







摘要
该论文提出了一种基于特征描述符的非重叠多摄像机系统的在线自动标定方法。该方法无需初始外参参数,通过特征匹配和优化过程实现高效、精准的外参标定。论文在2018年IEEE国际机器人与仿生学会议上发表。
主要贡献
- 无初始外参的标定:提出了一种无需初始外参值的在线标定方法,适用于非重叠视场的多摄像机系统。
- 特征描述符匹配:利用特征描述符匹配技术,从不同摄像机的图像中提取并匹配特征点。
- 优化算法:采用优化算法最小化特征点的重投影误差,提高标定精度。
详细步骤
-
特征点提取与匹配:
- 从不同摄像机的图像中提取特征点,使用特征描述符(如SIFT、SURF、ORB等)进行描述。
- 通过特征匹配算法(如FLANN)在不同摄像机图像中匹配特征点。
-
初始估计与优化:
- 使用RANSAC算法剔除错误匹配点,获得初始的外参估计。
- 采用非线性优化算法(如Levenberg-Marquardt)对外参进行精细优化,最小化特征点的重投影误差。
-
实时更新与校准:
- 在车辆行驶过程中,实时采集图像数据和特征点匹配结果。
- 动态更新外参参数,保证标定结果的鲁棒性和准确性。
实验与结果
论文通过实验证明了该方法在非重叠多摄像机系统中的有效性和鲁棒性。实验证明,与传统方法相比,该方法具有更高的精度和更好的实时性能。
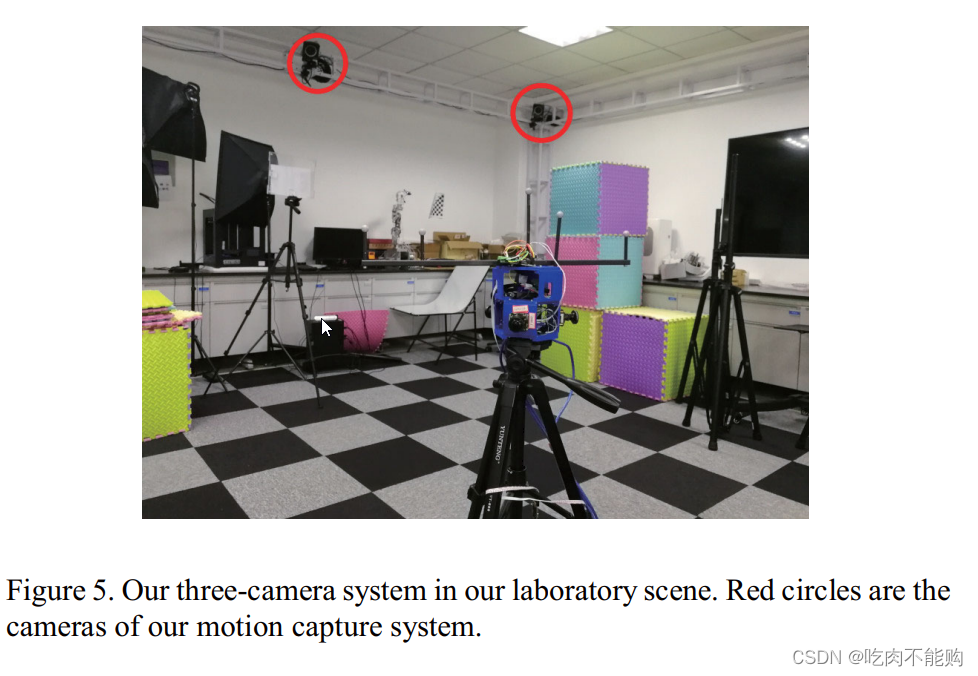
实验设计
- 数据采集:使用多摄像机系统采集实验数据,涵盖多种场景和视角。
- 特征点匹配:在每一帧图像中提取特征点并进行匹配。
- 标定精度评估:通过重投影误差和实际测试场景中的定位误差来评估标定精度。
结论
该论文提出的方法实现了非重叠多摄像机系统的高效在线标定,通过特征描述符匹配和优化算法,有效解决了无初始外参值的标定问题,适用于复杂的实际应用场景。
这篇论文为从事多摄像机系统标定研究的人员提供了一个创新且实用的方法,具有重要的参考价值。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









