







ESP32教程系列
1 - 认识ESP32
2 - Arduino IDE安装&配置
3 - 基本操作
4 - WiFi配网
5 - WebServer①
6 - Web Server②控制输出
7 - Web Server③ HTML&CSS基础
8 - Web Server④ 在Arduinio中添加HTML&CSS
9 - 异步网页服务器 Asynchronous Web Server(DHT11)
10 - OTA ESP32无线升级,告别数据线
ESP32实战系列
WiFi遥控小车
ESP32 Homekit系列
Homekit & Homespan介绍
点亮一颗LED
调节LED亮度
完整源码免费公布在微信公众号[+大钱硬件],在正文中有完整源码。
一、项目简介
在本项目中,将详细介绍如何创建一个基于 ESP32 的 Wi-Fi 遥控小车。该项目分为两部分,第一部分将讲解如何使用 ESP32 控制直流电机并组装电路,第二部分则是通过 Web 服务器编程来实现对机器人的控制。
1. 项目特点与功能
- Wi-Fi 控制:机器人通过 ESP32 利用 Wi-Fi 进行控制,创建一个基于 Web 的界面,可在本地网络中的任何设备上访问并控制小车。
- 多种控制选项:Web 服务器提供了前进、后退、右转、左转和停止这 5 种控制选项,同时还有一个滑条用于控制速度,速度可选择0、25、50、75 或 100%。
2. 所需零件
- ESP32开发板
- 小车底盘套件(底盘 + 2 个直流电机)某宝有售
- L298N 电机驱动板
- 1 个移动电源(用于给 ESP32 供电)
- 1 节 9V 电池(用于给电机供电)
- 杜邦线

