







第五章 STM32F103C8T6的HAL库定时器定时使用
文章目录
前言
本章开始学习STM32hal库的定时器的使用,了解定时器的分类,定时器的计算方法和定时器的应用,主要有定时器定时,定时器PWM输出,定时器输入捕获时间,输出捕获,此次主要讲解定时器定时。末尾附带源代码供参考学习。
`
一、定时器分类
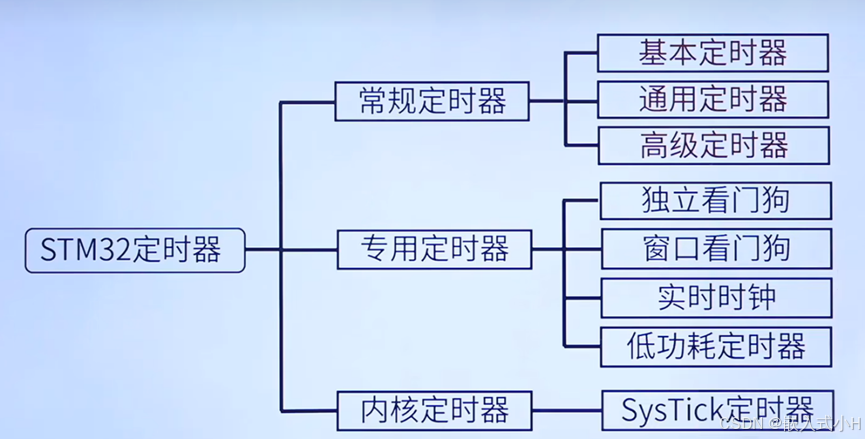
STM32 系列微控制器拥有多种类型的定时器,包括基本定时器、通用定时器和高级定时器。
1.基本定时器
基本定时器通常用于产生简单的定时信号,如为 DAC 提供触发信号等。它的功能相对较为简单,但在一些特定的应用场景中非常实用。
2.通用定时器
通用定时器功能更为强大,可用于输入捕获、输出比较、PWM 生成等多种应用。你可以通过配置通用定时器来测量输入信号的脉冲宽度、产生特定频率和占空比的 PWM 信号等。
3.高级定时器
高级定时器在通用定时器的基础上增加了更多的功能,如可以产生多达 7 路的互补 PWM 输出,非常适合用于电机控制等需要高精度 PWM 控制的场合。
下面为一些定时器的所属类型,对于STM32F103C8T6型号只有高级定时器TIM1和通用定时器TIM/2/3/4。

除此之外STM32还有专用定时器和内核定时器。
二、定时器主要功能
1.定时功能
这是定时器最基本的功能。你可以设置定时器的预分频系数和自动重装载值,从而确定定时器的定时周期。当定时器计数到自动重装载值时,会产生溢出中断,可在中断服务程序中执行相应的任务。
2.输入捕获
通过输入捕获功能,你可以测量外部输入信号的脉冲宽度、频率等参数。定时器在检测到输入信号的特定边沿时,会记录当前定时器的计数值,通过两次捕获值的差值可以计算出输入信号的参数。
3.输出比较
输出比较功能允许你在定时器的计数值与预设的比较值相等时,产生特定的输出信号。例如,可以产生一个脉冲信号或者设置一个输出引脚的电平状态。
4.PWM 生成
利用定时器可以方便地生成 PWM 信号。通过设置定时器的周期和占空比,可以产生不同频率和占空比的 PWM 波形,广泛应用于电机控制、LED 调光等领域。
三、定时器计算方法
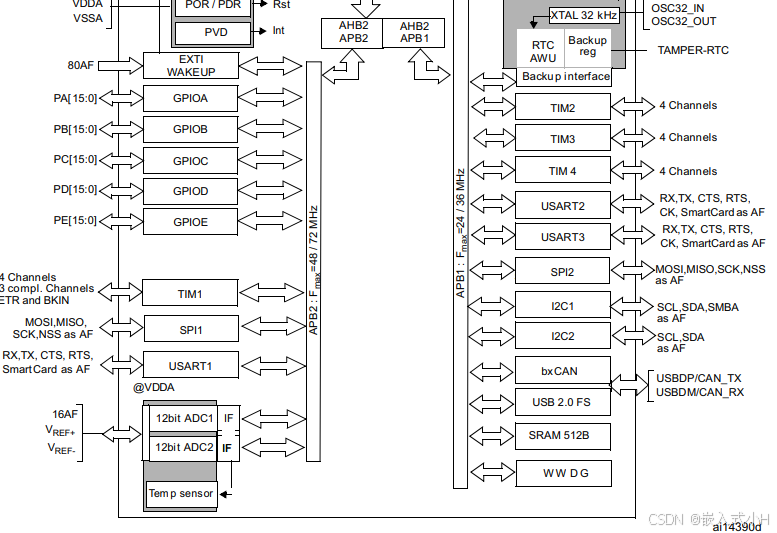
对于定时器的计算需要了解到使用的定时器挂载在哪个总线上,本次演示的为TIM4定时器,通过总线挂载图可以看到TIM4挂载在APB1总线总线上,所以最大频率为36MHz。
定时器溢出时间计算方法: Tout =( arr * psc) /clk us.
