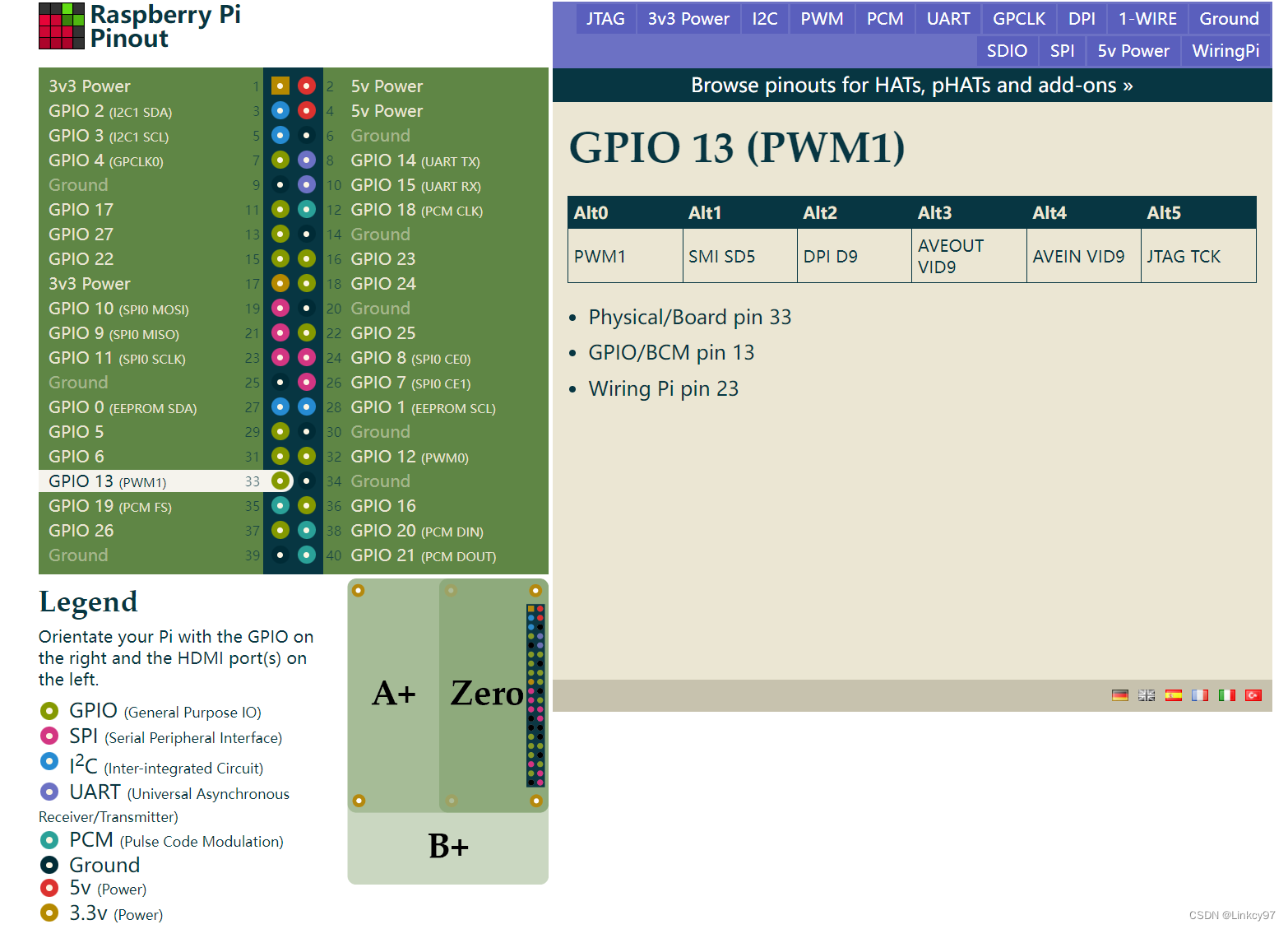
为了准确的生成脉冲数,我选用GPIO13作为PWM引脚。GPIO 13 (PWM1) at Raspberry Pi GPIO Pinout
2.python代码实现
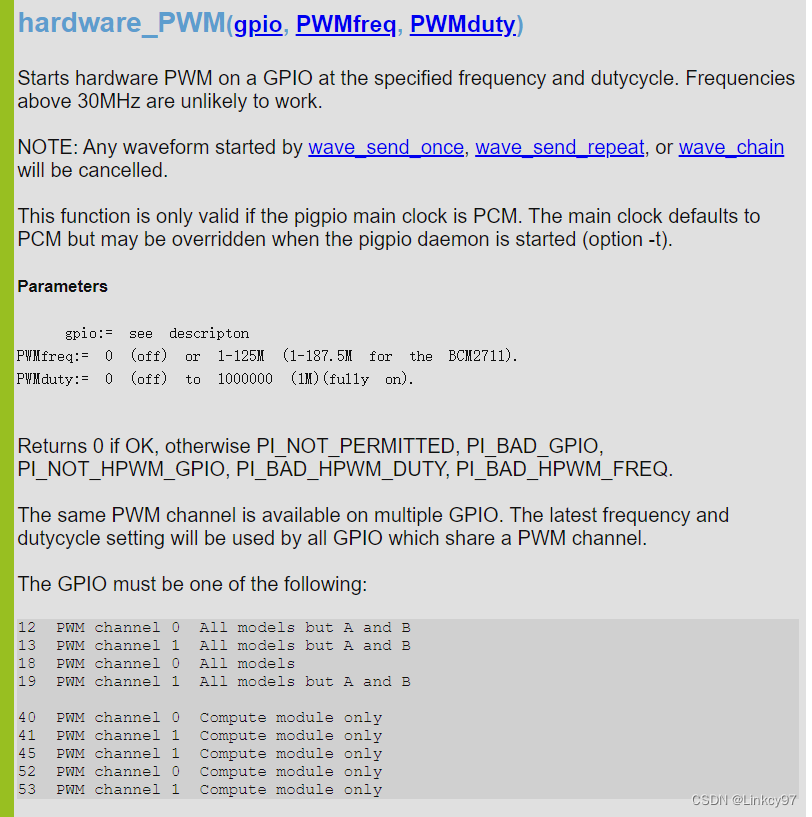
参考pigpio网站,使用wave_chain(data)函数实现,如果想要一直生成脉冲数,使用hardware_PWM这个函数即可
def tx_pulses(self,hertz, num,direction='go'):
self.tx_state = True
self.pi.set_mode(H_motor_pwm,pigpio.OUTPUT)
assert hertz < 500000
self.already_slow = True
self.pi.write(H_motor_enable, 0)
if direction=='go':
self.pi.write(H_motor_direction, 0)
self.motor_state = 'go'
self.pwm_motor_state = 'go'
if direction=='back':
self.pi.write(H_motor_direction, 1)
self.motor_state = 'back'
self.pwm_motor_state = 'back'
if hertz < 300 or num < 1000:
hertz = 300
wid = [0]*9 #9种脉冲数
# 划分加速减速脉冲数量 加速阶段 正常阶段 减速阶段
num_top = int(num * 0.6)
num_up = int(num * 0.2)
num_down = num - num_up - num_top
num_down_times = num_down // 8
num_down_remainder = num_down % 8
num_up_times = num_up // 8
num_top = num_top + num_up % 8 + num_down_remainder
hertz_gear = int((hertz - 300) / 8)
# 加速阶段 从300hz开始,每个脉冲数加一个挡位 挡位:最高脉冲-300 / 8
for i in range(0,8):
pulse_len = int(1000000/(300+hertz_gear*i)/2)
self.pi.wave_add_generic(
[pigpio.pulse(1<<13, 0 ,pulse_len),
pigpio.pulse(0, 1<<13 ,pulse_len)]
)
