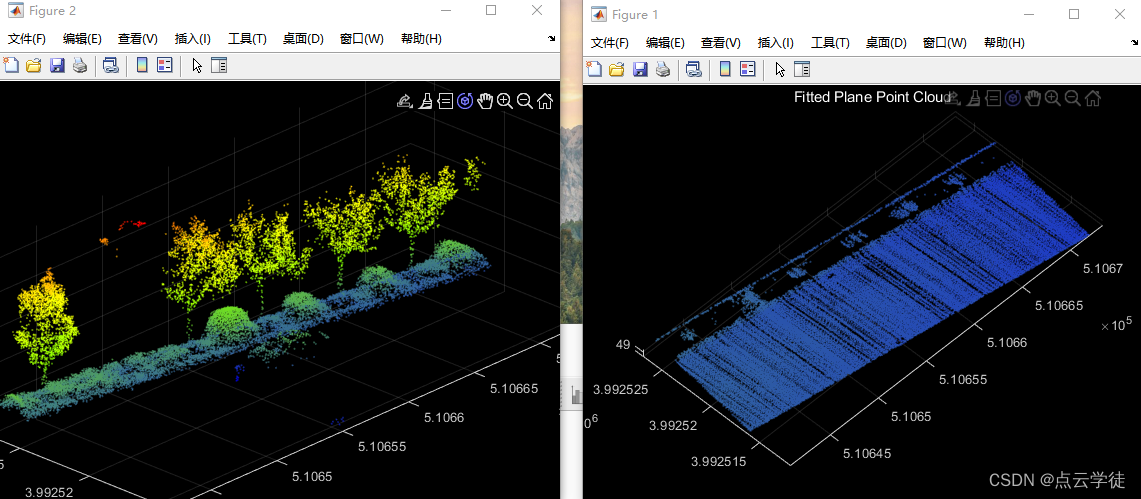
MATLAB 普通场景的道路点云分割(方法一) (56) 一、分割原理 二、算法实现 1.代码 一、分割原理 基于这样一个认识:大部分情况下,点云都是分块去处理的,在某块点云场景中,点云区域不大,地面基本是水平分布的,不会有较大的坡度,因此将其认为是一个法向与Z轴大致平行的平面,道路点云大量的集中在平面附近,因此通过提取平面近点的方法,将道路点云和其他树木等点云分割开,具体的效果如下:(左)其他点云 (右)道路点云 二、算法实现 1.代码 % 加载点云数据 ptCloud = pcread('CSDN_RGB_3.ply'); % 设置 RANSAC 参数 maxDistance = 0.3









 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2279
2279











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