二、项目详情
0. 知识背景
最好将前面的教程看过一遍之后再来看本教程,可能会更容易上手,本项目为之前教程的融合实战项目。
1. 电路接线图
电路接线较为简单,按图连接即可。
这里需要两个电源,原因是电机类消耗电流太大,会影响ESP32的供电,导致ESP32工作异常。因此需要2个电源分别给ESP32开发板和电机驱动电路进行供电。图中未标出ESP32的供电。
本项目使用L298N驱动模块,关于该模块网络上有较多的说明,此处不再重复造轮子。
注意:2个电源,L298N以及ESP的需要共地,否则不能正常运行。
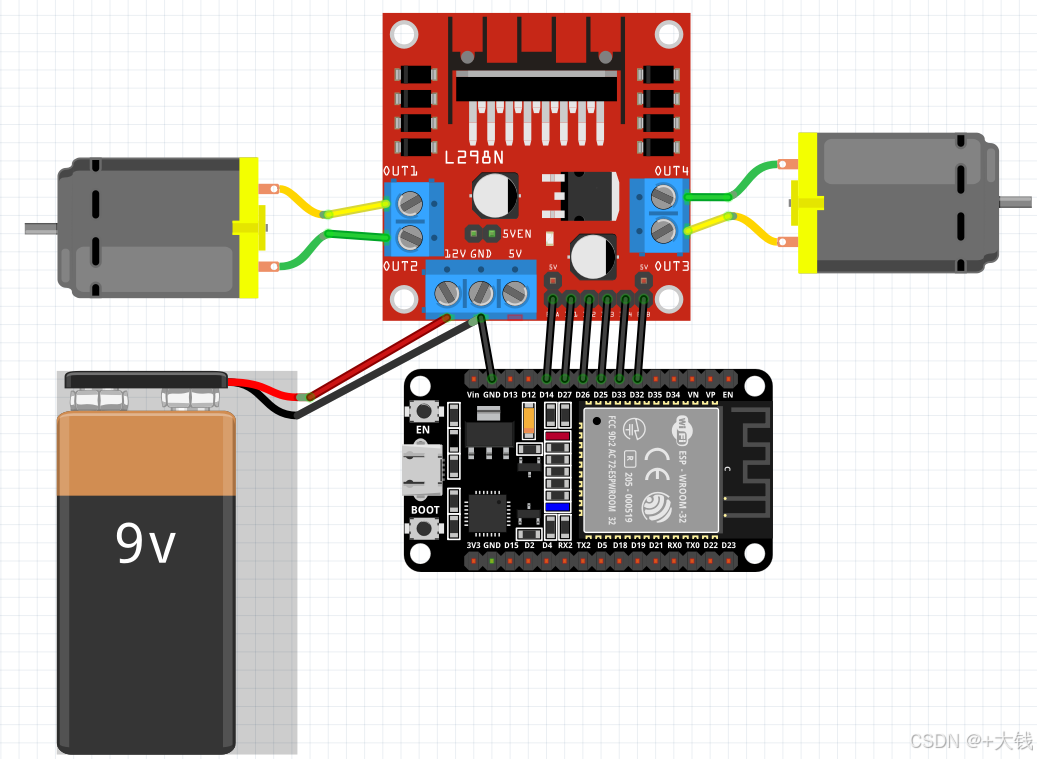
※涉及到电机的正转反转,如果与预想的不一样时,电机的接线对调下即可。
EPS32 – L298N
D14 – ENA
D27 – IN1
D26 – IN2
D25 – IN3
D33 – IN4
D32 – ENB
2. IO配置
把IN1~4配置为输出
ENA,ENB配置为PWM模式。
关于PWM的使用方法请参考ESP32教程(基于Arduino IDE)3-基本操作
// 配置电机的驱动
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(motor2Pin1, OUTPUT);
pinMode(motor2Pin2, OUTPUT);
// 配置PWM
ledcAttach(enable1Pin, freq, resolution);
ledcAttach(enable2Pin, freq, resolution);
3. 效果
在网页端输入IP地址后,会出现如下图片,可以进行单击控制小车的运行,以及速度的设置。
速度设置了5段,0,25%,50%,75%,100%。
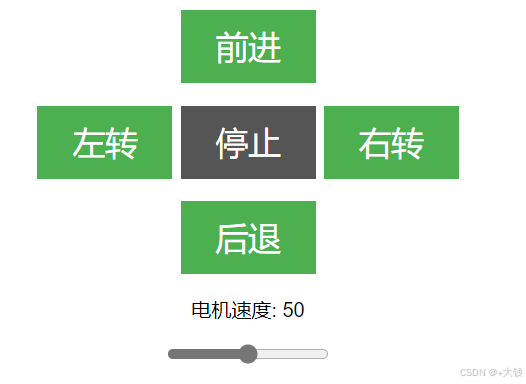
每次点击,在串口端也会有相应的反馈,如下图。
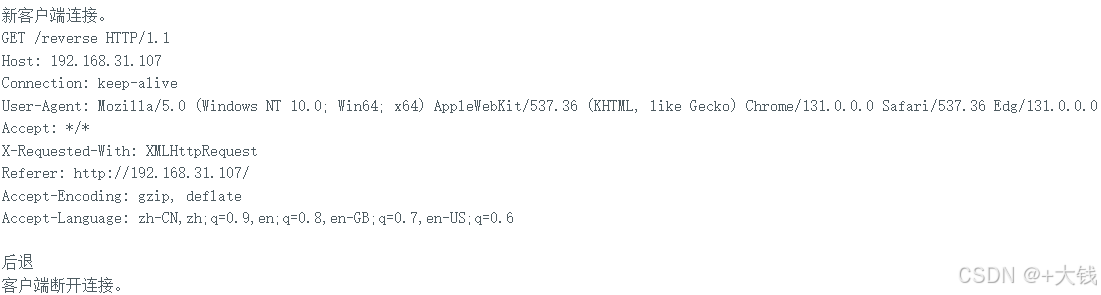
4. 关键代码说明
初始化void setup()这部分代码主要是进行初始化,在前面的教程里已讲过,不再赘述。主要是初始化了
- 配网,需要搭配ESPTouch APP来实现配网
- 初始化点击驱动
- 启动Web服务器
主循环
①控制小车部分
已前进,左转为例,当解析到Web传递回来的是forward(前进)时,则在串口中打印前进的信息,并执行前进的代码。前后左右的控制的连接主要用else if语句来做条件变换。
if (header.indexOf("GET /forward") >= 0) { // 如果请求是前进
Serial.println("前进");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
} else if (header.indexOf("GET /left") >= 0) { // 如果请求是左转
Serial.println("左转");
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
}
②网页画面显示部分
较之前不同的是本次添加了一个滑动条来更改小车速度,因此就稍微讲解下这部分。
client.println("<p>电机速度: <span id=\"motorSpeed\"></span></p>");
client.println("<input type=\"range\" min=\"0\" max=\"100\" step=\"25\" id=\"motorSlider\" onchange=\"motorSpeed(this.value)\" value=\"" + valueString + "\"/>");
首先,第一行代码用一个<span>元素显示当前滑动条的值。<span>的ID是motorSpeed,用于在JavaScript中动态更新显示的值。
第二行代码创建了一个滑动条(<input type="range">),用于调整电机速度。
属性说明:
- min=“0”:滑动条的最小值为0。
- max=“100”:滑动条的最大值为100。
- step=“25”:滑动条每次移动的步长为25。
- id=“motorSlider”:滑动条的ID,用于在JavaScript中引用。
- οnchange=“motorSpeed(this.value)”:当滑动条的值改变时,调用JavaScript函数motorSpeed并传递当前的值。
- value=“” + valueString + “”:滑动条的初始值,由变量valueString提供。
处理滑动条的事件
获取滑动条元素,并将其赋值给变量slider。
var slider = document.getElementById("motorSlider");
获取显示电机速度的<span>元素,并将滑动条的当前值显示在页面上。
var motorP = document.getElementById("motorSpeed"); motorP.innerHTML = slider.value;
当滑动条的值改变时,更新滑动条本身的值(确保显示正确),并在<span id="motorSpeed">中显示当前值。
client.println("slider.oninput = function() { slider.value = this.value; motorP.innerHTML = this.value; }");
定义一个名为motorSpeed的函数,当滑动条的值改变时调用此函数。该函数使用$.get发送一个HTTP GET请求到服务器,路径中包含滑动条的当前值(如/?value=75&),用于调整电机的PWM占空比。
client.println("function motorSpeed(pos) { $.get(\"/?value=\" + pos + \"&\"); {Connection: close};}</script>");
三、 总结
以上就是本次项目的所有内容。
下次打算再做一个传感器的项目,最后可能会写一些基于Homekit的项目。
※码字不易,本项目代码放在代码放在CSDN仓库,请见谅。或者关注微信公众号:[+大钱硬件],在正文中有完整源码免费公开。

苹果智能家居HomeKit系列文章
ESP32 Homekit实战 - Homekit & Homespan介绍
ESP32 Homekit实战 - 点亮一颗LED


















 462
462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