wid[i] = self.pi.wave_create()
# 匀速
pulse_len = int(1000000/hertz/2)
self.pi.wave_add_generic([pigpio.pulse(1<<13, 0 ,pulse_len),
pigpio.pulse(0, 1<<13 ,pulse_len)])
wid[8] = self.pi.wave_create()
# 发送脉冲 对256整除再取余 Loop Repeat 255 1 x y loop x + y*256 times
num_up_circu = num_up_times // 256
num_up_remainder = num_up_times % 256
num_top_circu = num_top // 256
num_top_remainder = num_top % 256
num_down_circu = num_down_times // 256
num_down_remainder = num_down_times % 256
# print('num_up_remainder;',num_up_remainder)
# print('num_up_circu;',num_up_circu)
# print('num_top_remainder;',num_top_remainder)
# print('num_top_circu;',num_top_circu)
# print('num_down_remainder;',num_down_remainder)
# print('num_down_circu;',num_down_circu)
self.pi.wave_chain([255,0,wid[0],255,1,num_up_remainder,num_up_circu,
255,0,wid[1],255,1,num_up_remainder,num_up_circu,
255,0,wid[2],255,1,num_up_remainder,num_up_circu,
255,0,wid[3],255,1,num_up_remainder,num_up_circu,
255,0,wid[4],255,1,num_up_remainder,num_up_circu,
255,0,wid[5],255,1,num_up_remainder,num_up_circu,
255,0,wid[6],255,1,num_up_remainder,num_up_circu,
255,0,wid[7],255,1,num_up_remainder,num_up_circu,
