







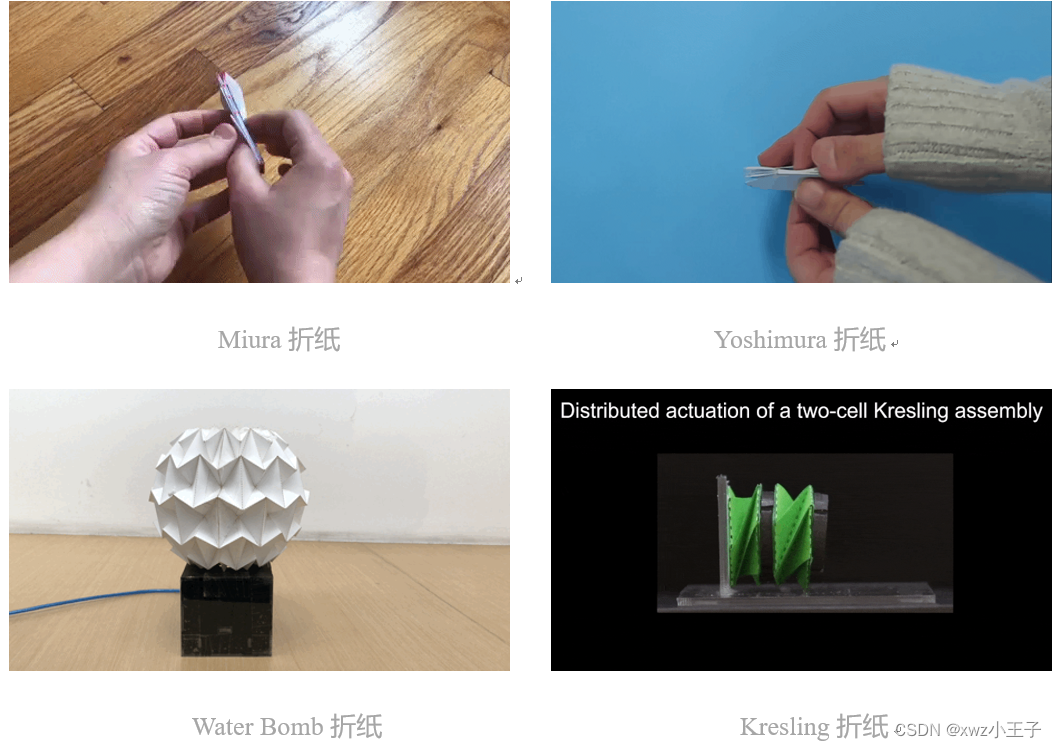
折纸是一种以纸张折成各种不同形状的艺术活动。折纸与自然科学结合在一起,不仅成为建筑学院的教具,还发展出了折纸几何学成为现代几何学的一个分支。根据折痕的不同分布,可以将纸张折叠成不同的形状,例如有许多经典的折纸结构:Miura、Yoshimura、Water Bomb和Kresling……
折纸结构已经在不同的领域得到了应用,例如折纸建筑、折叠电池、飞船太阳能板,折纸机器人,艺术剪纸,医疗折叠病床等。随着软体机器人逐渐成为研究热点,折纸结构也开始应用于软体机器人设计。只要想象力足够,平平无奇的纸张可以变换出无数有趣的玩意儿。
目前,刚性机器人中使用的传统可靠和模块化传感器已经发展得较为成熟,软体机器人需要新的感知解决方案。然而,由于软体机器人制备材料的柔软性和结构顺应性,给软体机器人的传感和控制带来了挑战。
结合在软体机器人、折纸结构和自感知方面的挑战,研究人员提出了一种基于柔性织物压敏材料的自感知扭转塔折纸结构致动器,该研究由南京信息工程大学杨扬团队联合香港中文大学、华南理工大学学者共同完成,研究得到了国家自然科学基金及香港研究资助委员会基金资助,相关成果以“Self-sensing Origami-inspired Soft Twisting Actuators and Its Application in Soft Robots”为题发表于期刊《IEEE ROBOTICS AND AUTOMATION LETTERS》。
▍设计原理
该论文受折纸启发,采用3D打印技术设计了一种扭转塔致动器,在真空压力驱动下,致动器可以实现扭转和收缩的复合运动,扭转方向与倾斜
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









