







- 简介
本人研究基于遥感影像的三维重建问题一年有余,对遥感领域的相关问题有了初步了解,整理归纳后特成此贴。希望加强交流,期待批评指正。谢谢!
遥感影像的相关概念
- 遥感影像(RS: Remote Sensing Image):是指记录各种地物电磁波大小的胶片或照片,主要分为航空像片和卫星相片。用计算机处理的遥感图像必须是数字图像,内容主要包括校正、变换和分类。
- 分辨率
- 空间分辨率(Spatial Resolution):又称地面分辨率。后者是针对地面而言,指可以识别的最小地面距离或最小目标物的大小。前者是针对遥感传感器或图像而言的,指图像上能够详细区分的最小单元的尺寸或大小,或指遥感传感器区分两个目标的最小角度或线性距离的度量。它们均反映对两个非常靠近的目标物的识别、区分能力,有时也称分辨力或解像力。
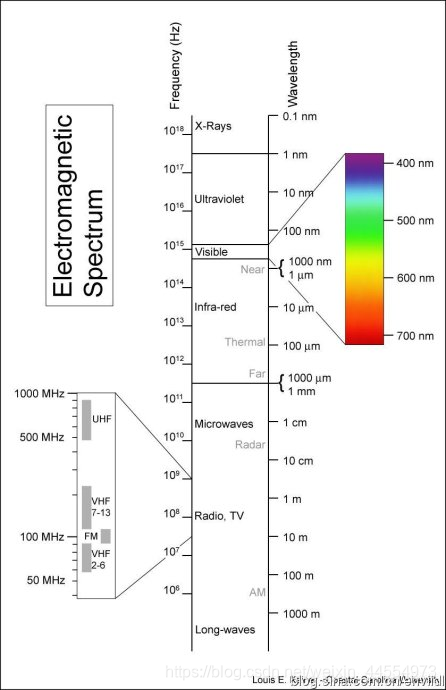
- 光谱分辨率(Spectral Resolution):指遥感器接受目标辐射时能分辨的最小波长间隔。间隔越小,分辨率越高。所选用的波段数量的多少、各波段的波长位置、及波长间隔的大小,这三个因素共同决定光谱分辨率。光谱分辨率越高,专题研究的针对性越强,对物体的识别精度越高,遥感应用分析的效果也就越好。但是,面对大量多波段信息以及它所提供的这些微小的差异,人们要直接地将它们与地物特征联系起来,综合解译是比较困难的,而多波段的数据分析,可以改善识别和提取信息特征的概率和精度。
- 辐射分辨率(Radiant Resolution):指探测器的灵敏度——遥感器感测元件在接收光谱信号时能分辨的最小辐射度差,或指对两个不同辐射源的辐射量的分辨能力。一般用灰度的分级数来表示,即最暗——最亮灰度值(亮度值)间分级的数目——量化级数。它对于目标识别是一个很有意义的元素。
- 时间分辨率(Temporal Resolution):是关于遥感影像间隔时间的一项性能指标。遥感探测器按一定的时间周期重复采集数据,这种重复周期,又称回归周期。它是由飞行器的轨道高度、轨道倾角、运行周期、轨道间隔、偏栘系数等参数所决定。这种重复观测的最小时间间隔称为时间分辨率。
- 成像方式
- 航空摄影:摄影成像是通过成像设备获取物体的影像技术。传统摄影成像是依靠光学镜头及放置在焦平面的感光胶片来记录物体影像。数字摄影则通过放置的焦平面的光敏元件,经光/电转换,以数字信号来记录物体的影像。
- 航空扫描(Pushbroom):扫描成像是依靠探测元件和扫描镜对目标物体以瞬时视场为单位进行的逐点、逐行取样,以得到目标物的电磁辐射特性信息,形成一定谱段的图像。
- 微波雷达(SAR):微波成像雷达的工作波长为1mm-1m的微波波段,由于微波雷达是一种自备能源的主动传感器和微波具有穿透云雾的能力,所以微波雷达成像具有全天时、全天候的特点。在城市遥感中,这种成像方式对于那些对微波敏感的目标物的识别,具有重要意义。
遥感图像主要由PAN(全色)、MUL(多光谱)、HYP(高光谱)和SAR(Synthetic Aperture Radar)组成。
- 光谱范围:
- 高光谱影像:
















 1148
1148











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