# 255,0,wid[8],255,1,num_up_remainder,num_up_circu,
# 255,0,wid[9],255,1,num_up_remainder,num_up_circu,
255,0,wid[8],255,1,num_top_remainder,num_top_circu,
# 255,0,wid[9],255,1,num_down_remainder,num_down_circu,
# 255,0,wid[8],255,1,num_down_remainder,num_down_circu,
255,0,wid[7],255,1,num_down_remainder,num_down_circu,
255,0,wid[6],255,1,num_down_remainder,num_down_circu,
255,0,wid[5],255,1,num_down_remainder,num_down_circu,
255,0,wid[4],255,1,num_down_remainder,num_down_circu,
255,0,wid[3],255,1,num_down_remainder,num_down_circu,
255,0,wid[2],255,1,num_down_remainder,num_down_circu,
255,0,wid[1],255,1,num_down_remainder,num_down_circu,
255,0,wid[0],255,1,num_down_remainder,num_down_circu])
while self.pi.wave_tx_busy():
time.sleep(0.1)
for i in range(0,8):
self.pi.wave_delete(wid[i])
self.already_slow = False
self.motor_state = 'stop'
self.tx_state = False
该函数接收生成的脉冲数频率与个数,将总脉冲数分为262的加速过程 平稳过程 减速过程。
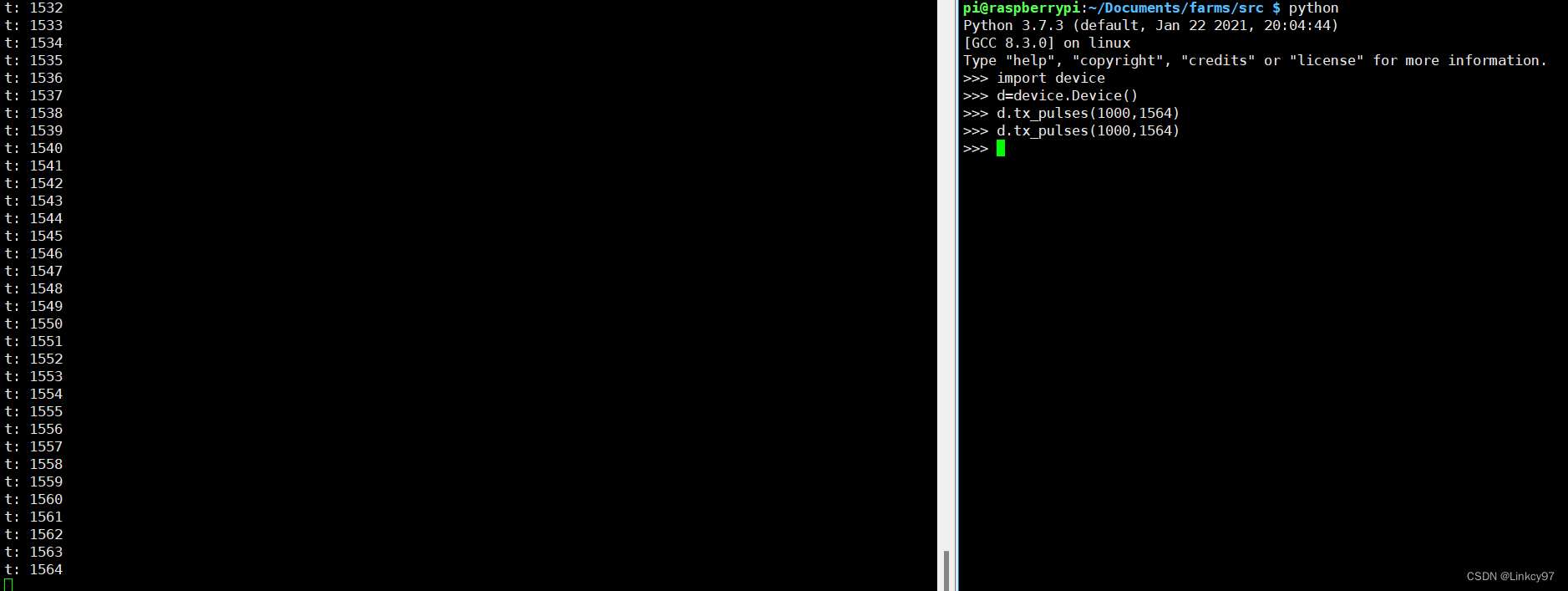
脉冲计数代码:
def count_num_test(gpio, level, tick):
global t
t += 1
print('t:',t)
if __name__ =='__main__':
cb1 = pi.callback(13, pigpio.RISING_EDGE, count_num_test)
while True:
time.sleep(1)
选定13gpio,上升沿触发。经过测试,该代码能比较准确的记录生成的脉冲数。














 3273
3273











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