arr为自动装载值,psc为预分频系数,clk为定时器时钟频率,单位:MHz。
TIM4定时器的时钟来自APB1,当APB1分频系数为2的时候,TIM4定时器的时钟为APB1时钟的2倍, 而APB1设置为36M, 所以定时器时钟 = 72Mhz。
四、定时器定时程序编写
定时器程序编写主要为配置定时器初始化,设置预分频系数,设置自动装载值,设置定时器优先级,配置定时器中断函数,在回调函数中写入中断执行指令。
下面为time.c程序,其中执行语句为PB1引脚插入led灯每隔500ms闪一次,PB1的引脚初始化需要在led.c中添加。
#include "main.h"
TIM_HandleTypeDef g_timx_handle; /* 定时器句柄 */
/*T=预分频系数*自动成装载值/定时器时钟频率*/
void time_init(void)
{
g_timx_handle.Instance = TIM4; /* 通用定时器4 */
g_timx_handle.Init.Prescaler = 5000; /* 设置预分频系数 */
g_timx_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */
g_timx_handle.Init.Period = 7200; /* 自动装载值 */
HAL_TIM_Base_Init(&g_timx_handle);
HAL_TIM_Base_Start_IT(&g_timx_handle); /* 使能定时器x及其更新中断 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM4)
{
__HAL_RCC_TIM4_CLK_ENABLE(); /* 使能TIM时钟 */
HAL_NVIC_SetPriority(TIM4_IRQn, 1, 3); /* 抢占1,子优先级3,组2 */
HAL_NVIC_EnableIRQ(TIM4_IRQn); /* 开启ITM3中断 */
}
}
void TIM4_IRQHandler(void)
{
HAL_TIM_IRQHandler(&g_timx_handle); /* 定时器中断公共处理函数 */
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) /*定时器更新中断回调函数*/
{
if (htim->Instance == TIM4)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_1); /* LED反转 */
}
}
下面为time.h程序
#ifndef __TIME_H
#define __TIME_H
#include "main.h"
void time_init(void);
#endif
下面为main.c程序,while循环中加入PB5输出与定时器输出时间做对比。
下面为time.h程序
```c
#include "main.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
led_init();
key_init();
time_init();
while(1)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_5);
delay_ms(500);
}
}
下面是main.h程序,其中添加time.h头文件
#ifndef __main_H
#define __mian_H
#include "stm32f1xx.h"
#include "stm32f1xx_hal.h"
#include "stm32f1xx_it.h"
#include "delay.h"
#include "sys.h"
#include "led.h"
#include "key.h"
#include "exti.h"
#include "time.h"
#endif
总结
以上就是今天要讲的内容,本文简单介绍了定时器的类型,定时器的主要功能,定时器输出时间的计算方法以及定时器定时的程序编写,能够帮助读者更好地掌握STM32的应用,如果有疑问的地方或者需要源代码可以私信我,若有讲错的地方还请批评指正,让我们一起学习,一起进步。
源代码链接:https://pan.baidu.com/s/1hzCq_nN06fB_h3cj6ShVmQ
提取码:zstu


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









